Pozdrawiam
Silnik krokowy + mikroprocesor = liniał lub enkoder
-
 blue_17
blue_17
- ELITA FORUM (min. 1000)
")
- Posty w temacie: 5
- Posty: 1715
- Rejestracja: 16 kwie 2009, 07:55
- Lokalizacja: Kraków/Kornatka
Na elektrodzie jest jeszcze mowa o starym sprzęcie ulepszali go i jeden z moich znajomych który ma ciekawe zabawki również go ma i do cyfrówki go sobie chwali, do pracy w laboratorium jak i również do testów w przemyśle nieco gorzej wypowiadał odnośnie pomiarów innych sygnałów analogowych ale może to dlatego że ma stacjonarny na prawdę dobry sprzęt 
Pozdrawiam
Pozdrawiam
"I siedzieli oni razem pod nagim DOS-em i nie wstydzili sie tego." 
Tagi:


-
 markcomp77
markcomp77
- Lider FORUM (min. 2000)
")
- Posty w temacie: 20
- Posty: 3975
- Rejestracja: 18 wrz 2004, 12:51
- Lokalizacja: k/w-wy
- Kontakt:
szkoda, że w tych nawet trochę droższych oscyloskopach nie ma separacji galwanicznej wejść kanałów...
trudno jest dlatego, równocześnie obserwować prąd faz silnika (2 fazowego... krokowca... czy więcej fazowego innego rodzaju)
[ Dodano: 2012-09-25, 11:10 ]
jest ciekawa recenzja:
[youtube][/youtube][/youtube]
trudno jest dlatego, równocześnie obserwować prąd faz silnika (2 fazowego... krokowca... czy więcej fazowego innego rodzaju)
[ Dodano: 2012-09-25, 11:10 ]
jest ciekawa recenzja:
[youtube][/youtube][/youtube]
SpotkanieCNC: STOM-TOOL Marzec 2014
http://www.cnc.info.pl/topics79/spotkan ... t55028.htm
http://www.cnc.info.pl/topics79/spotkan ... t55028.htm
-
 tuxcnc
tuxcnc
- Lider FORUM (min. 2000)
- Posty w temacie: 8
- Posty: 8106
- Rejestracja: 26 lut 2011, 23:24
- Lokalizacja: mazowieckie
Wracając do tematu, to się wreszcie zebrałem i złożyłem układ dwukanałowy.
Podłączyłem pod analizator stanów logicznych i pokręcałem silnik wkrętarką.
Jest dokładnie tak, jak się spodziewałem.
Powyżej pewnych minimalnych obrotów dostajemy piękną kwadraturę, poniżej ciag impulsów z którego nic się nie da wywnioskować.
Planuję ten układ zastosować jako enkoder wrzeciona tokarki.
Tam obroty nie zmieniają się gwałtownie, a ewentualny błąd koryguje impuls indeksowy.
Jako liniał to nie zda egzaminu.
.
Podłączyłem pod analizator stanów logicznych i pokręcałem silnik wkrętarką.
Jest dokładnie tak, jak się spodziewałem.
Powyżej pewnych minimalnych obrotów dostajemy piękną kwadraturę, poniżej ciag impulsów z którego nic się nie da wywnioskować.
Planuję ten układ zastosować jako enkoder wrzeciona tokarki.
Tam obroty nie zmieniają się gwałtownie, a ewentualny błąd koryguje impuls indeksowy.
Jako liniał to nie zda egzaminu.
.

-
 pitsa
pitsa
Autor tematu - Moderator
-
Lider FORUM (min. 2000)
- Posty w temacie: 15
- Posty: 4776
- Rejestracja: 13 wrz 2008, 22:40
- Lokalizacja: PL,OP
Projekt "silnik krokowy + mikroprocesor = liniał lub enkoder" mam na etapie enkodera i myślowych eksperymentów. 
Bilans:
* straty: poszło trochę kasy na zabawkę i ... czasu ...
* zyski: kilka nowych malutkich umiejętności i możliwości. Na przykład oglądanie prostych sygnałów przy pomocy kieszonkowego DSO.
Wnioski:
Zastosowanie jako liniał jest mocno ograniczone i rzeczywiście, tu lepiej konkretnie trzymać się rozwiązania szczelina plus podczerwień.
