



Dorzucam do tematu link do postu od Bronsonboss na temat emc2arduino:
chinska-plyta-5-osi-t98571.html#p680012
Chodzi o możliwość komunikacji linuxcnc - arduino tak aby mieć dodatkowe piny do wyklikiwania w GUI.
https://qtpyvcp.kcjengr.com/tutorials/basic_vcp.html
optyczny przedłużacz LPT


-
 pitsa
pitsa
Autor tematu - Moderator
-
Lider FORUM (min. 2000)
")
- Posty w temacie: 11
- Posty: 4472
- Rejestracja: 13 wrz 2008, 22:40
- Lokalizacja: PL,OP
Re: optyczny przedłużacz LPT
Zamiast rozwiązywania krzyżówek na starość drążenia tematu ciąg dalszy...
Czytam o mostkach H i szukam informacji czy można hamować nimi silniki komutatorowe.
Znalazłem taki kit: https://serwis.avt.pl/manuals/AVT1825.pdf
https://ep.com.pl/artykuly/9976-Modul_P ... em_RS.html
Ma jedną wadę: "moduł zaprogramowany" a ja chcę nauczyć się samemu zaprogramować
za sterowanie odpowiada mikrokontroler Attiny24, napięcia stabilizowanego dostarcza układ 78M05, komunikacja z magistralą RS485 odbywa się poprzez układ MAX485. Elementami wykonawczymi są dwa tranzystory MOSFET-N.
Sterownie modułem odbywa się poprzez magistralę RS485 przy pomocy prostych komend. ... 0x50 0x33 0x36 0x3D 0x31 0x32 0x38 0x2C 0x30 0x0D Ustawia na wyjściu modułu o adresie 36 sygnał Pwm o wypełnieniu 50% (128/256) bez opóźnienia.
Cenowo (35zł) odpowiada mi się ten moduł z dwoma półmostkami H BTS 7960. Przykładowa aplikacja wygląda tak:
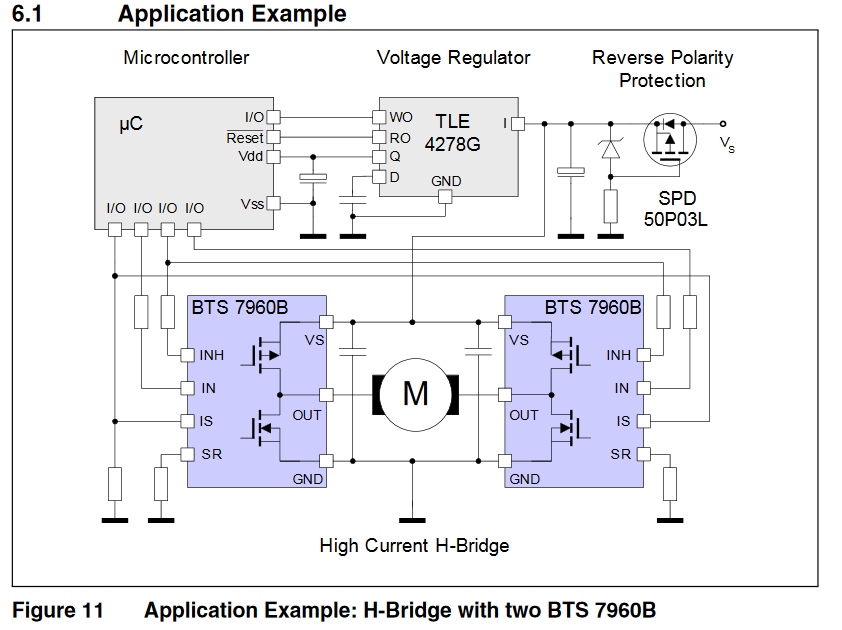
W gotowym module są 4 pinów do sterowania mostkami poprzez SNx4AHC244( Octal Buffers/Drivers With 3-State Outputs - jak to się zwie po naszemu?):
1 RPWM - Sygnał sterujący obracaniem silnika w kierunku R (PWM lub poziom)
2 LPWM - Sygnał sterujący obracaniem silnika w kierunku L (PWM lub poziom)
3 R_EN - Sygnał zezwolenia na pracę w kierunku R
4 L_EN - Sygnał zezwolenia na pracę w kierunku L
5 R_IS - Wyjście alarmu (R)
6 L_IS - Wyjście alarmu (L)
7 VCC - Zasilanie bufora wejściowego (3,3 V...5,5 V)
8 GND - Masa
Do koszyka i trzeba poeksperymentować z hamowaniem.
