



")
mam wykonany własnej roboty projekt który jest co raz modyfikowany
wymiary 6000x2000 + os y wysunięta w przyszłości pod ciecie profili na obrotnicy
wszystko wykonane ze stali
będzie się poruszało na walkach podpartych
x sa20
y sa16
albo wszystko na hgw15
na walkach podpartych i na prowadnicy hgw po 2 wózki na każdą prowadnice
waga bramy około 170 kg
silniki do napędu
x
nema 42
18Nm z przełożeniem
t10/15/f2 d 45.9
na t10/32/f2 d 100
i na koło zębate m2 12 d 24
napęd przeniesiony wałkiem na 2 stronę
y
waga okolo 30kg
nema 32
4.5Nm na m1 z50 d50 os silnika 12mm i to najmniejsza zębatka jaka znalazłem na ta os
albo
nema 24 3Nm na m1 z12 d12
z
nema 24 3Nn na śrubie trapezowej 16 i skoku 4mm
zasilanie oczywiście do silników dobrane sterowniki sof start oraz moduł zasilania
transformator toroidalny 720va 2x30v
kable do silników 4x1.5 ekranowane
czujniki po jednym czujniku indukcyjnym na każdej osi
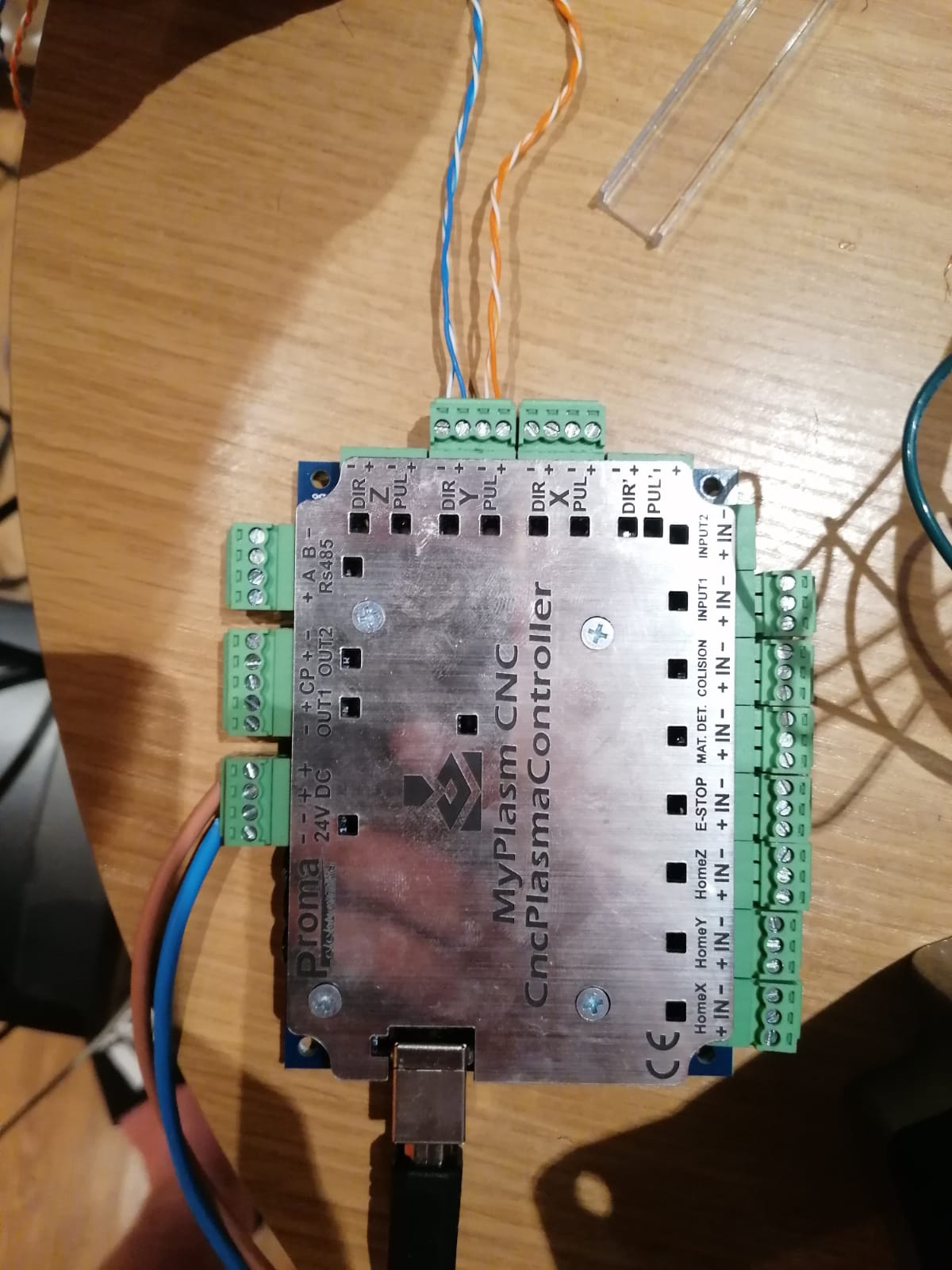
do sterowanie myplasm z thc


")

 [/img] [img]
[/img] [img]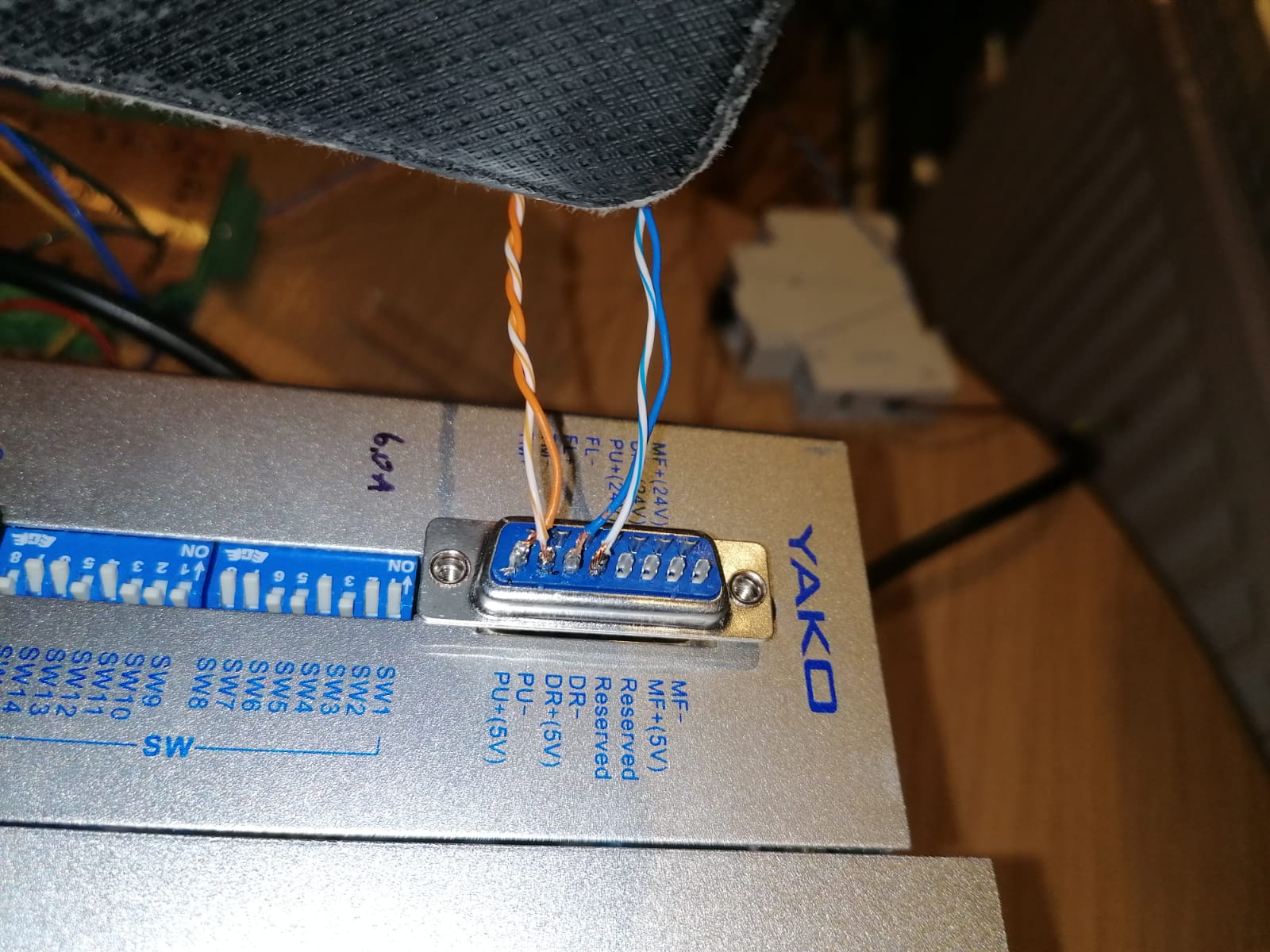 [/img] [img]
[/img] [img]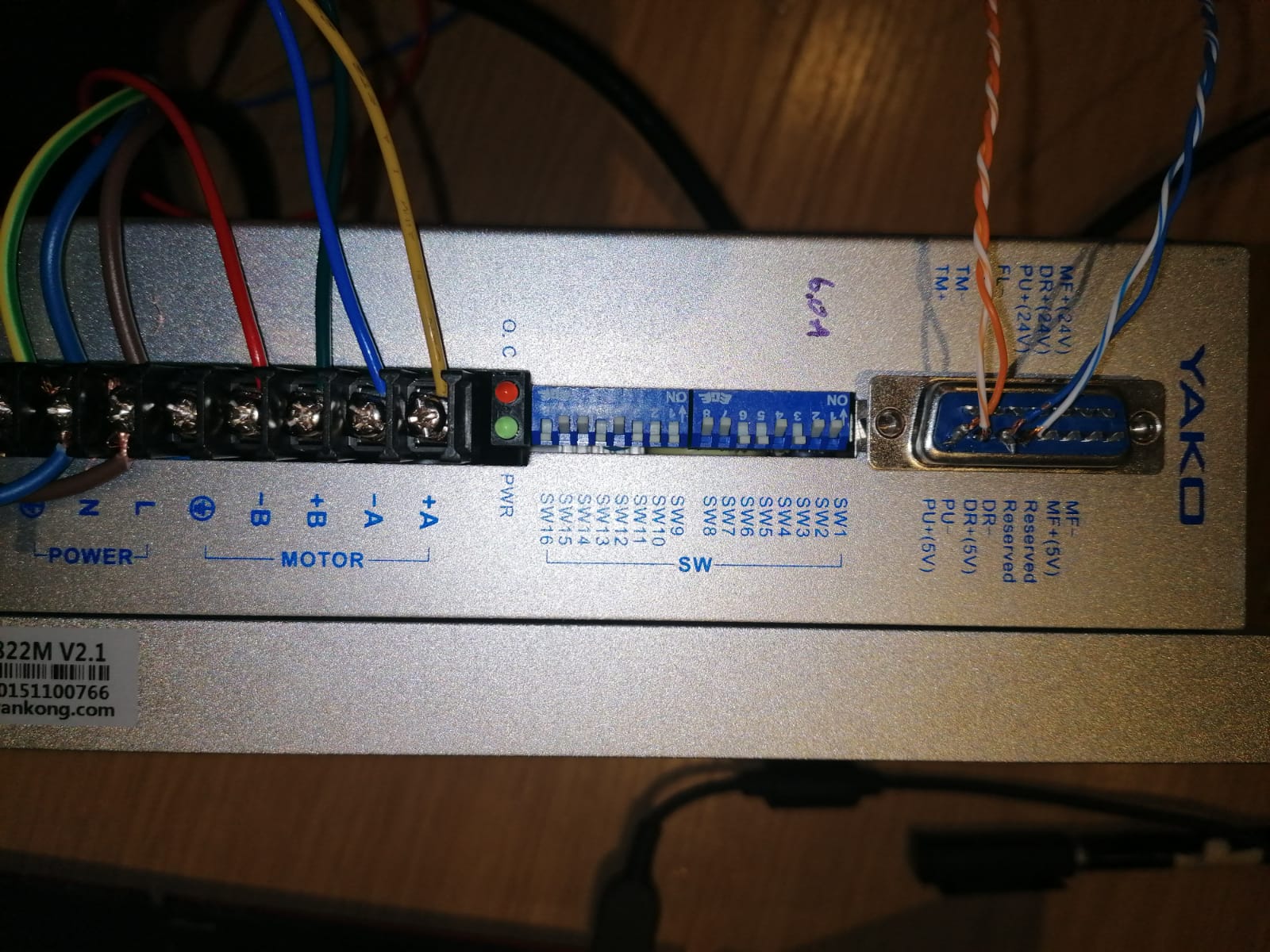 [/img] [img]
[/img] [img]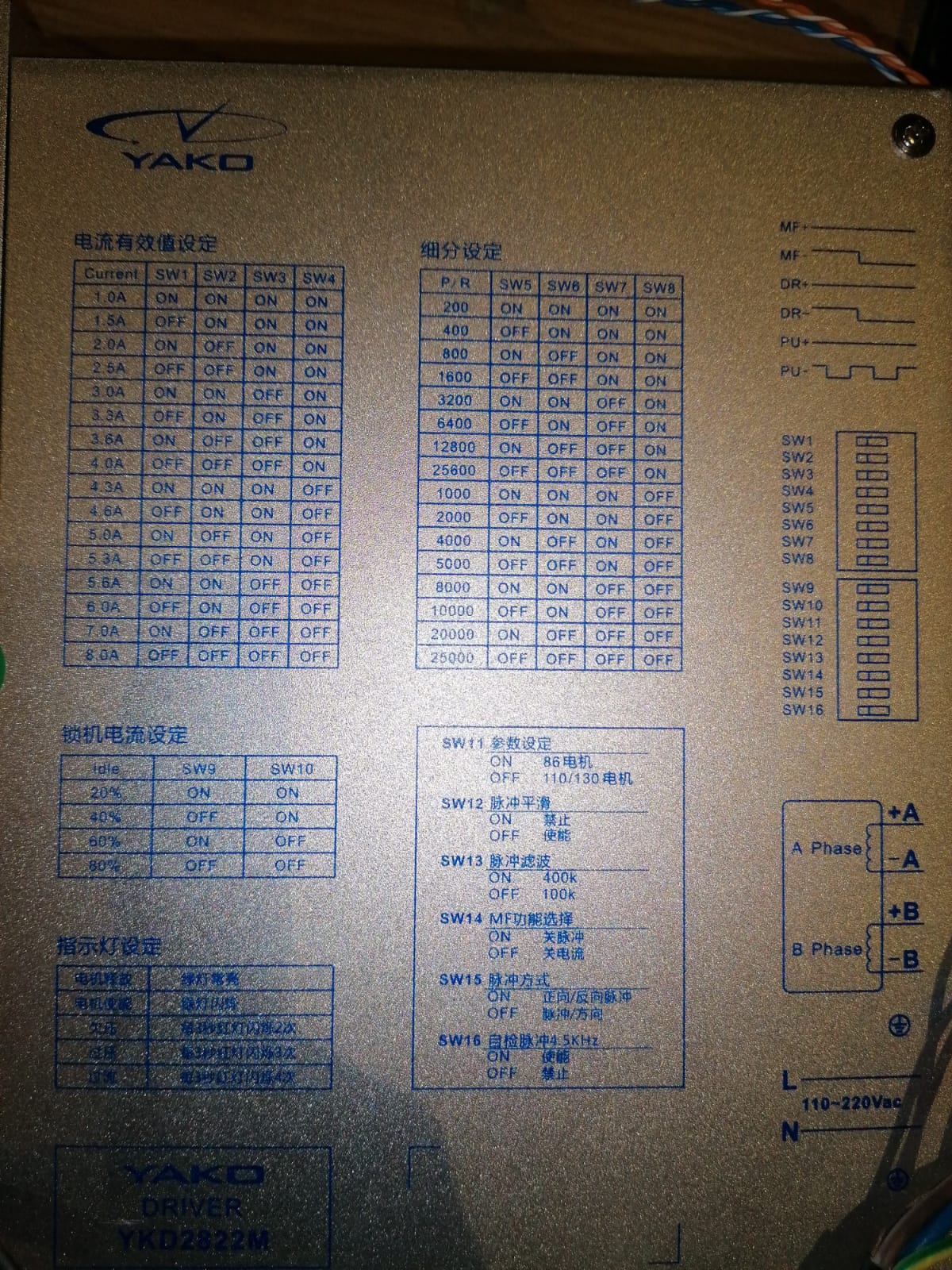 [/img]
[/img]





