markcomp77 pisze:
wybór Arduino jako platformy rozwojowej to wina kolegi
Pitsa - nich On się tłumaczy.. On jest głównym winnym

Dobra, zaraz się wytłumaczę, ale wcześniej chciałbym podziękować koledze markcomp77 za budowanie na forum atmosfery sprzyjającej nawiązywaniu kontaktów i twórczego dzielenia się wiedzą.

Większość dużo piszących tutaj jest po prostu znawcami. To takie oczywiste wybrać sobie jakiś fajny szybki procesor, bo ma to i tamto i jest lepszy niż siamto. Kupić ten czy inny sterownik podpiąć pod komputer za 250zł, zainstalować linuksa i samo się robi. Wyobraźcie sobie jednak jak długą drogę doszliście do tej wiedzy, i jak ktoś kto nie jest w tym temacie, ma się w tym połapać? Ile lat pracy kosztowała was ta wiedza, którą się tutaj dzielicie? Ile zyskujecie dzieląc się tą wiedzą? Ja czerpię z was ile się da, a jeszcze nie doszedłem do etapu "linuxcnc ready", chociaż w linuksie siedzę od czasu slackware, instalowanego z wielu małych dyskietek na komputerze 486 dx2-66, tuż przed pojawieniem się Red Hat 4.0.
Co do Arduino to sprawa jest bardzo prosta. Kupujesz kit, piszesz parę linijek i działa. Nie trzeba robić wszystkiego od podstaw, nie trzeba męczyć się z wytrawianiem płytki lub czekaniem
14 dni na wykonanie prototypowej płytki PCB bo tak taniej, kupowaniem programatora, pamiętaniem o jakiś fusebitach..
Konkretny przykład:
https://www.cnc.info.pl/topics12/proste ... t35792.htm - wczoraj było pytanie, dziś była odpowiedź i prezentacja z użyciem Arduino do prostego sterowania. Mu tu gadu gadu, a to już jest komuś przydatne.
Arduino to łatwy początek do czegoś bardziej zaawansowanego. Tak jak użycie PikoCNC czy CNConv do sterowania maszyną CNC. Kupuje się kontroler sterownika silników krokowych z gotowym wygodnym programem. Trochę klikania i robota leci. Jak trzeba będzie przejść na więcej osi to przejście na linuxcnc będzie łatwiejsze.
Jak jest takie coś jak Arduino, łatwe do opanowania na wielu prostych przykładach dostępnych w internecie to nie ma co traktować tego z wyższością. Pobawimy się rampą to i przy okazji parę nowych osób załapie o co w tym chodzi.
[ Dodano: 2012-04-13, 21:22 ]
Yogi_ pisze:
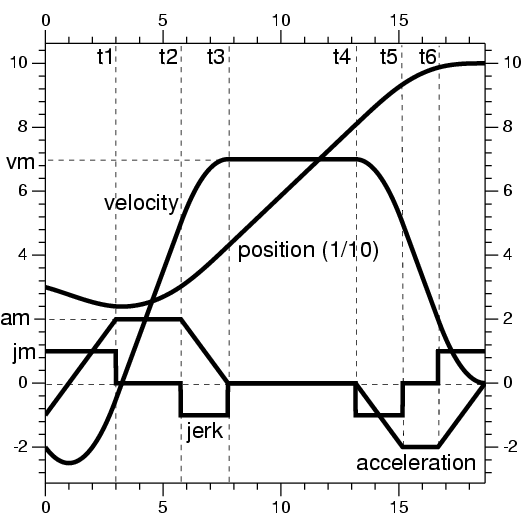
I tak się zastanawiam czy rampa liczona częścią całego czasu przejazdu to dobrze?
Zobacz ten arkusz, który tu załączyłem:
https://www.cnc.info.pl/topics65/silnik ... 539,52.htm



")



")