Czytam o mostkach H i szukam informacji czy można hamować nimi silniki komutatorowe.
Znalazłem taki kit: https://serwis.avt.pl/manuals/AVT1825.pdf
https://ep.com.pl/artykuly/9976-Modul_P ... em_RS.html
Ma jedną wadę: "moduł zaprogramowany" a ja chcę nauczyć się samemu zaprogramować
za sterowanie odpowiada mikrokontroler Attiny24, napięcia stabilizowanego dostarcza układ 78M05, komunikacja z magistralą RS485 odbywa się poprzez układ MAX485. Elementami wykonawczymi są dwa tranzystory MOSFET-N.
Sterownie modułem odbywa się poprzez magistralę RS485 przy pomocy prostych komend. ... 0x50 0x33 0x36 0x3D 0x31 0x32 0x38 0x2C 0x30 0x0D Ustawia na wyjściu modułu o adresie 36 sygnał Pwm o wypełnieniu 50% (128/256) bez opóźnienia.
Cenowo (35zł) odpowiada mi się ten moduł z dwoma półmostkami H BTS 7960. Przykładowa aplikacja wygląda tak:
W gotowym module są 4 pinów do sterowania mostkami poprzez SNx4AHC244( Octal Buffers/Drivers With 3-State Outputs - jak to się zwie po naszemu?):
1 RPWM - Sygnał sterujący obracaniem silnika w kierunku R (PWM lub poziom)
2 LPWM - Sygnał sterujący obracaniem silnika w kierunku L (PWM lub poziom)
3 R_EN - Sygnał zezwolenia na pracę w kierunku R
4 L_EN - Sygnał zezwolenia na pracę w kierunku L
5 R_IS - Wyjście alarmu (R)
6 L_IS - Wyjście alarmu (L)
7 VCC - Zasilanie bufora wejściowego (3,3 V...5,5 V)
8 GND - Masa
Do koszyka i trzeba poeksperymentować z hamowaniem.
zachowanie spokoju oznacza zdolności do działania
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
-
Bronsonboss
- Specjalista poziom 2 (min. 300)
")
- Posty w temacie: 1
- Posty: 315
- Rejestracja: 14 sty 2018, 18:27
- Lokalizacja: Cedry Wielkie
Re: optyczny przedłużacz LPT
pitsa pisze:Dorzucam do tematu link do postu od Bronsonboss na temat emc2arduino
Jak skończę z kablowaniem maszyny albo znajdę trochę czasu w pracy to spróbuję odpalić to arduino jako I/O dla linuxCNC...
Cały czas szukałem informacji i dodawałem sobie znalezione do zakładek bo do sterowania maszyną miałem dostępny tylko port LPT więc więcej niż 5 wyjść do dyspozycji nie było.. Traf chciał że kupiłem kartę Mesy... No ale że temat ciekawy, arduin kilka leży to trzeba będzie temat przebadać..
