



Dodatkowa kinematyka LinuxCNC
-
 k-m-r1
k-m-r1
- ELITA FORUM (min. 1000)
")
- Posty w temacie: 2
- Posty: 1417
- Rejestracja: 23 cze 2008, 10:38
- Lokalizacja: OOL lub DW
- Kontakt:
A te pliki nie są w dodatkowej konfiguracji wgrane? Te lub podobne/identyczne??
[b]MACH3 cnc[/b]Tworzenie Makr do palników magazynków THC OHC inne[b]EKRANY dla firm producentów maszyn[/b] Budowa sprzedaż wypalarki plazma gaz obrotnice Elektrodrążarki Frezarki Tokarki Giętarki3D inne wg zlecenia 888 708 196 Tomek Komor [email protected]
Tagi:


-
bogus105
- Specjalista poziom 2 (min. 300)
")
- Posty w temacie: 3
- Posty: 432
- Rejestracja: 24 gru 2005, 12:59
- Lokalizacja: Bielsko-Biała
koledzy. Szukam materiałów, które pozwolą posiąść wiedzę na temat dodatkowej kinematyki dla linuxcnc. Widzę, że jakieś tutoriale były kilka lat temu, ale pliki z linków zostały usunięte:(
Nawet na stronie:
http://linuxcnc.org/docs/html/motion/kinematics.html
temat kinematyki jest tylko liźnięty. Chciałbym przerobić kinematykę scara dodając jeszcze jeden DOF.
Macie jakieś linki, źródła, tutoriale, które są dla ludzi(nie po robotyce)?:)
Nawet na stronie:
http://linuxcnc.org/docs/html/motion/kinematics.html
temat kinematyki jest tylko liźnięty. Chciałbym przerobić kinematykę scara dodając jeszcze jeden DOF.
Macie jakieś linki, źródła, tutoriale, które są dla ludzi(nie po robotyce)?:)

