")
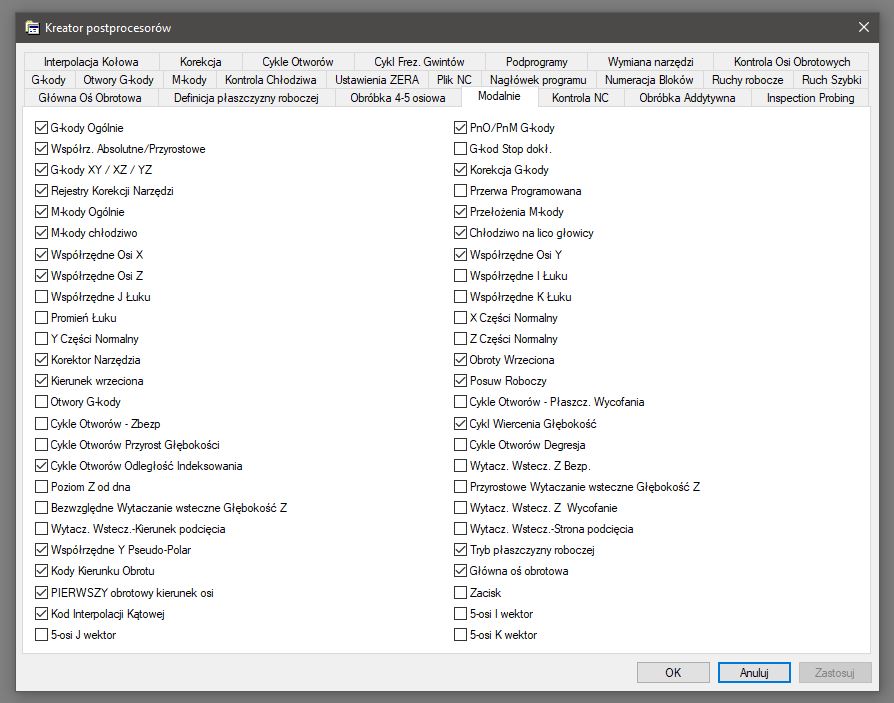
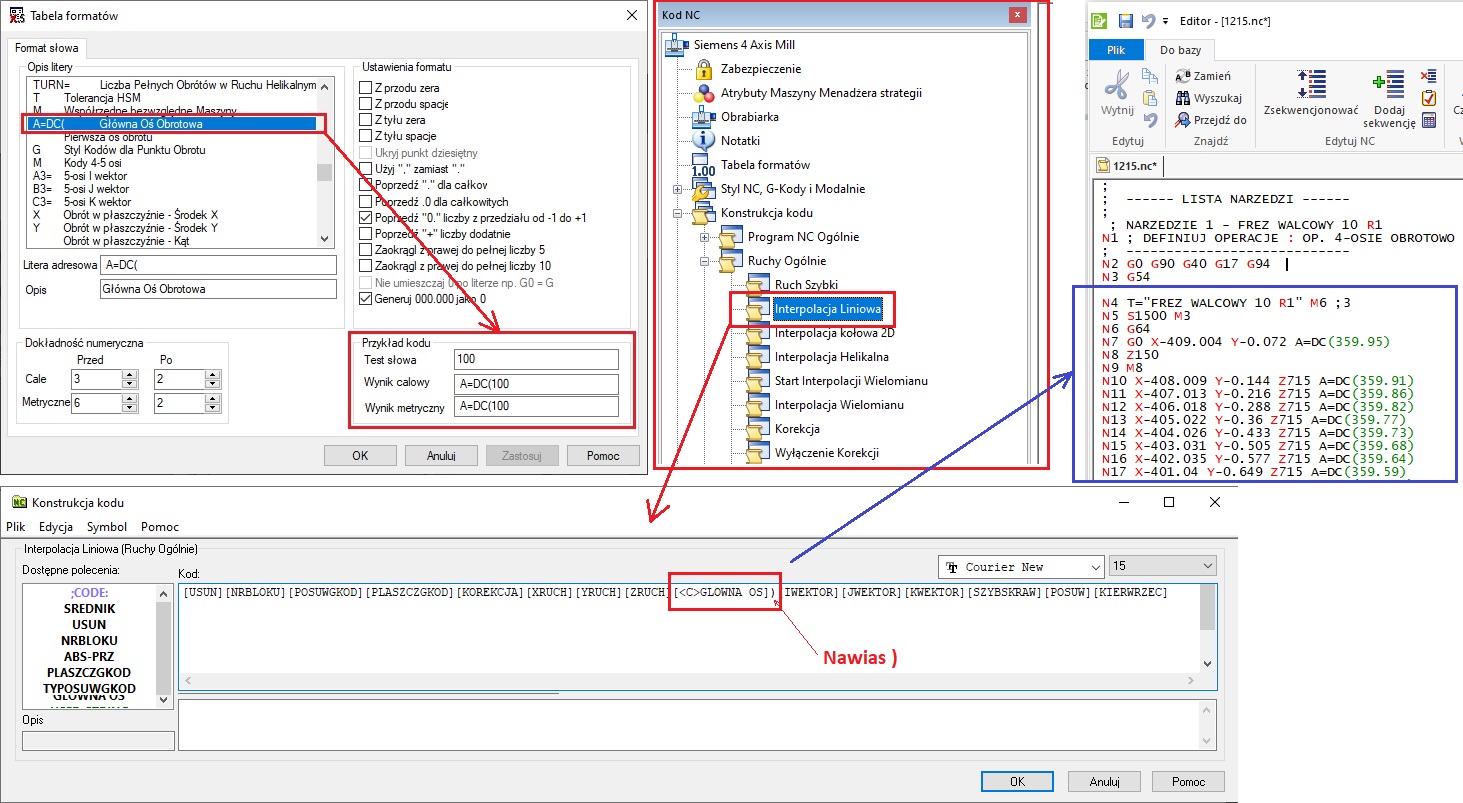
W "Tabeli formatów" wprowadź literę adresową "A=DC(".
