Upierdliwy w obsłudze, upierdliwy w bazowaniu. A jakiś zalet które by to chociaż trochę równoważyły nie widzę.
A wysłać go do klienta to dopiero byłaby porażka. Fajnie to wygląda tylko na filmikach
na żywo też delty robią duże wrażenie, widziałem jak przekładał czekoladki z jednej bombonierki do drugiej, cała podłoga w hali chodziła, tak zapierniczał. Więc chyba głównie się stosuje tam, gdzie liczy się szybkość, a obciążenia niewielkie.
kamar pisze: A jakiś zalet które by to chociaż trochę równoważyły nie widzę.
No chyba główną zaletą jest możliwość osiągnięcia kosmicznych prędkości jako robot pick and place, obok robota typu SCARA one robią najlepiej taką robotę.
Ale oczywiście mówimy tutaj o maszynach z dużym budżetem Bo w tym wypadku to kartezjański może być bardziej odpowiedni.
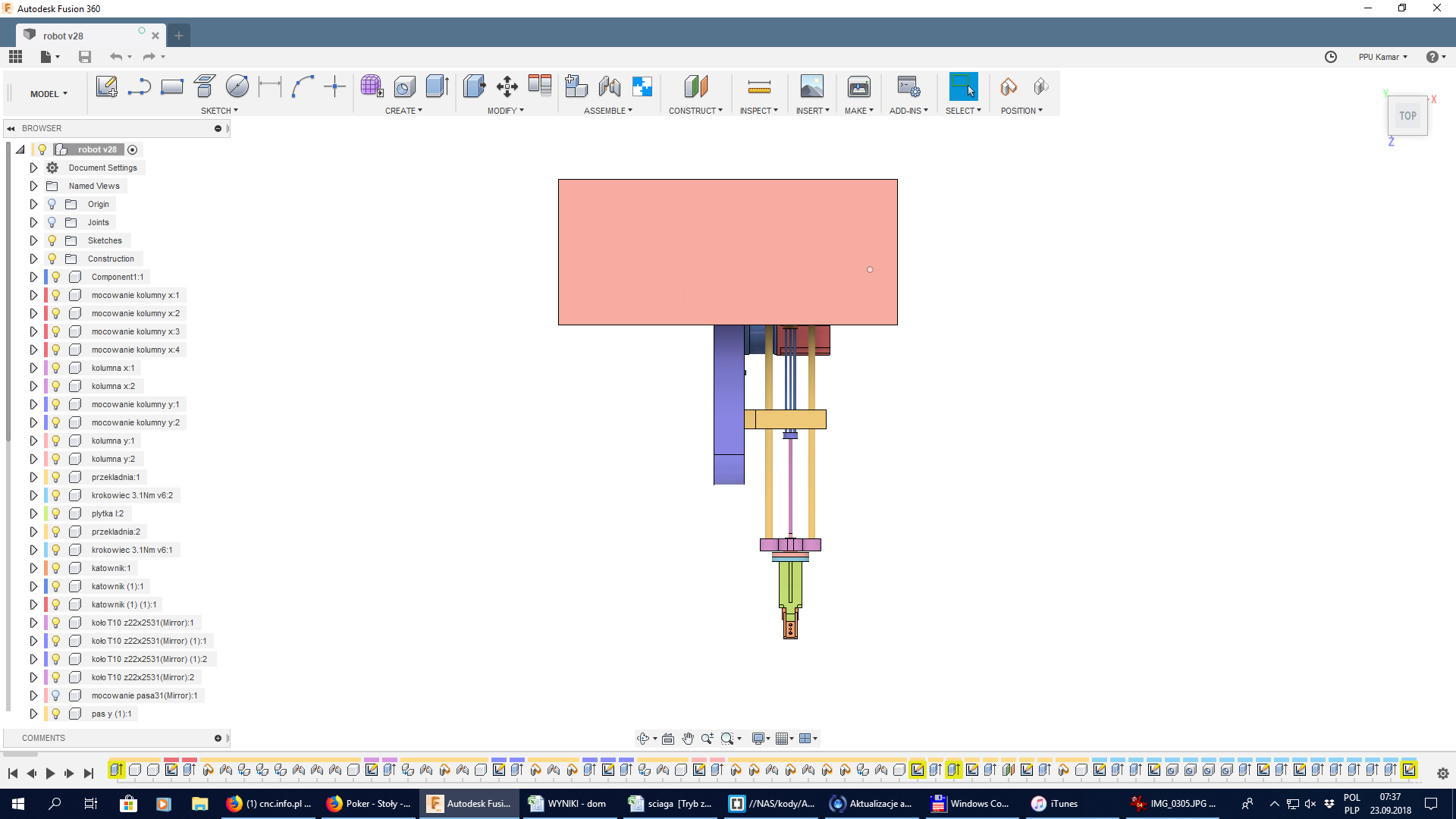
Btw.. w inventorze są biblioteki rożnych komponentów i normaliów, paski nie paski.. W fusion-ie też są? czy robione na piechotę czy z neta jakieś biblioteki ?
