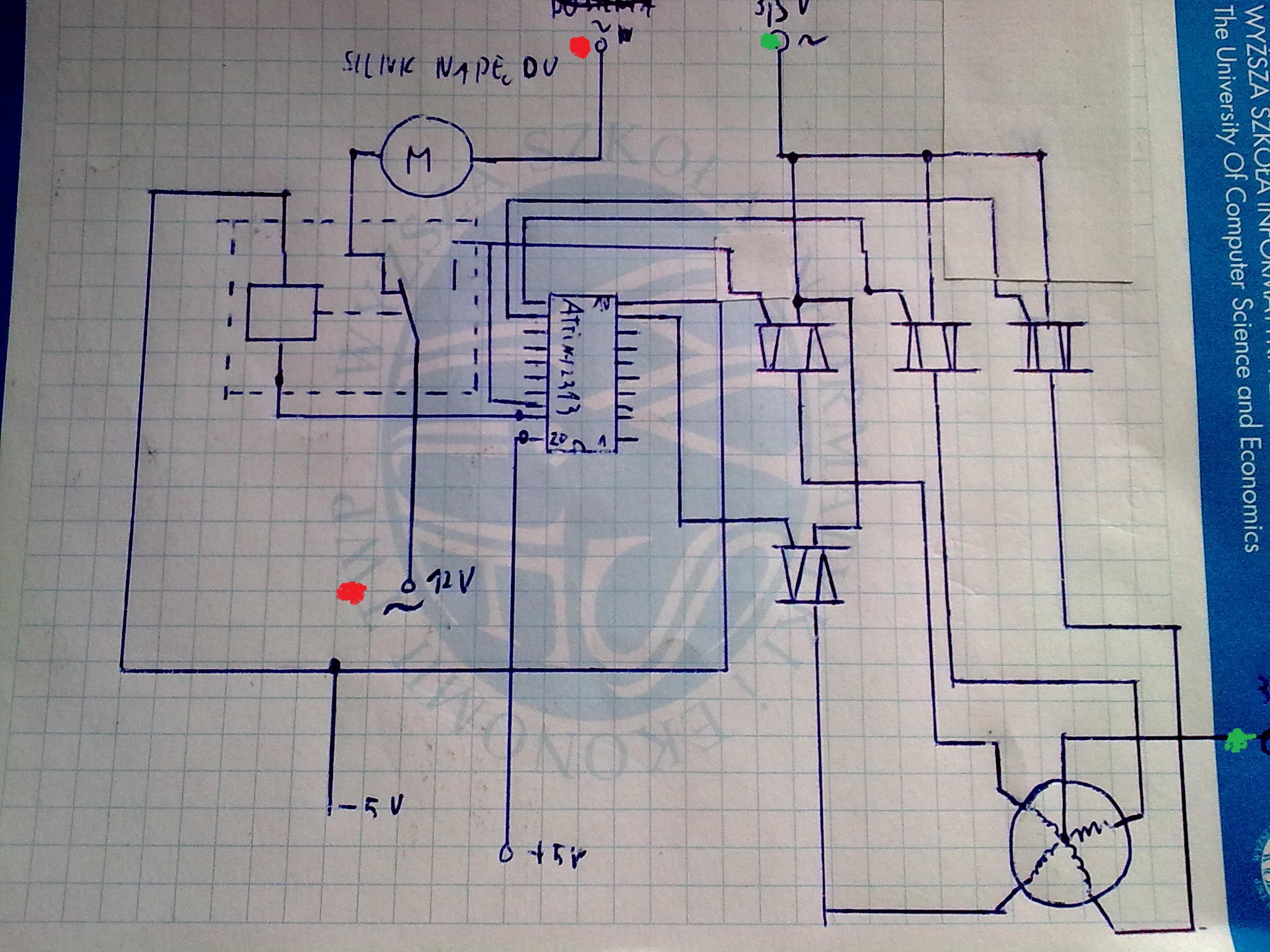
kżyśó pisze:podpowie co nieco, bo ja nie mam innego pomysłu na ten układ
jeśli to ma być sterownik krokowca, to nic nie trzeba wymyślać...
można zrobić sterownik unipolarny(co najprościej)...