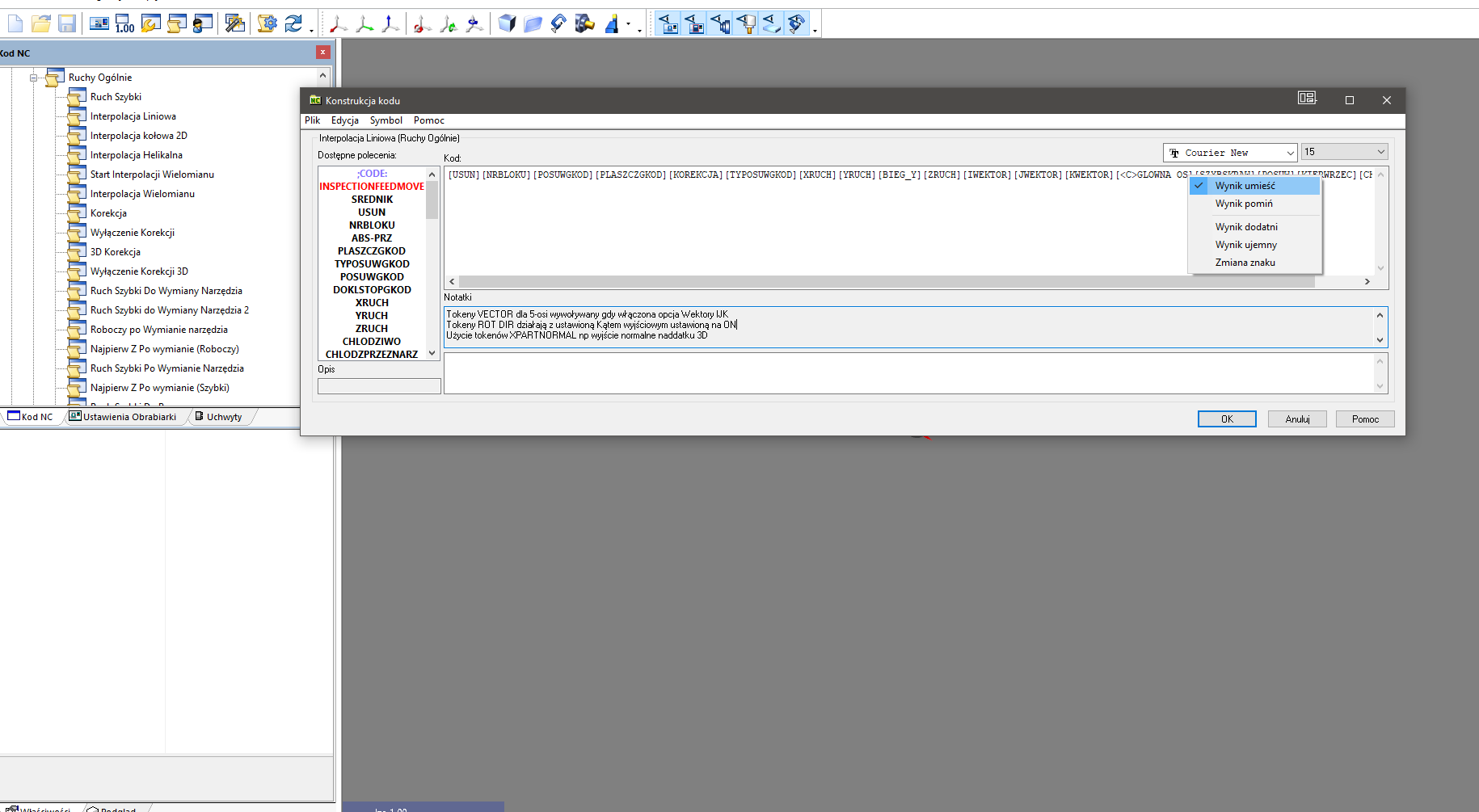
Następnie w "Konstrukcji kodu" - "Ruchy Ogólnie" - "Interpolacja Liniowa" - opisz zmienną osi obrotowej z końcowym nawiasem jako [<C>GLOWNA OS])
Jednak czy w ten sposób [<C>GLOWNA OS]) nie wymuszam za każdym razem wartości umieść wynik w interpolacji liniowej.
Czy innej możliwości jak dodać oznaczenie A=DC(kąt) nie ma.
Jak faktycznie tak będzie to zostawię sposób opisany przez "Ultras"


")