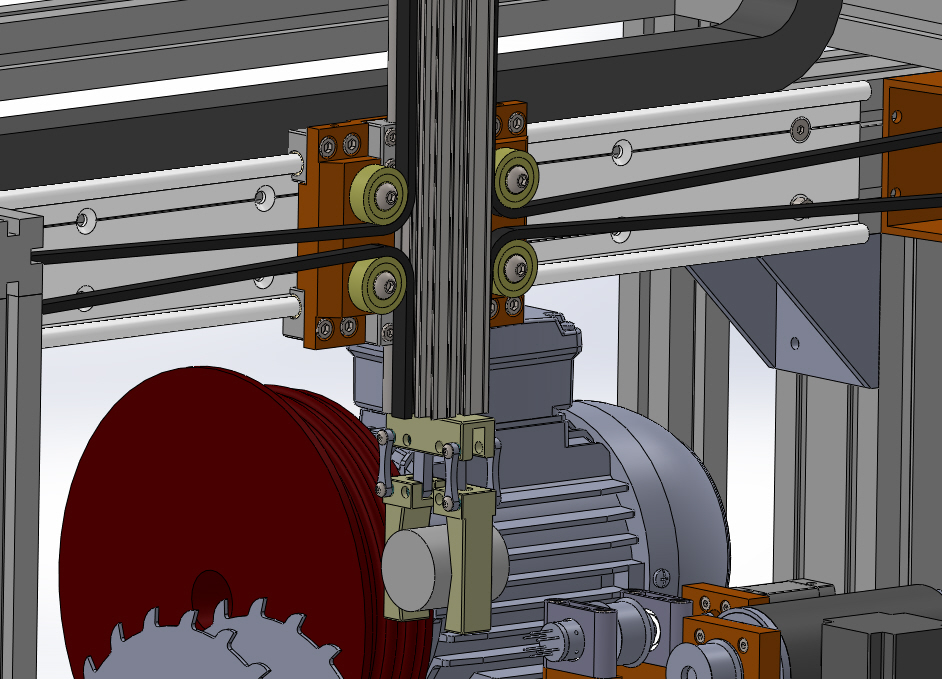
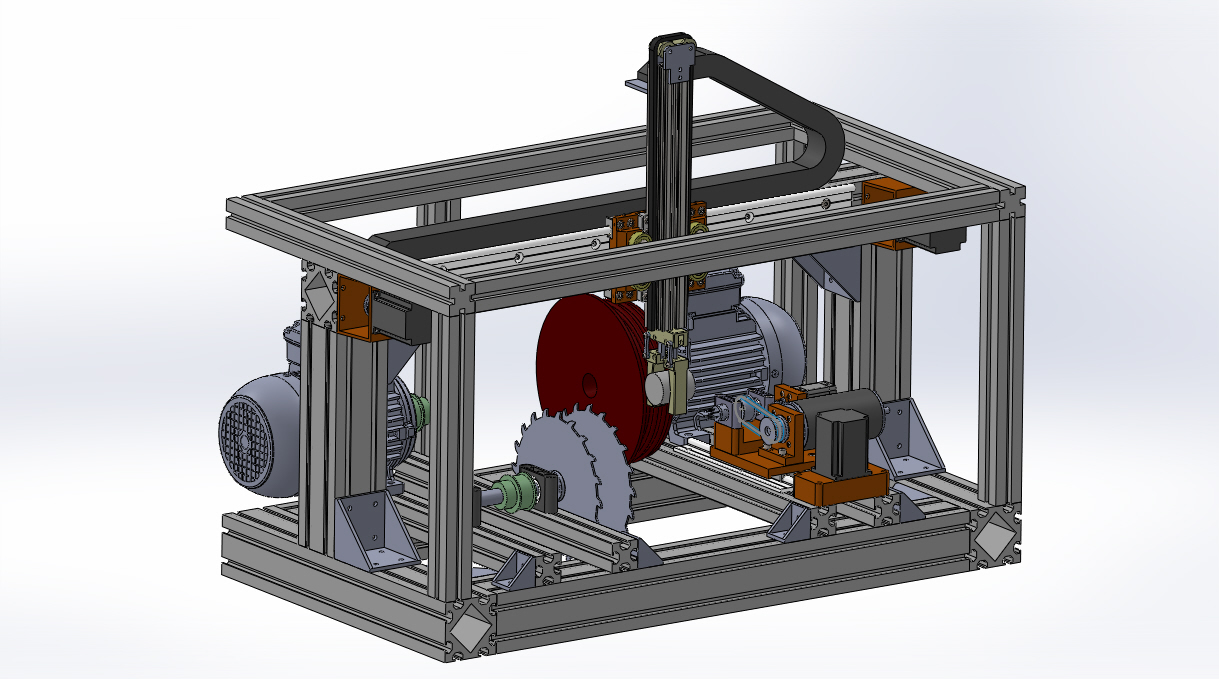
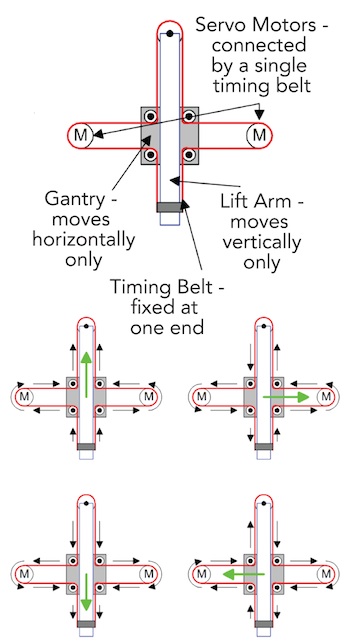
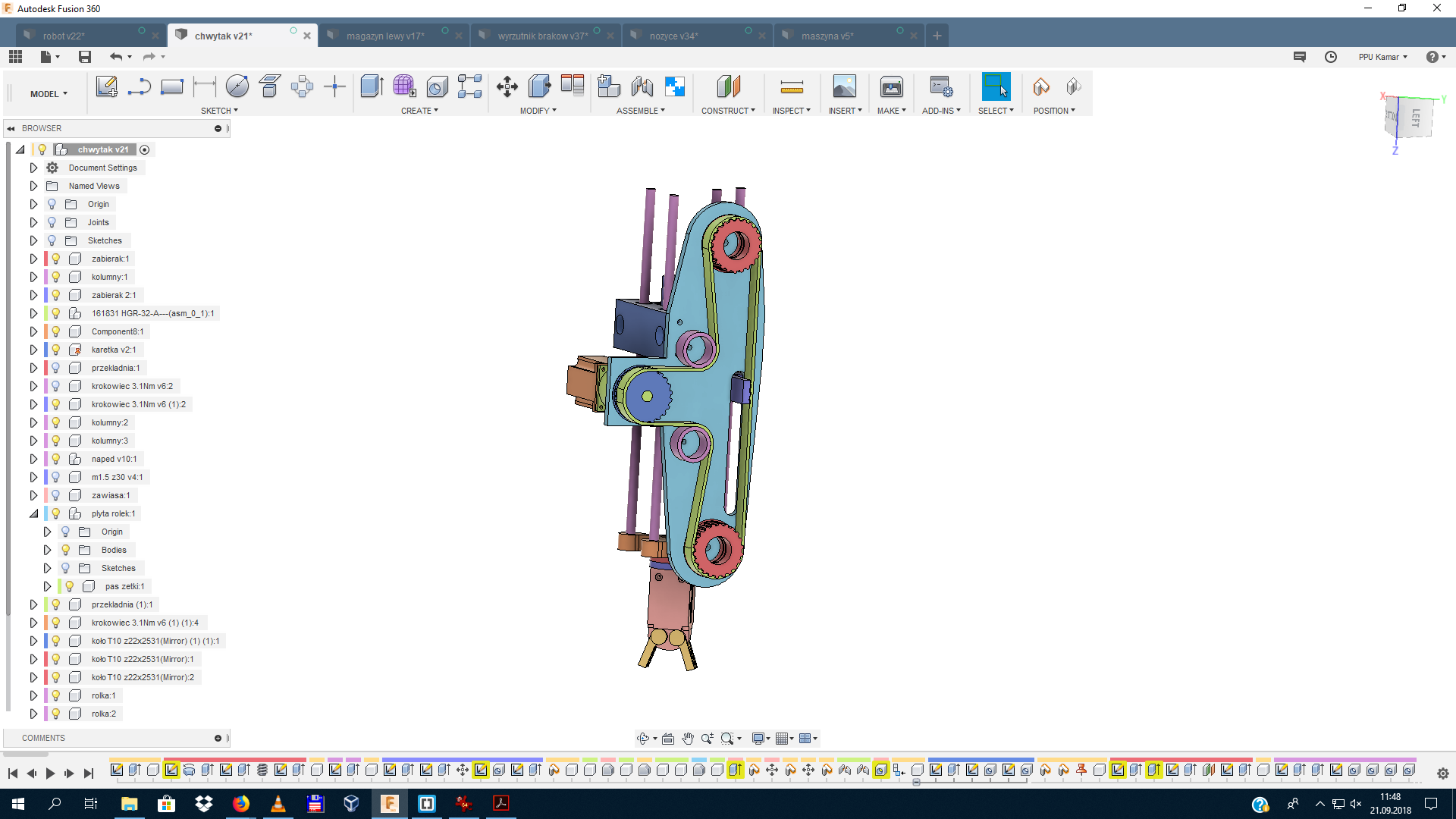