Gdyby trzymać się jednak uparcie tego, że musi być użyty silnik krokowy, to problem wykrycia ruchu przy bardzo małej prędkości można rozwiązać elastycznym sprzęgłem. Działałoby to tak: między elementem obracającym się, a osią silnika jest gumowa rurka. Powolny obrót powoduje powstanie naprężenia skręcającego i po przekroczeniu pewnego progu następuje przeskok i uwolnienie energii "skręcenia", następnie następuje ponowne "ładowanie sprzęgła elastycznego". Wiem, że to praktycznie jest bez sensu, ale teoretycznie możliwe.
Zastosowanie silnika krokowego jako "zadajnik-impulsator" jest bardzo przyjemne, w sensie odpowiedzi zwrotnej dotykowej podczas kręcenia silnikiem. Przyjemniej niż w impulsatorach, które do tej pory używałem w różnych urządzeniach. To reakcję silnika na obrót można ustawić zwierając odpowiednio cewki. Część cewek możne tym sposobem służyć jako "generator wrażenia dotykowego", a część do pomiaru.
Tak to wygląda na kieszonkowym DSO:

Ładnie, no nie?
Sądzę, że użycie silnika krokowego jako zadajnik-impulsator warto dalej rozwijać, jako liniał i enkoder nie ma sensu - są zdecydowanie prostsze sposoby.
Bilans:
* straty: poszło trochę kasy na zabawkę i ... czasu ...
* zyski: kilka nowych malutkich umiejętności i możliwości. Na przykład oglądanie prostych sygnałów przy pomocy kieszonkowego DSO.
Wnioski:
Zastosowanie jako liniał jest mocno ograniczone i rzeczywiście, tu lepiej konkretnie trzymać się rozwiązania szczelina plus podczerwień.
Gdyby trzymać się jednak uparcie tego, że musi być użyty silnik krokowy, to problem wykrycia ruchu przy bardzo małej prędkości można rozwiązać elastycznym sprzęgłem. Działałoby to tak: między elementem obracającym się, a osią silnika jest gumowa rurka. Powolny obrót powoduje powstanie naprężenia skręcającego i po przekroczeniu pewnego progu następuje przeskok i uwolnienie energii "skręcenia", następnie następuje ponowne "ładowanie sprzęgła elastycznego". Wiem, że to praktycznie jest bez sensu, ale teoretycznie możliwe.
Zastosowanie silnika krokowego jako "zadajnik-impulsator" jest bardzo przyjemne, w sensie odpowiedzi zwrotnej dotykowej podczas kręcenia silnikiem. Przyjemniej niż w impulsatorach, które do tej pory używałem w różnych urządzeniach. To reakcję silnika na obrót można ustawić zwierając odpowiednio cewki. Część cewek możne tym sposobem służyć jako "generator wrażenia dotykowego", a część do pomiaru.
Tak to wygląda na kieszonkowym DSO:
Ładnie, no nie?
Sądzę, że użycie silnika krokowego jako zadajnik-impulsator warto dalej rozwijać, jako liniał i enkoder nie ma sensu - są zdecydowanie prostsze sposoby.
zachowanie spokoju oznacza zdolności do działania
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
-
 Yogi_
Yogi_
- Specjalista poziom 3 (min. 600)
")
- Posty w temacie: 1
- Posty: 759
- Rejestracja: 13 sty 2010, 08:07
- Lokalizacja: Braniewo
Ale zauważ (mówimy o All..), że są te tanie mechaniczne do ~10 zł, później ok. 50-70 magnetyczne 250, 360 imp., a później to już duużo drożej.Krako pisze: Można spróbować z jakimś troszkę droższym enkoderem powiedzmy do 20 zł
myślę że nadal bardziej opłacalne niż "całe" enkodery.
Pozdrawiam
Krzysiek
Krzysiek
-
pitsa
Autor tematu - Moderator
-
Lider FORUM (min. 2000)
- Posty w temacie: 15
- Posty: 4776
- Rejestracja: 13 wrz 2008, 22:40
- Lokalizacja: PL,OP
Zdrowy zwyczaj to odpowiednio częste robienie podsumowania swoich projektów i rezygnacja z połowy z nich.
Podobnie w ramach danego projektu, z możliwych dróg rozwoju projektu też z części warto zrezygnować.
W tym wątku zamiast silnika krokowego może warto przejść na coś "normalnego", gotowego i nieco o innym zastosowaniu? Myślę o użyciu gotowego liniału do kontroli położenia i zdobyciu nowych umiejętności. Nie byłby to super precyzyjny enkoder do krokowca ale na przykład liniał do osi tokarki z odczytem w komputerze.