-
bogus105
- Specjalista poziom 2 (min. 300)
- Posty w temacie: 3
- Posty: 432
- Rejestracja: 24 gru 2005, 12:59
- Lokalizacja: Bielsko-Biała
Dzięki Tomasz_K za linki.
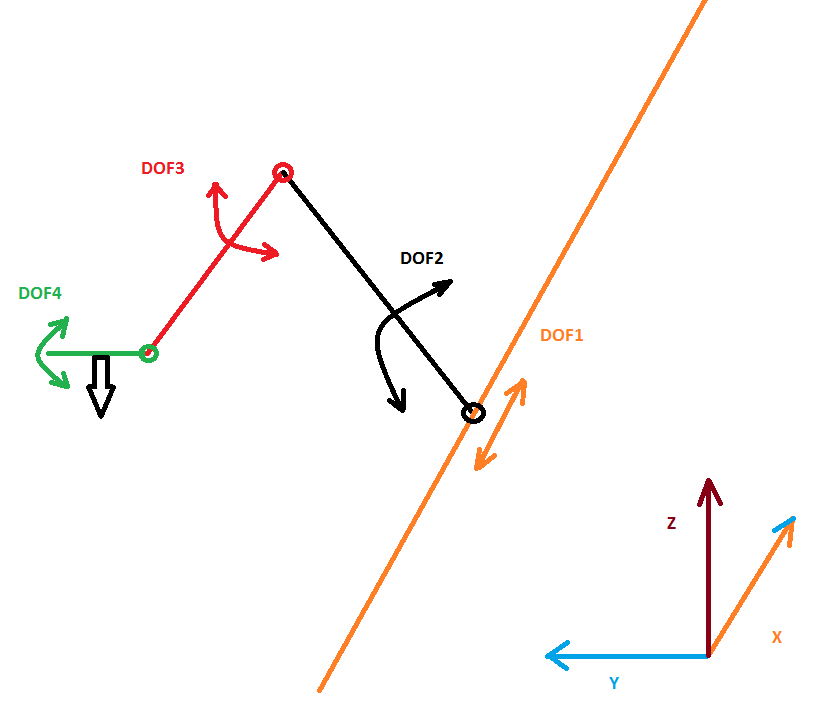
Ma ktoś pojęcie jak połączyć ramię typu scara z ruchem liniowym w jednej osi? chodzi mi o to, żeby w osi X jeździł wózek, na którym jest ramię, które realizuje tylko ruch w płaszczyźnie YZ. X ma być liniowe. Czyli idąc od bazy:
1. pierwszy DOF to oś liniowa (X)
2. drugi DOF to oś obrotowa
3. trzeci DOF to oś obrotowa
4. czwarty DOF też obrotowy, bo narzędzie (czarna strzałka na rysunku) musi być cały czas prostopadle do stołu wzdłuż którego jeździ sobie cały układ.
no za cholerę...
poniżej rysunek - wiem, że prymitywny, ale i tak lepszy od niektórych prac wiszących na ścianach w galeriach sztuki;P
Ma ktoś pojęcie jak połączyć ramię typu scara z ruchem liniowym w jednej osi? chodzi mi o to, żeby w osi X jeździł wózek, na którym jest ramię, które realizuje tylko ruch w płaszczyźnie YZ. X ma być liniowe. Czyli idąc od bazy:
1. pierwszy DOF to oś liniowa (X)
2. drugi DOF to oś obrotowa
3. trzeci DOF to oś obrotowa
4. czwarty DOF też obrotowy, bo narzędzie (czarna strzałka na rysunku) musi być cały czas prostopadle do stołu wzdłuż którego jeździ sobie cały układ.
no za cholerę...
poniżej rysunek - wiem, że prymitywny, ale i tak lepszy od niektórych prac wiszących na ścianach w galeriach sztuki;P
-
bogus105
- Specjalista poziom 2 (min. 300)
- Posty w temacie: 3
- Posty: 432
- Rejestracja: 24 gru 2005, 12:59
- Lokalizacja: Bielsko-Biała
Dzięki GumiRobot. Widziałem to już z pięć lat temu:) Z gościem jednak nie mogę się skontaktować.
Pytanie następne: mam jakąkolwiek kinematykę skompilowaną. Jak ją zastosować w konkretnej konfiguracji?
Na przykład dla robota scara? Uruchomić konfigurator z przykładową konfiguracją scara i przerobić pliki INI i HAL i w nich dodatkowo dać odnośnik do nowej kinematyki?
Pytanie następne: mam jakąkolwiek kinematykę skompilowaną. Jak ją zastosować w konkretnej konfiguracji?
Na przykład dla robota scara? Uruchomić konfigurator z przykładową konfiguracją scara i przerobić pliki INI i HAL i w nich dodatkowo dać odnośnik do nowej kinematyki?
-
k-m-r1
- ELITA FORUM (min. 1000)
- Posty w temacie: 2
- Posty: 1417
- Rejestracja: 23 cze 2008, 10:38
- Lokalizacja: OOL lub DW
- Kontakt:
skompilowana kinematyka zostaje
jak trzeba to w konfiguracji dodajesz parametry osi np długość
a potem: to akurat scara:D
[ Dodano: 2017-05-09, 16:38 ]
a można wiedzieć jak kompilowałeś kinematyke?
korzystałem z gotowej scary a miałem pare pomysłów na zmianę
Gdybyś opisał to sie przyda
[ Dodano: 2017-05-09, 16:39 ]
gdzieś dodawałem całę pliki ustawień hal + ini + scara 3d bryła a nie pamiętam który to post
[ Dodano: 2017-05-09, 16:46 ]
To znowu ja
Ten obrazek z poprzedniego posta to jak by kinematyka PUMA ale bez obrotowej podstawy. Wywalić podstawę przerobić resztę kinematyki i zostawić oś X liniową. Ale to nie to bo robot będzie upośledzony ograniczony w poruszaniu :/
jak trzeba to w konfiguracji dodajesz parametry osi np długość
a potem: to akurat scara:D
Kod: Zaznacz cały
loadrt scarakins # wczytanie kinematyki scara
setp scarakins.D1 0 # wys podłorze do ramie wewnetrzne
setp scarakins.D2 200 # długosc ranienia A1
setp scarakins.D3 0 # 25wys miedzy ramie-1 ramie-2
setp scarakins.D4 200 # długośc ramienia A4
setp scarakins.D5 0 # wysokosc miedzy ramie-2 z koncem narzedzie
setp scarakins.D6 0 # odległość w plaszczyzie end-ramie-2 a koncem narzedzia 0 jeśli jest w osi
loadrt [EMCMOT]EMCMOT base_period_nsec=[EMCMOT]BASE_PERIOD servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[TRAJ]AXES
loadrt probe_parport
loadrt hal_parport cfg="0x378 out"
setp parport.0.reset-time 5000
loadrt stepgen step_type=0,0
i dalej ..... [ Dodano: 2017-05-09, 16:38 ]
a można wiedzieć jak kompilowałeś kinematyke?
korzystałem z gotowej scary a miałem pare pomysłów na zmianę
Gdybyś opisał to sie przyda
[ Dodano: 2017-05-09, 16:39 ]
gdzieś dodawałem całę pliki ustawień hal + ini + scara 3d bryła a nie pamiętam który to post
[ Dodano: 2017-05-09, 16:46 ]
To znowu ja
Ten obrazek z poprzedniego posta to jak by kinematyka PUMA ale bez obrotowej podstawy. Wywalić podstawę przerobić resztę kinematyki i zostawić oś X liniową. Ale to nie to bo robot będzie upośledzony ograniczony w poruszaniu :/
[b]MACH3 cnc[/b]Tworzenie Makr do palników magazynków THC OHC inne[b]EKRANY dla firm producentów maszyn[/b] Budowa sprzedaż wypalarki plazma gaz obrotnice Elektrodrążarki Frezarki Tokarki Giętarki3D inne wg zlecenia 888 708 196 Tomek Komor [email protected]






