Witam
Potrzebuję manipulator jak w tytule. Na razie ma tylko złapać , przenieść i puścić element max 0.25 kg.
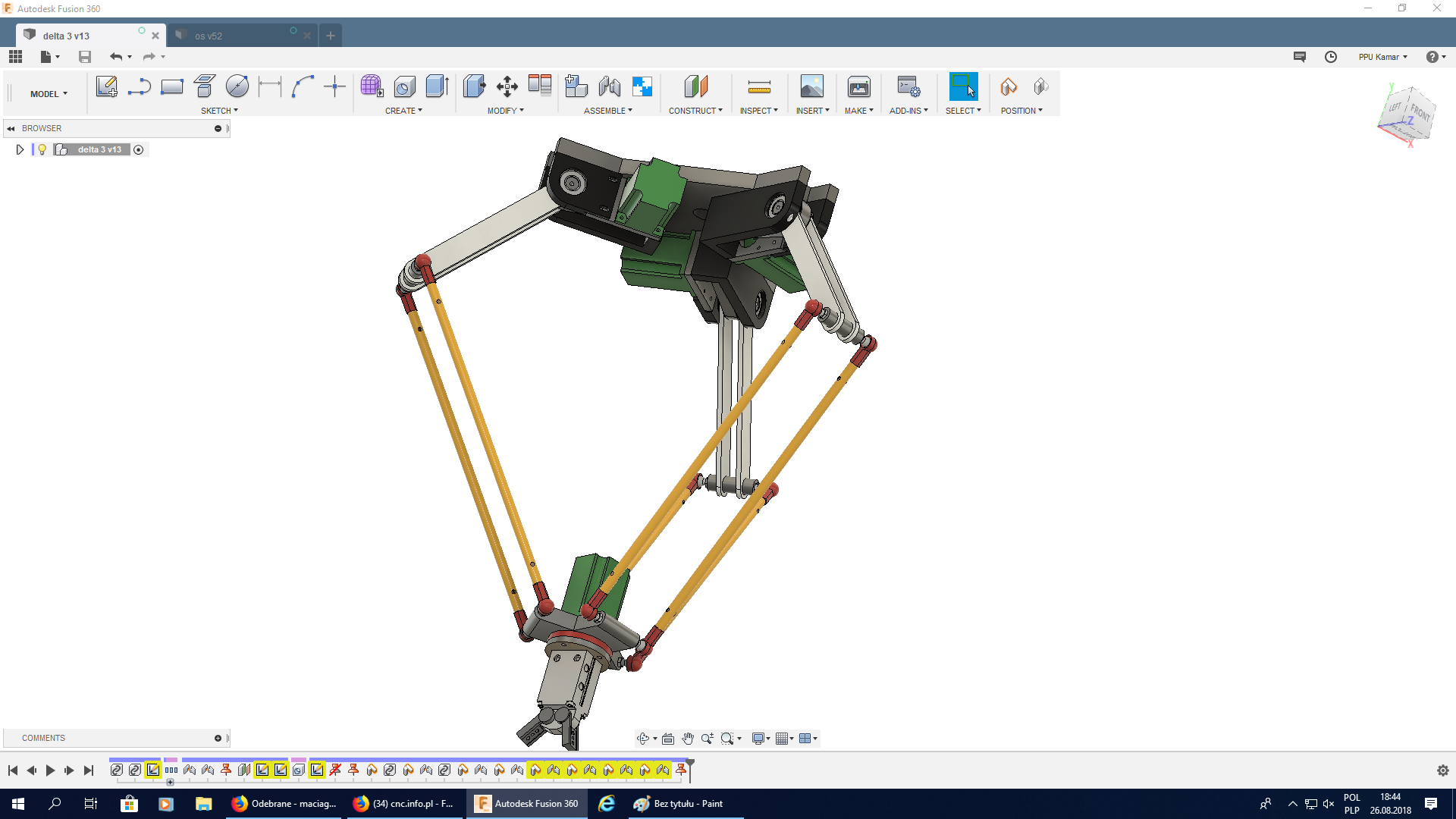
Sterowanie oczywiście linuxCNC, projekt na Fusion 360.