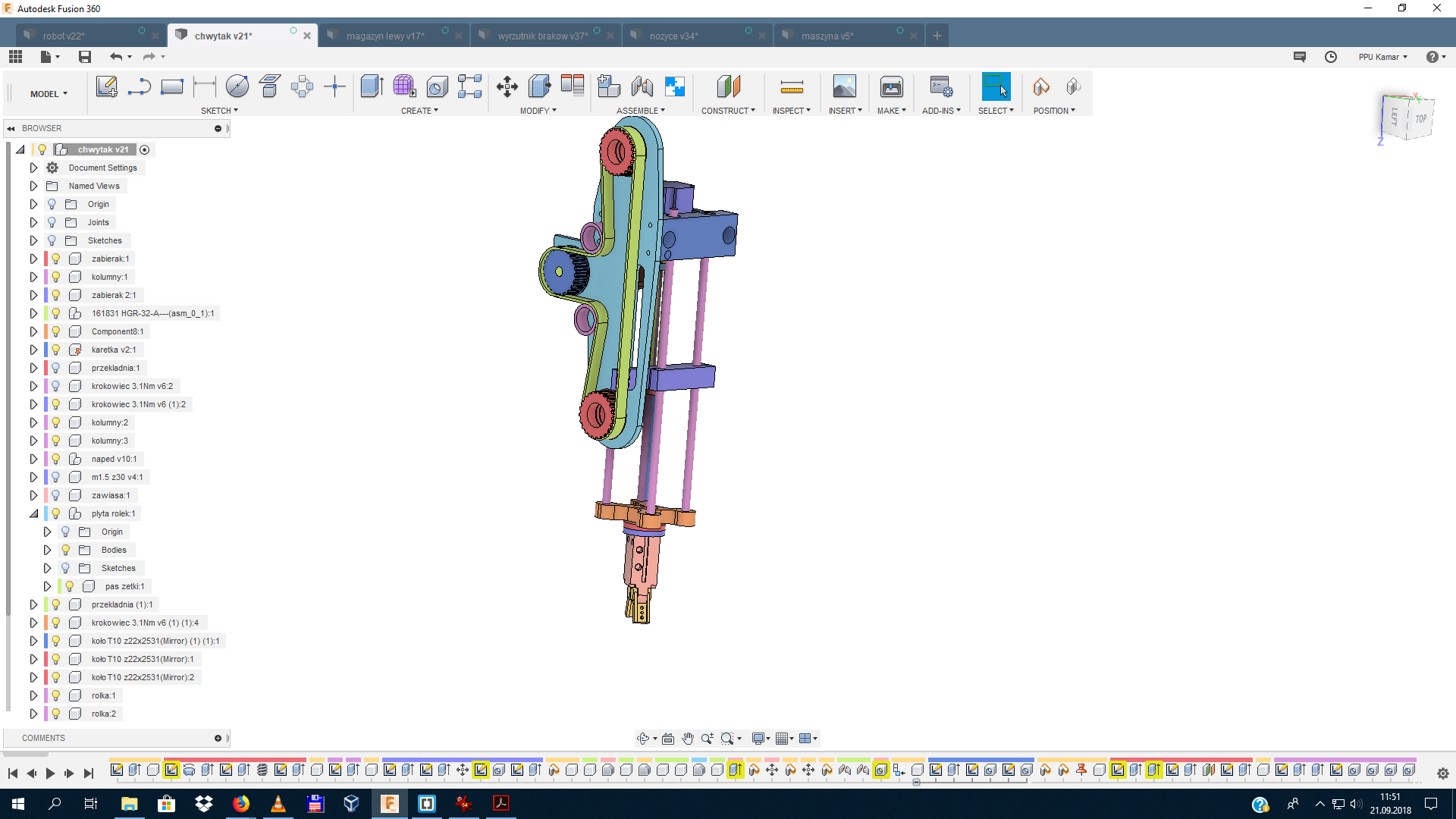
Ja jeszcze kiedyś projektowałem takiego robota, gdzie ruch w dwóch osiach (XZ) był realizowany manipulatorem spotykanym pod nazwą H-BOT. Zaletą jest brak poruszającej się masy silników, bo oba są zamontowane stacjonarnie. Zdjęć nie mam, ale zostały mi screeny z modelu.
Całkiem żwawo to się ruszało.






")
")