4 klucze (bipolarne lub mosfety) + prosty układ sterujący... (dużo tego można znaleźć w necie)
Kod: Zaznacz cały
Types 2 and higher: State Patterns
STATE |---1---|---2---|---3---|----4----|---3---|---2---|
| | | | | | |
Time |--(1)--|--(1)--|--(1)--|--(1+5)--|--(1)--|--(1)--|
All the remaining stepping types are simply different repeating
patterns on two to five output pins. When a step occurs, the
output pins change to the next (or previous) pattern in the
state listings that follow. The output pins are called 'PhaseA'
thru 'PhaseE'. Timing constraints are obeyed as indicated
in the drawing above. 'steplen' must be non-zero. 'dirdelay'
may be zero. Because stepspace is not used, state based
stepping types can run faster than types 0 and 1.
Type 2: Quadrature (aka Gray/Grey code)
State Phase A Phase B
0 1 0
1 1 1
2 0 1
3 0 0
0 1 0
Type 3: Three Wire
State Phase A Phase B Phase C
0 1 0 0
1 0 1 0
2 0 0 1
0 1 0 0
Type 4: Three Wire HalfStep
State Phase A Phase B Phase C
0 1 0 0
1 1 1 0
2 0 1 0
3 0 1 1
4 0 0 1
5 1 0 1
0 1 0 0
Type 5: Unipolar Full Step (one winding on)
State Phase A Phase B Phase C Phase D
0 1 0 0 0
1 0 1 0 0
2 0 0 1 0
3 0 0 0 1
0 1 0 0 0
Type 6: Unipolar Full Step (two windings on)
State Phase A Phase B Phase C Phase D
0 1 1 0 0
1 0 1 1 0
2 0 0 1 1
3 1 0 0 1
0 1 1 0 0
Type 7: Bipolar Full Step (one winding on)
State Phase A Phase B Phase C Phase D
0 1 0 0 0
1 1 1 1 0
2 0 1 1 1
3 0 0 0 1
0 1 0 0 0
Type 8: Bipolar Full Step (two windings on)
State Phase A Phase B Phase C Phase D
0 1 0 1 0
1 0 1 1 0
2 0 1 0 1
3 1 0 0 1
0 1 0 1 0
Type 9: Unipolar Half Step
State Phase A Phase B Phase C Phase D
0 1 0 0 0
1 1 1 0 0
2 0 1 0 0
3 0 1 1 0
4 0 0 1 0
5 0 0 1 1
6 0 0 0 1
7 1 0 0 1
0 1 0 0 0
Type 10: Bipolar Half Step
State Phase A Phase B Phase C Phase D
0 1 0 0 0
1 1 0 1 0
2 1 1 1 0
3 0 1 1 0
4 0 1 1 1
5 0 1 0 1
6 0 0 0 1
7 1 0 0 1
0 1 0 0 0
Type 11: Five Wire Unipolar
State Phase A Phase B Phase C Phase D Phase E
0 1 0 0 0 0
1 0 1 0 0 0
2 0 0 1 0 0
3 0 0 0 1 0
4 0 0 0 0 1
0 1 0 0 0 0
Type 12: Five Wire Wave
State Phase A Phase B Phase C Phase D Phase E
0 1 1 0 0 0
1 0 1 1 0 0
2 0 0 1 1 0
3 0 0 0 1 1
4 1 0 0 0 1
0 1 1 0 0 0
Type 13: Five Wire Unipolar HalfStep
State Phase A Phase B Phase C Phase D Phase E
0 1 0 0 0 0
1 1 1 0 0 0
2 0 1 0 0 0
3 0 1 1 0 0
4 0 0 1 0 0
5 0 0 1 1 0
6 0 0 0 1 0
7 0 0 0 1 1
8 0 0 0 0 1
9 1 0 0 0 1
0 1 0 0 0 0
Type 14: Five Wire Wave HalfStep
State Phase A Phase B Phase C Phase D Phase E
0 1 1 0 0 0
1 1 1 1 0 0
2 0 1 1 0 0
3 0 1 1 1 0
4 0 0 1 1 0
5 0 0 1 1 1
6 0 0 0 1 1
7 1 0 0 1 1
8 1 0 0 0 1
9 1 1 0 0 1
0 1 1 0 0 0
to jest z pliku
stepgen.c z źródeł linuxcnc...
opis załączania cewek silników krokowych (chyba wszystkich znanych rodzajów)
[ Dodano: 2012-09-03, 16:13 ]
kżyśó pisze:chodzi o mini sekundy (mS) czy mikro sekundy (uS)?
przy sterowaniu STEP/DIR gotowego sterownika (np. M542, M543, M545, MDC860, MDC878, M880a...itd) - chodzi o czas trwania impulsu STEP w uS -->>1.5uS...2.5uS, bo sygnał przechodzi przez optoizolację
nie chodzi tutaj o czas trzymania włączenia cewki silnika... to zupełnie inna bajka





")



")
")