Postępy projektu powinny się uaktualniać tam https://a360.co/2Nigzor
Wstępna symulacja:
Prosty robot typu Delta contra kartezjański


-
 Yarec
Yarec
- Lider FORUM (min. 2000)
")
- Posty w temacie: 1
- Posty: 2112
- Rejestracja: 14 lis 2015, 10:11
- Lokalizacja: Warszawa
Re: Prosty robot typu Delta

Dodane 5 minuty 56 sekundy:
- popraw na prawidłowy znak na: — (em dash) bo głupio wygląda sentencja ModeratoraIMPULS3 pisze:—
Ale ja to się na niczym nie znam, czytać też nie bardzo - Art Tech Design
-
 Petroholic
Petroholic
- Lider FORUM (min. 2000)
- Posty w temacie: 11
- Posty: 2688
- Rejestracja: 08 gru 2015, 12:23
- Lokalizacja: Lublin
- Kontakt:
Re: Prosty robot typu Delta
Skoro Kamar chce deltę to pewnie jest to wymóg  Pick and Place albo ramię byłoby o niebo latwiejsze z kinematyką...
Pick and Place albo ramię byłoby o niebo latwiejsze z kinematyką...
A jak wiadomo Kamar sobie nie utrudnia niepotrzebnie
A jak wiadomo Kamar sobie nie utrudnia niepotrzebnie
-
kamar
Autor tematu - Lider FORUM (min. 2000)
- Posty w temacie: 81
- Posty: 17192
- Rejestracja: 18 wrz 2010, 06:17
- Lokalizacja: Kozienice
- Kontakt:
Re: Prosty robot typu Delta
Tu bym się kłócił
Prościej, ale jak to wtedy nazwać "robotem"
-
Petroholic
- Lider FORUM (min. 2000)
- Posty w temacie: 11
- Posty: 2688
- Rejestracja: 08 gru 2015, 12:23
- Lokalizacja: Lublin
- Kontakt:
-
kamar
Autor tematu - Lider FORUM (min. 2000)
- Posty w temacie: 81
- Posty: 17192
- Rejestracja: 18 wrz 2010, 06:17
- Lokalizacja: Kozienice
- Kontakt:
Re: Prosty robot typu Delta
I to właściwie wszystko w części projektowej prototypa. Po niedzieli na maszynę i oddać do testów sterowania.
-
cube000
- Specjalista poziom 1 (min. 100)
")
- Posty w temacie: 6
- Posty: 197
- Rejestracja: 18 gru 2010, 00:31
- Lokalizacja: okolice wwa
Re: Prosty robot typu Delta
Kamar, co chcesz zastosować jako przeguby ramion? Zrobiłem drukarkę delta na takich najprostszych przegubach stalowych i niestety miała dość duży luz na efektorze. Trzeba było na każdą parę ramion zastosować po dwie sprężyny ściskające aby wyeliminować luzy. Drugi błąd jaki zrobiłem to pomyliłem się przy pomiarze kąta wychylenia przegubu i w efekcie drukarka ma zmniejszone pole robocze względem zakładanego. Teraz raczej bym się w stronę przegubów z igusa kierował.
-
kamar
Autor tematu - Lider FORUM (min. 2000)
- Posty w temacie: 81
- Posty: 17192
- Rejestracja: 18 wrz 2010, 06:17
- Lokalizacja: Kozienice
- Kontakt:
Re: Prosty robot typu Delta
To zostawiłem na póżniej, sprężyny to obowiązkowo i otwarte przeguby. Na razie celuję w igusa z tworzywa a docelowo to zrobię z teflonu.