-
pitsa
Autor tematu - Moderator
-
Lider FORUM (min. 2000)
- Posty w temacie: 11
- Posty: 4472
- Rejestracja: 13 wrz 2008, 22:40
- Lokalizacja: PL,OP
Re: optyczny przedłużacz LPT
Znalazłem http://georgestone72.blogspot.com/2017/ ... duino.html - przykład użycia arduino do regulacji temperatury w drukarce 3D.
zachowanie spokoju oznacza zdolności do działania
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
Re: optyczny przedłużacz LPT
Przedłużacz lpt: Czy komunikacja ma być w dwie strony? Ile pinów? Jakie max częstotliwości sygnałów step? Chyba mam gotowy układ który by mógł to ogarnąć. W sumie wystarczy na okrągło czytać 8 bitów z portu i wysyłać jednym bajtem przez uart, drugi odbiera przez uart i wystawia to na swoim porcie. Jak ma być w dwie strony to puściłbym, osobnymi skrętkami, ten max485 kosztuje grosze, a bedzie full duplex, dużo prostrzy program i mniej czasu zmarnowane na jego wykonywanie. Jakby się uprzeć, to gejduino ma na płytce konwerter uart->usb, więc możnaby pominąć port lpt od strony komputera i emulować go w windowsie.
Co do mostka H-żeby go hamować powinien wysarczyć przekaźnik z jakimś rezystorem dla ograniczenia "sily hamowania". "Octal Buffers/Drivers With 3-State Outputs" tak jak się czyta- to poczwórny bufor/driver z wyjściami trzystanowymi.
Co do mostka H-żeby go hamować powinien wysarczyć przekaźnik z jakimś rezystorem dla ograniczenia "sily hamowania". "Octal Buffers/Drivers With 3-State Outputs" tak jak się czyta- to poczwórny bufor/driver z wyjściami trzystanowymi.
-
pitsa
Autor tematu - Moderator
-
Lider FORUM (min. 2000)
- Posty w temacie: 11
- Posty: 4472
- Rejestracja: 13 wrz 2008, 22:40
- Lokalizacja: PL,OP
Re: optyczny przedłużacz LPT
Gdybyś miał coś ciekawego dla "nowicjusza" to podziel się.
W skrócie: Idę w kierunku dodatkowych pinów poza portem LPT sterowanych z gcodu i AXIS. "Optyczny przedłużacz LPT" to taki niedościgniony dla mnie poziom umiejętności.
Między innymi chcę kręcić szybko silnikiem, w odpowiednim miejscu wyhamować. Ten moduł, który wybrałem nie ma hamowania jako tryb pracy ale będzie się dało wyhamować na chwilowym wstecznym. Tak robiłem w dwukołowym robocie na prostym DRV8835 z gotową biblioteką do arduino. Jak to nie wystarczy to poszukam innego modułu.
Podoba mi się w linuxcnc, że AXIS jest taki łatwy do ogarnięcia i da się do niego dołożyć, pokrętła, suwaki, przyciski, wskaźniki. https://www.linuxcnc.org/docs/2.4/html/hal_pyvcp.html - z tym dam sobie radę. Całej reszty jeszcze nie potrafię i małymi kroczkami uczę się i eksperymentuję. Gdy będzie coś co się nadaje to pokażę. W dalszych planach mam nauczenie się KiCada, więc to wszystko trochę potrwa.
Za radą kwarca sięgnąłem do skrzyni skarbów, w której mam sterowanie ze starej maszyny cnc (karty 8-bit XT bus z uP ATMEL 8051). Ze schematów nie byłoby tego widać ale na płytce drukowanej pooglądałem jak blisko są odpowiednie kondensatory przy układach scalonych, gdzie są filtry i jak rozdzielone od siebie różne funkcje. Znalazłem ciekawy drobiazg - watchdog i monitor zasilania w jednym - adm707 (ten watchdog prawdopodobnie robi restart mikroprocesora po określonym czasie od włączenia zasilania) i kilka kości "octal bus transceiver" i "Octal Transparent D-Type Latches With 3-State Outputs" wnioskuję z datasheets, że całe przekazywanie informacji na linie sterujące do silników krokowych idą równolegle 8-bitowo. Tyle wywnioskowałem, nie znając się na tym.
W skrócie: Idę w kierunku dodatkowych pinów poza portem LPT sterowanych z gcodu i AXIS. "Optyczny przedłużacz LPT" to taki niedościgniony dla mnie poziom umiejętności.
