



Rzeczywiście - miałeś szczęście zwarzywszy, że transpotory tego typu w ogóle do tego celu się nie nadają. Bo cóż z tego, że ma częstotliwość graniczną 80KHz jak szerokość impulsu step (stan wysoki) z portu LPT może mieć np. 1us (przy częstotliwości 1KHz np.) a czas odpowiedzi takiego transoptorka to 3-4usChińczycy włożyli PC817 i nie działało, a ja włożyłem PC817 i działa ...
Tylko oni włożyli grupy C, a ja D i do tego pewnie trochę szczęścia miałem.
Chiński sterownik HY-TA3DV-M 3xTB6560 - recenzja
-
 cosimo
cosimo
- Specjalista poziom 3 (min. 600)
")
- Posty w temacie: 1
- Posty: 641
- Rejestracja: 21 maja 2008, 10:02
- Lokalizacja: Damasławek
Tagi:


")
-
 tuxcnc
tuxcnc
- Lider FORUM (min. 2000)
")
- Posty w temacie: 26
- Posty: 9813
- Rejestracja: 26 lut 2011, 23:24
- Lokalizacja: mazowieckie
Szerokość impulsu to akurat można sobie ustawić i nie widzę sensu dawać nanosekundowe szpilki, kiedy sygnał może mieć maksymalnie piętnaście kiloherców.cosimo pisze:transpotory tego typu w ogóle do tego celu się nie nadają. Bo cóż z tego, że ma częstotliwość graniczną 80KHz jak szerokość impulsu step (stan wysoki) z portu LPT może mieć np. 1us (przy częstotliwości 1KHz np.) a czas odpowiedzi takiego transoptorka to 3-4us
A 6N137 do tego sterownika nie włożysz.
.
-
tuxcnc
- Lider FORUM (min. 2000)
- Posty w temacie: 26
- Posty: 9813
- Rejestracja: 26 lut 2011, 23:24
- Lokalizacja: mazowieckie
Jak się okazuje oczy już nie te ...
Transoptory wymieniłem na PC817 serii B, a nie jak pisałem D.
Zrobiłem pomiary statyczne i zgodnie z oznaczeniem producenta transoptory włożone przez Chińczyków mają wyższy CTR, czyli wyższą czułość.
W tej sytuacji to już pomiarów dynamicznych robić mi się nie chce.
Może jeszcze wybiorę transoptor z najniższym CTR i zobaczę jak zadziała.
Czyli wychodzi, że transoptory szumią, bo są za czułe.
Nie znalazłem też na płytce kondensatorów blokujących zasilanie buforów 74HC14, pewnie warto dodać.
Układy ograniczające prąd na postoju powinny działać dobrze albo wcale, więc ich ruszać nie będę.
.
Transoptory wymieniłem na PC817 serii B, a nie jak pisałem D.
Zrobiłem pomiary statyczne i zgodnie z oznaczeniem producenta transoptory włożone przez Chińczyków mają wyższy CTR, czyli wyższą czułość.
W tej sytuacji to już pomiarów dynamicznych robić mi się nie chce.
Może jeszcze wybiorę transoptor z najniższym CTR i zobaczę jak zadziała.
Czyli wychodzi, że transoptory szumią, bo są za czułe.
Nie znalazłem też na płytce kondensatorów blokujących zasilanie buforów 74HC14, pewnie warto dodać.
Układy ograniczające prąd na postoju powinny działać dobrze albo wcale, więc ich ruszać nie będę.
.
-
ucy7400
- Sympatyk forum poziom 2 (min. 50)
")
- Posty w temacie: 20
- Posty: 51
- Rejestracja: 23 maja 2010, 23:04
- Lokalizacja: ziemia
Wymienilem TB6550 odpowiadajacy za os X i os zaczela dzialac.
Zabezpieczajace diody wolnego kola sa OK - nie zostaly zniszczone.
Teraz zabiore sie za os Y.
Jaka maksymalna ilosc pulsow/krokow na skeunde moge osiagnac z EMC2 przy naszym sterowniku?
Zastanawiam sie nad przerobka torow sygnalow wychodzacych z P16 i P17 LPT.
Wyjscia te sa wypuszczone wprost z portu - chronia je jedynie dwie diody.
Mozna by je przepuscic przez dwie wolne bramki w ukladach 74hc14 - zawsze to jakas izolacja dla LPT.
Zabezpieczajace diody wolnego kola sa OK - nie zostaly zniszczone.
Teraz zabiore sie za os Y.
Jaka maksymalna ilosc pulsow/krokow na skeunde moge osiagnac z EMC2 przy naszym sterowniku?
Zastanawiam sie nad przerobka torow sygnalow wychodzacych z P16 i P17 LPT.
Wyjscia te sa wypuszczone wprost z portu - chronia je jedynie dwie diody.
Mozna by je przepuscic przez dwie wolne bramki w ukladach 74hc14 - zawsze to jakas izolacja dla LPT.