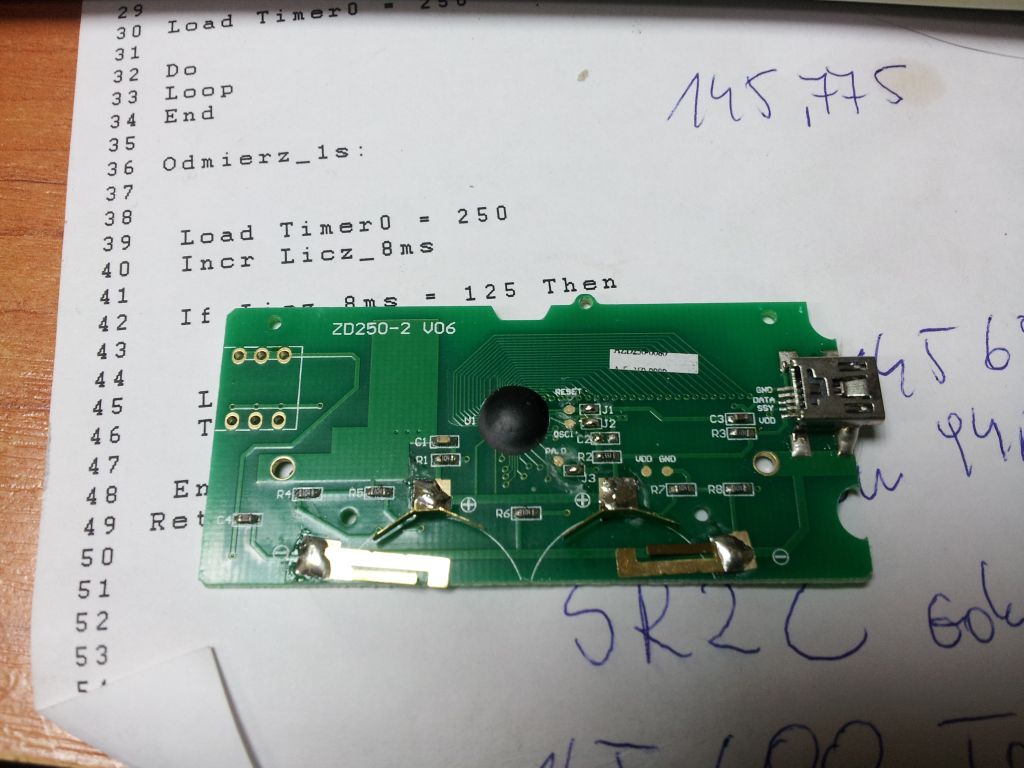
Są profesjonalne gotowce odczytów włącznie z takimi opisanymi krok po kroku:
http://www.shumatech.com/web/products/dpu-550 i otwartym oprogramowaniem: http://www.shumatech.com/web/products/opendro - w tym przypadku podane jest, że oprogramowanie pozwala nawet na odczyt z chińskich suwmiarek.
Chińskie suwmiarki przerabia się tak: http://www.shumatech.com/support/chinese_scales.htm
Warto obejrzeć:
[youtube][/youtube]
film ze strony: http://www.nerdkits.com/videos/digital_calipers_dro/
Był już na forum wątek na ten temat https://www.cnc.info.pl/topics85/dro-diy-vt6502.htm ale nie rozwinął się, chociaż temat przewijał się przez forum wielokrotnie.
Tu: https://www.cnc.info.pl/topics14/linial ... t22094.htm jest na przykład link do ciekawego prostego odczytu z suwmiarki http://www.hamradio.si/~s51kq/OSTALO.HTM (projekt TOYO).