Między innymi chcę kręcić szybko silnikiem, w odpowiednim miejscu wyhamować. Ten moduł, który wybrałem nie ma hamowania jako tryb pracy ale będzie się dało wyhamować na chwilowym wstecznym. Tak robiłem w dwukołowym robocie na prostym DRV8835 z gotową biblioteką do arduino. Jak to nie wystarczy to poszukam innego modułu.
Podoba mi się w linuxcnc, że AXIS jest taki łatwy do ogarnięcia i da się do niego dołożyć, pokrętła, suwaki, przyciski, wskaźniki. https://www.linuxcnc.org/docs/2.4/html/hal_pyvcp.html - z tym dam sobie radę. Całej reszty jeszcze nie potrafię i małymi kroczkami uczę się i eksperymentuję. Gdy będzie coś co się nadaje to pokażę. W dalszych planach mam nauczenie się KiCada, więc to wszystko trochę potrwa.
Za radą kwarca sięgnąłem do skrzyni skarbów, w której mam sterowanie ze starej maszyny cnc (karty 8-bit XT bus z uP ATMEL 8051). Ze schematów nie byłoby tego widać ale na płytce drukowanej pooglądałem jak blisko są odpowiednie kondensatory przy układach scalonych, gdzie są filtry i jak rozdzielone od siebie różne funkcje. Znalazłem ciekawy drobiazg - watchdog i monitor zasilania w jednym - adm707 (ten watchdog prawdopodobnie robi restart mikroprocesora po określonym czasie od włączenia zasilania) i kilka kości "octal bus transceiver" i "Octal Transparent D-Type Latches With 3-State Outputs" wnioskuję z datasheets, że całe przekazywanie informacji na linie sterujące do silników krokowych idą równolegle 8-bitowo. Tyle wywnioskowałem, nie znając się na tym.
zachowanie spokoju oznacza zdolności do działania
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
-
 adam Fx
adam Fx
- Lider FORUM (min. 2000)
- Posty w temacie: 2
- Posty: 5580
- Rejestracja: 04 lip 2004, 16:03
- Lokalizacja: Gliwice
Re: optyczny przedłużacz LPT
ja też z tym walczyłem ale stanęło (brak wiedzy elektronicznej i dość pilny temat) na https://botland.com.pl/pl/sterowniki-si ... 0v20a.html być może to mostek H własnie.pitsa pisze:Czytam o mostkach H i szukam informacji
Te arduina jako wyjścia niezwykle ciekawe muszę to zgłębić.
sorki za wszystkie błędy ... (dyslektyk) 
Zobacz moje filmy http://www.youtube.com/user/pokachontass/videos
Zobacz moje filmy http://www.youtube.com/user/pokachontass/videos
Re: optyczny przedłużacz LPT
pitsa pisze:Ten moduł, który wybrałem nie ma hamowania jako tryb pracy ale będzie się dało wyhamować na chwilowym wstecznym.
Każdy mostek H ma "funkcję" hamowania, wystarczy zewrzeć oba wyprowadzenia silnika do plusa albo do masy.
adam Fx pisze:ja też z tym walczyłem ale stanęło (brak wiedzy elektronicznej i dość pilny temat) na https://botland.com.pl/pl/sterowniki-si ... 0v20a.html być może to mostek H własnie.
http://electropark.pl/drivery/1055-vnh3 ... h-30a.html ten dużo tańszy i imho lepszy.
pitsa pisze:"Optyczny przedłużacz LPT" to taki niedościgniony dla mnie poziom umiejętności.
I trochę niepotrzebny, bo po 485 wszystko działa na setkach metrów skrętki we wielu fabrykach, więc raczej nie ma sensu kombinować czegoś nowego
pitsa pisze:Między innymi chcę kręcić szybko silnikiem, w odpowiednim miejscu wyhamować.