-
tuxcnc
- Lider FORUM (min. 2000)
- Posty w temacie: 26
- Posty: 9813
- Rejestracja: 26 lut 2011, 23:24
- Lokalizacja: mazowieckie
To jest typowe, miałem dokładnie to samo.ucy7400 pisze:Wymienilem TB6550 odpowiadajacy za os X i os zaczela dzialac.
Zabezpieczajace diody wolnego kola sa OK - nie zostaly zniszczone.
Teraz zabiore sie za os Y.
Obawiam się jednak, że nowe scalaki mogą pójść z dymem bez wyraźnego powodu.
Wymieniłem u siebie wszystkie transoptory na serię B, ale przedtem je pomierzyłem.
Okazało się, że rozkład statystyczny parametrów jest prawie liniowy i tylko połowa spełniała przyjęte przeze mnie kryteria.
Niestety pomiary były metodą porównawczą i absolutnych wartości parametrów nie znam, ale porównując dane katalogowe wychodzi, że poprawnie pracują transoptory z CTR około 120-150%.
Układów z mniejszym CTR nie mam, to i sprawdzić nie mogę.
Co do ustawień EMC2, to u mnie jest szerokość sygnału 10 µS (10000ns), pół kroku i maksymalna częstotliwość 8 kHz.
Ponieważ silniki ładnie pracują, to niczego zmieniać nie mam zamiaru.
EMC potrafi dużo większe częstotliwości wygenerować, ale Toshiba obiecuje raptem 15 kHz pasma, a i transoptory demonami prędkości nie są.
Dlatego wolę pewne pół kroku i osiem kiloherców niż zabawę w overclocking.
.
-
ucy7400
- Sympatyk forum poziom 2 (min. 50)
- Posty w temacie: 20
- Posty: 51
- Rejestracja: 23 maja 2010, 23:04
- Lokalizacja: ziemia
Wymieniłem układ dla osi Y. Działa poprawnie.
Na naszej płycie, nieuziemiony radiator łączy ze sobą trzy układy via pasta silikonowa.
Wygląda na to, że albo radiator i stykające się z nim metalowe powierzchnie układów powinny być uziemione, albo całkowicie odizolowane i od radiatora i od siebie nawzajem.
tuxcnc:
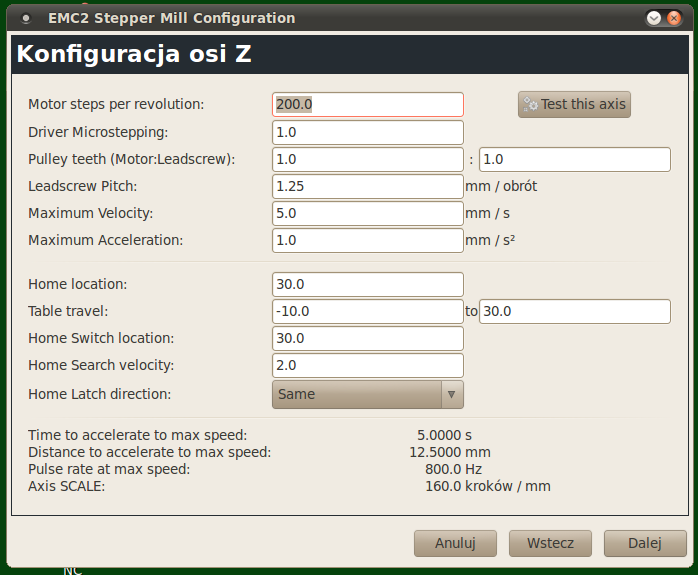
Załącz proszę screeny z wizard'a EMC ze swoją konfiguracją.
Znalazłem powyższą informację w nocie katalogowej TB6560.Heat Sink Fin Processing The IC fin (rear) is electrically connected to the rear of the chip. If current flows to the fin, the IC will malfunction. If there is any possibility of a voltage being generated between the IC GND and the fin, either ground the fin or insulate it.
Na naszej płycie, nieuziemiony radiator łączy ze sobą trzy układy via pasta silikonowa.
Wygląda na to, że albo radiator i stykające się z nim metalowe powierzchnie układów powinny być uziemione, albo całkowicie odizolowane i od radiatora i od siebie nawzajem.
tuxcnc:
Załącz proszę screeny z wizard'a EMC ze swoją konfiguracją.
Ostatnio zmieniony 25 cze 2011, 19:04 przez ucy7400, łącznie zmieniany 1 raz.
-
tuxcnc
- Lider FORUM (min. 2000)
- Posty w temacie: 26
- Posty: 9813
- Rejestracja: 26 lut 2011, 23:24
- Lokalizacja: mazowieckie
ucy7400 pisze:tuxcnc:
Załącz proszę screeny z wizard'a EMC ze swoją konfiguracją.
