



Marzy mi się zrobienie liniału na bazie Arduino. Prosta zębatka lub pasek zębaty na silniku krokowym z drukarki. Nie potrzebna wysoka dokładność tylko niezawodność urządzenia. Silnik krokowy unipolarny (cewki połączone w jednym punkcie = 5 przewodów) lub rozdzielone cewki czyli bipolarny (4 przewody).
Kręcąc silnikiem krokowym indukuje się na cewkach prąd. Im szybciej tym prąd większy. Silnik krokowy działa jak prądnica. Jak pobrać sygnał o pracy poszczególnych cewek i powstającą energię rozproszyć lub spożytkować i nie zaszkodzić wejściom do mikroprocesora?
Jak zapewnić pracę takiego liniału przy małych i dużych prędkościach?
Zamiast silnika można pewnie użyć impulsatora ale silnik krokowy ma zdecydowanie większą trwałość i wyzwanie jest o wiele ciekawsze.
[youtube][/youtube]
http://www.fleurey.com/franck/pmwiki.ph ... HDDEncoder
Silnik krokowy + mikroprocesor = liniał lub enkoder


-
 tuxcnc
tuxcnc
- Lider FORUM (min. 2000)
")
- Posty w temacie: 8
- Posty: 9874
- Rejestracja: 26 lut 2011, 23:24
- Lokalizacja: mazowieckie
Po pierwsze silnik 200 kroków/obr daje 50 imp/obr.
Czasem to wystarczy.
Po drugie indukują się wariackie napięcia.
Chciałem wykorzystać taki walający się silniczek 24V/0,21A i dostałem 250V (!!!) przy 2800 obr/min.
Po trzecie krokowiec przy małej prędkości zapewne nie wygeneruje poprawnego przebiegu kwadraturowego.
Jednak transoptory pracują też statycznie, prądnica tylko dynamicznie.
Co do konkretów, to zrobiłem coś w rodzaju podzielnicy do frezarki "Zosia".
Ma to nacinać ślimacznice.
Na wrzecionie jest zamontowany jako enkoder krokowiec NEMA17, nominalnie 3,7V/1,2A.
Przy najniższych obrotach (440?) daje 6V przy najwyższych ponad 30V.
Silnik pracuje na rezystor i przeciwrównoległe diody prostownicze.
Na diodach jest max ponizej wolta, to napięcie idzie na komparator, akurat ja użyłem LM358 z otwartą pętlą sprzężenia zwrotnego, bo mam takie wzmacniacze operacyjne na stanie.
Komparator zasilam z 5V, więc wyjście idzie bez żadnych kombinacji do chińskiego sterownika na TB6560.
Układ działa rewelacyjnie.
Problem polega na tym, że ja mam w miarę stałe obroty i tylko robię synchronizację dwóch osi.
To coś jak nacinanie gwintu na tokarce.
Ty chcesz odczytywać położenie przy zmiennej prędkości i kierunku, a tutaj krokowiec może się nie sprawdzić.
A tak w ogóle, to takich rzeczy nie robi się na Arduino za stówkę, tylko na AT89S2051 za trzy złote ...
.
Czasem to wystarczy.
Po drugie indukują się wariackie napięcia.
Chciałem wykorzystać taki walający się silniczek 24V/0,21A i dostałem 250V (!!!) przy 2800 obr/min.
Po trzecie krokowiec przy małej prędkości zapewne nie wygeneruje poprawnego przebiegu kwadraturowego.
Jednak transoptory pracują też statycznie, prądnica tylko dynamicznie.
Co do konkretów, to zrobiłem coś w rodzaju podzielnicy do frezarki "Zosia".
Ma to nacinać ślimacznice.
Na wrzecionie jest zamontowany jako enkoder krokowiec NEMA17, nominalnie 3,7V/1,2A.
Przy najniższych obrotach (440?) daje 6V przy najwyższych ponad 30V.
Silnik pracuje na rezystor i przeciwrównoległe diody prostownicze.
Na diodach jest max ponizej wolta, to napięcie idzie na komparator, akurat ja użyłem LM358 z otwartą pętlą sprzężenia zwrotnego, bo mam takie wzmacniacze operacyjne na stanie.
Komparator zasilam z 5V, więc wyjście idzie bez żadnych kombinacji do chińskiego sterownika na TB6560.
Układ działa rewelacyjnie.
Problem polega na tym, że ja mam w miarę stałe obroty i tylko robię synchronizację dwóch osi.
To coś jak nacinanie gwintu na tokarce.
Ty chcesz odczytywać położenie przy zmiennej prędkości i kierunku, a tutaj krokowiec może się nie sprawdzić.
A tak w ogóle, to takich rzeczy nie robi się na Arduino za stówkę, tylko na AT89S2051 za trzy złote ...
.