Jak to silnik DC bez enkodera to nie da rady tak w konkretnym miejscu wyhamować, no chyba że "mniej więcej w tym miejscu" wystarczy.
pitsa pisze: Idę w kierunku dodatkowych pinów poza portem LPT sterowanych z gcodu i AXIS
No to tak się nie da, gcode są przetwarzane w programie, na port trafiają już gotowe sygnały dla sterowników.
-
pitsa
Autor tematu - Moderator
-
Lider FORUM (min. 2000)
- Posty w temacie: 11
- Posty: 4472
- Rejestracja: 13 wrz 2008, 22:40
- Lokalizacja: PL,OP
Re: optyczny przedłużacz LPT
nanab pisze:gcode są przetwarzane w programie, na port trafiają już gotowe sygnały dla sterowników.
Ale na przykład w gcode możesz mieć M3 i M7 do włączania/wyłączania wrzeciona oraz M7 i M9 do mgły lub chłodziwa wyprowadzone przez LPT do dwóch przekaźników. Podobnie w gkodzie możesz dodać własne M101-M199 i pościć je właśnie "arduinowym kanałem przez max485" lub też niezależnie od gkodu sterować parametrami pracy osprzętu maszyny cnc.
Zobacz tutaj: https://github.com/sam0737/hrepstrap
Spójrz na to okno: AXIS screenshot.png
i przeczytaj jak to jest zrobione: https://github.com/sam0737/hrepstrap/bl ... README.txt
To przykład sprzed 9 lat ale sprawdziłem instrukcję sprawdzoną przez kogoś w 2017r: http://georgestone72.blogspot.com/2017/ ... duino.html i w linuxcnc uzyskałem to samo. To jest drobnostka. Dużo trudniej rozpracować to wszystko co się dzieje w skryptach pythona itp... ale jak widać komuś coś takiego się udało.
Tu jest dużo prostsza wersja z arduino:
1. https://ckcnc.wordpress.com/2011/01/08/ ... ino-howto/
2. https://ckcnc.wordpress.com/basic-ardui ... o-example/
3. https://ckcnc.wordpress.com/basic-ardui ... no-sketch/
4. https://ckcnc.wordpress.com/basic-ardui ... mc-module/
Skrypt w pytonie, nasłuchujący arduino przez port PORT = "/dev/ttyUSB0", jest podczepiony do AXIS w custom_postgui.hal (w pliku ini swojej maszyny,w sekcji [HAL] trzeba dopisać linijkę HALUI = halui” )
W tym custom_postgui.hal tak to wygląda:
Kod: Zaznacz cały
loadusr -Wn arduino simple_arduino
#Map the machine on/off state to the arduino
net machstate arduino.machine-state <= halui.machine.is-on
#Map the switch events to the halui pins for requesting on and off
net turnoff halui.machine.off <= arduino.switch-off
net turnon halui.machine.on <= arduino.switch-on
Trochę poeksperymentować, zrozumieć o co chodzi z tymi strzałkami w HALu => <= i coś się w końcu zmajstruje. Choćby na początek w dwóch bajtach po serialu.
zachowanie spokoju oznacza zdolności do działania
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
-
pitsa
Autor tematu - Moderator
-
Lider FORUM (min. 2000)
- Posty w temacie: 11
- Posty: 4472
- Rejestracja: 13 wrz 2008, 22:40
- Lokalizacja: PL,OP
Re: optyczny przedłużacz LPT
Co za czasy!
Zamiast czytać:
http://linuxcnc.org/docs/devel/html/gui/pyvcp.html
http://linuxcnc.org/docs/devel/html/gui ... mples.html
http://linuxcnc.org/docs/devel/html/hal/basic-hal.html
można oglądać i słuchać:
.
Zamiast czytać:
http://linuxcnc.org/docs/devel/html/gui/pyvcp.html
http://linuxcnc.org/docs/devel/html/gui ... mples.html
http://linuxcnc.org/docs/devel/html/hal/basic-hal.html
można oglądać i słuchać:
.
zachowanie spokoju oznacza zdolności do działania
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ