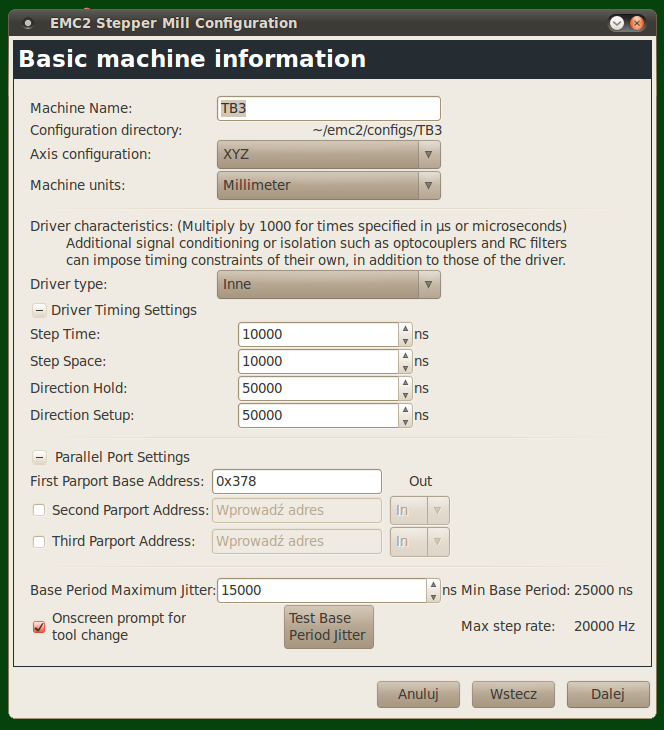
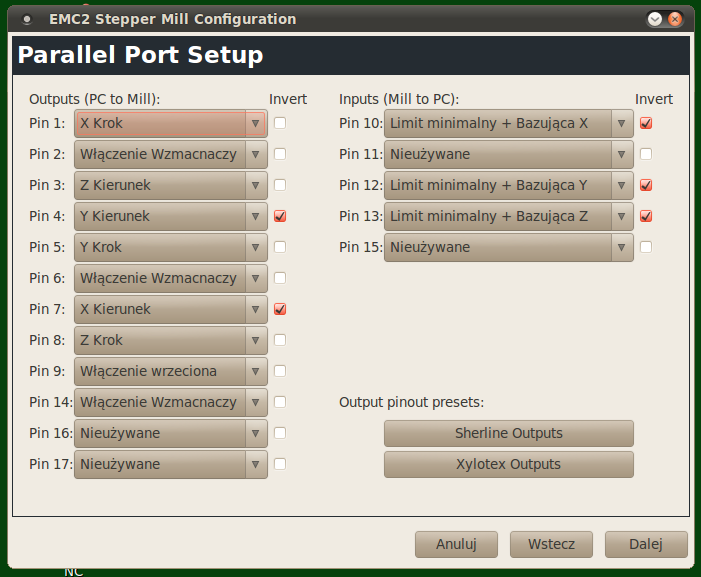
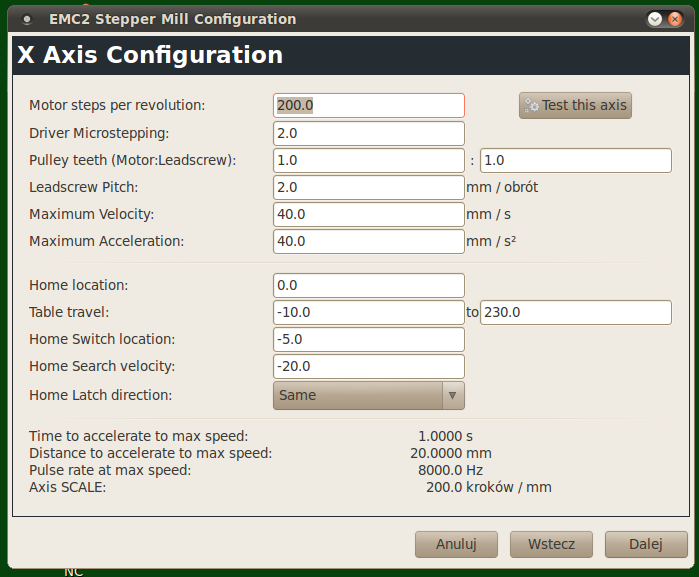

Osie nie są po kolei na złączu sterownika, bo je przełączałem jak gubił kroki i tak już zostało.
Zetka jest po środku, a X i Y po bokach.
W X i Y mam silniki 3,6 A, około 1 oma rezystancji i śruby o skoku 2 mm, natomiast w zetce siedzi Vexta 1 A, 15 omów ze szpilką M8 i strasznie muli.
Ale w zetce mam raptem 40 mm skoku i nie mam motywacji wymieniać silnika.
Szybkości w X i Y będę musiał odjąć, bo teraz mam 2400 mm/min, silniki i sterownik wyrabiają bez problemu, ale wszystko się trzęsie.
.
.