-
acetylenek
- Specjalista poziom 2 (min. 300)
")
- Posty w temacie: 1
- Posty: 577
- Rejestracja: 12 mar 2006, 21:46
- Lokalizacja: Kraków/Olkusz
Ten silnik od dysku ma w sobie czujniki hala więc cewek może tam w ogóle nie być i odczyt jest stosunkowo prosty tyle, są 3 kanały a nie dwa jak w zwykłym enkoderze inkrementalnym.
Proponuje impulsator zrobić z myszki (kulkowej) ewentualnie "słoneczko" dorobić z większą ilością promyczków (folia + drukarka laserowa).
Tylko po co ty wszystko jak enkoder 10 bitowy/ obrót z transmisją szeregową (odpada liczenie i gubienie impulsów) kosztuje chyba 150 PLN MAB25 lub SICK DGS60 inkrementalny za 200 pln.
Proponuje impulsator zrobić z myszki (kulkowej) ewentualnie "słoneczko" dorobić z większą ilością promyczków (folia + drukarka laserowa).
Tylko po co ty wszystko jak enkoder 10 bitowy/ obrót z transmisją szeregową (odpada liczenie i gubienie impulsów) kosztuje chyba 150 PLN MAB25 lub SICK DGS60 inkrementalny za 200 pln.
-
 pitsa
pitsa
Autor tematu - Moderator
-
Lider FORUM (min. 2000)
- Posty w temacie: 15
- Posty: 4480
- Rejestracja: 13 wrz 2008, 22:40
- Lokalizacja: PL,OP
Obawiam się, że największy problem, to właśnie moment rozpoczynania ruchu liniału i zatrzymania. Tu może następować przesuwanie się licznika położenia. Musiałyby być jeszcze na drodze punkty kontrolne (na przykład przejazd przez krańcówkę) do korekty położenia.
Do każdej cewki dwie mocne diody prostownicze równolegle i przeciwnie poprzez rezystor na jakiś wzmacniacz operacyjny by dostać zera i jedynki? Pewnie trudne..
A gdyby tak z cewki silnika krokowego zasilić odpowiednią cewkę, w której umieścić hallotron? Byłby to czujnik magnetoizolacyjny odporny na duże prądy i zmienne napięcia, który wykrywałby przejścia przez magnetyczne zero badanej cewki?
[ Dodano: 2012-09-13, 22:59 ]
Chcę zrobić coś w tym stylu tylko dłuższe: http://pdf1.alldatasheet.com/datasheet- ... -PM5V.html
Właśnie dziś poszło takie coś na allegro za 148zł (precyzyjny przetwornik pozycji liniowy).
Normalnie to jest powyżej 1000zł.
Do każdej cewki dwie mocne diody prostownicze równolegle i przeciwnie poprzez rezystor na jakiś wzmacniacz operacyjny by dostać zera i jedynki? Pewnie trudne..
A gdyby tak z cewki silnika krokowego zasilić odpowiednią cewkę, w której umieścić hallotron? Byłby to czujnik magnetoizolacyjny odporny na duże prądy i zmienne napięcia, który wykrywałby przejścia przez magnetyczne zero badanej cewki?
Moje doświadczenia elektroniczne są na poziomie radyjek na ul1321 made by Unitra przed pojawieniem się Atari 800XL. Wybór arduino to kwestia gotowego bajeru z dostępnymi dodatkami, małej wprawy w konstruowaniem układów elektronicznych i względnie krótszej drogi od pomysłu do realizacji. Arduino można potraktować jako szybki układ prototypowy, potem ten sam program wgrać na mikroprocesor i polutować.tuxcnc pisze: A tak w ogóle, to takich rzeczy nie robi się na Arduino za stówkę, tylko na AT89S2051 za trzy złote ...
[ Dodano: 2012-09-13, 22:59 ]
Chcę zrobić coś w tym stylu tylko dłuższe: http://pdf1.alldatasheet.com/datasheet- ... -PM5V.html
Właśnie dziś poszło takie coś na allegro za 148zł (precyzyjny przetwornik pozycji liniowy).
Normalnie to jest powyżej 1000zł.
zachowanie spokoju oznacza zdolności do działania
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
-
 markcomp77
markcomp77
- Lider FORUM (min. 2000)
- Posty w temacie: 20
- Posty: 3943
- Rejestracja: 18 wrz 2004, 12:51
- Lokalizacja: k/w-wy
- Kontakt:
enkoder z krokowca... to bardzo prosta sprawa
zbyt wysokie napięcie - załatwia rezystor + zener...
gotowce do skopiowania:
Rotary Encoder
http://www.webx.dk/oz2cpu/20m/encoder.htm
Stepper Motor As Rotary Encoder
http://www.piclist.com/techref/io/senso ... ncoder.htm
zbyt wysokie napięcie - załatwia rezystor + zener...
gotowce do skopiowania:
Rotary Encoder
http://www.webx.dk/oz2cpu/20m/encoder.htm
Stepper Motor As Rotary Encoder
http://www.piclist.com/techref/io/senso ... ncoder.htm
Ostatnio zmieniony 14 wrz 2012, 20:03 przez markcomp77, łącznie zmieniany 1 raz.