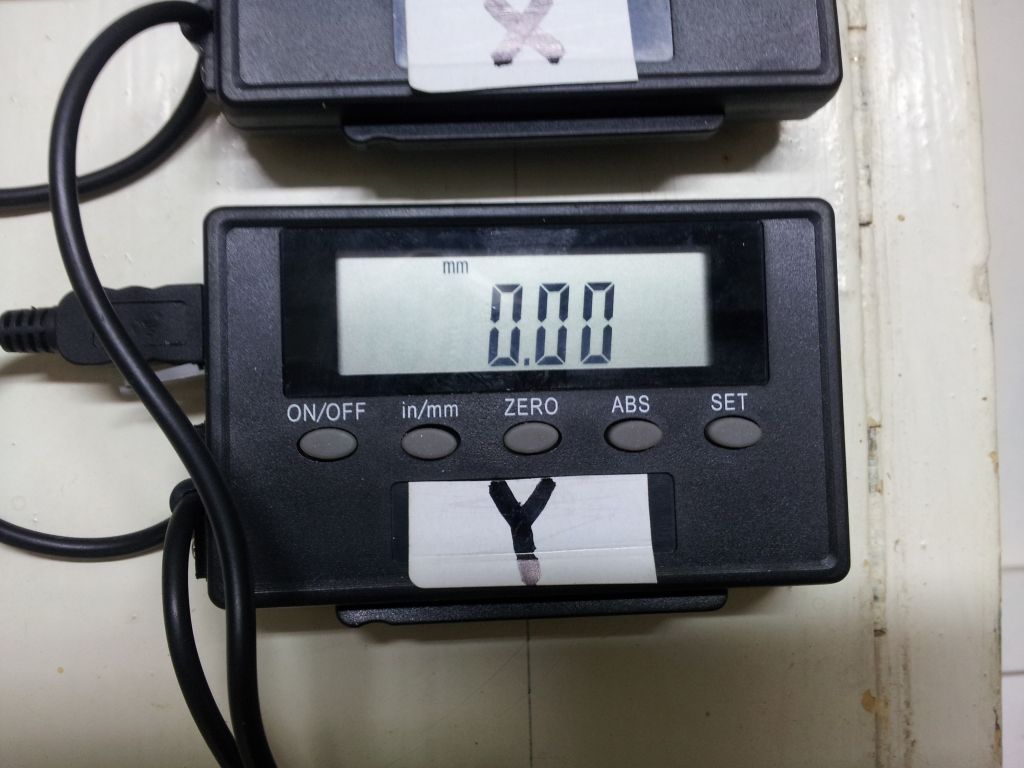
Załóżmy, że mamy gotową suwmiarkę lub liniał za 77zł z http://www.uni-max.com.pl/cyfrowy-pomia ... rsztatowe/ i jeśli da się w tym podłubać trochę mniej więcej tak: http://gardnerswebsite.com/digitalgauge/index.html to może wyszłaby z tego jakaś użyteczna zabawka z przekazywaniem odczytu do komputera (pewnie ledwie 2Hz lub 50Hz ale zawsze to coś)?
Podobnie w ramach danego projektu, z możliwych dróg rozwoju projektu też z części warto zrezygnować.
W tym wątku zamiast silnika krokowego może warto przejść na coś "normalnego", gotowego i nieco o innym zastosowaniu? Myślę o użyciu gotowego liniału do kontroli położenia i zdobyciu nowych umiejętności. Nie byłby to super precyzyjny enkoder do krokowca ale na przykład liniał do osi tokarki z odczytem w komputerze.
Są profesjonalne gotowce odczytów włącznie z takimi opisanymi krok po kroku:
http://www.shumatech.com/web/products/dpu-550 i otwartym oprogramowaniem: http://www.shumatech.com/web/products/opendro - w tym przypadku podane jest, że oprogramowanie pozwala nawet na odczyt z chińskich suwmiarek.
Chińskie suwmiarki przerabia się tak: http://www.shumatech.com/support/chinese_scales.htm
Warto obejrzeć:
[youtube][/youtube]
film ze strony: http://www.nerdkits.com/videos/digital_calipers_dro/
Był już na forum wątek na ten temat https://www.cnc.info.pl/topics85/dro-diy-vt6502.htm ale nie rozwinął się, chociaż temat przewijał się przez forum wielokrotnie.
Tu: https://www.cnc.info.pl/topics14/linial ... t22094.htm jest na przykład link do ciekawego prostego odczytu z suwmiarki http://www.hamradio.si/~s51kq/OSTALO.HTM (projekt TOYO).
Załóżmy, że mamy gotową suwmiarkę lub liniał za 77zł z http://www.uni-max.com.pl/cyfrowy-pomia ... rsztatowe/ i jeśli da się w tym podłubać trochę mniej więcej tak: http://gardnerswebsite.com/digitalgauge/index.html to może wyszłaby z tego jakaś użyteczna zabawka z przekazywaniem odczytu do komputera (pewnie ledwie 2Hz lub 50Hz ale zawsze to coś)?
zachowanie spokoju oznacza zdolności do działania
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