SpotkanieCNC: STOM-TOOL Marzec 2014
http://www.cnc.info.pl/topics79/spotkan ... t55028.htm
http://www.cnc.info.pl/topics79/spotkan ... t55028.htm
-
markcomp77
- Lider FORUM (min. 2000)
- Posty w temacie: 20
- Posty: 3943
- Rejestracja: 18 wrz 2004, 12:51
- Lokalizacja: k/w-wy
- Kontakt:
właściwie układ jest bardzo podobny...tuxcnc pisze:Nie podobają mi się te schematy.
U mnie wygląda to tak :
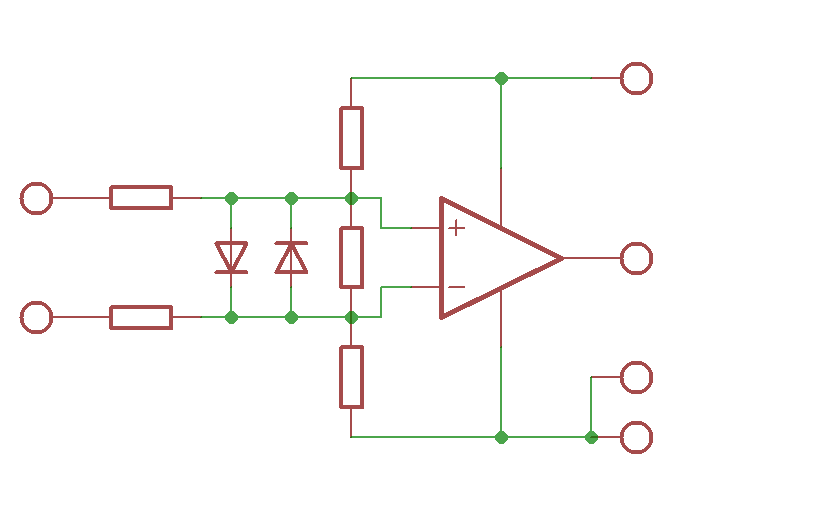
wzmacniacz ma pracować jak komparator... przerzutnik
może faktycznie, u kolegi jest bardziej elegancko rzowiązany problem polaryzacji wejść +/- wzmacniacza operacyjnego
trzeba dodać na plus -- bardziej elegancko i mniej elementów... i brak dużego kondensatora "stabilizującego" 1/2 Uzasilania
ten jeden dodatkowy rezystor na wejściu dodaje urody ze względu na pełnie symetrii...
wartość rezystoów nie ma istotnego znaczenia...
chodzi o ograniczenie strat przy cięciu zbyt wysokiego napięcia na diodach...
czyli coś koło 1k...10K
a rezystory w dzielniku i między wejściami -- to polaryzacja..
czyli coś koło 1k...10K
SpotkanieCNC: STOM-TOOL Marzec 2014
http://www.cnc.info.pl/topics79/spotkan ... t55028.htm
http://www.cnc.info.pl/topics79/spotkan ... t55028.htm
-
markcomp77
- Lider FORUM (min. 2000)
- Posty w temacie: 20
- Posty: 3943
- Rejestracja: 18 wrz 2004, 12:51
- Lokalizacja: k/w-wy
- Kontakt:
wartość napięcia między wejściami -/+ powinna być blisko 0 - w stanie równowagi...
diody zabezpieczają przez pojawieniem się tam więcej niż 0.6...0.7 (krzemowe)
rezystor tam wstawiany -- będzie decydował o czułości... o tym czy przy małej prędkości enkoder zaskoczy (bo wtedy emf będzie mała)
rezystor ten stanowi dzielnik napięcia indukowanego wraz z rezystorami zabezpieczającymi
czyli typuje w takim razie... wartośc jego na dużo więcej niż pozostałe...
diody zabezpieczają przez pojawieniem się tam więcej niż 0.6...0.7 (krzemowe)
rezystor tam wstawiany -- będzie decydował o czułości... o tym czy przy małej prędkości enkoder zaskoczy (bo wtedy emf będzie mała)
rezystor ten stanowi dzielnik napięcia indukowanego wraz z rezystorami zabezpieczającymi
czyli typuje w takim razie... wartośc jego na dużo więcej niż pozostałe...
SpotkanieCNC: STOM-TOOL Marzec 2014
http://www.cnc.info.pl/topics79/spotkan ... t55028.htm
http://www.cnc.info.pl/topics79/spotkan ... t55028.htm






