



Ja jestem wiekim fanem 6DOF i kiedyś jak już będę diabelsko bogaty to postawię sobie takie choćby po to, żeby się nim bawić251mz pisze:osobiście zapalam się na kinematykę SCARA
Prosty robot typu Delta contra kartezjański
-
 Petroholic
Petroholic
- Lider FORUM (min. 2000)
")
- Posty w temacie: 11
- Posty: 2688
- Rejestracja: 08 gru 2015, 12:23
- Lokalizacja: Lublin
- Kontakt:
Re: Prosty robot typu Delta


-
DOHC
- Specjalista poziom 3 (min. 600)
")
- Posty w temacie: 13
- Posty: 886
- Rejestracja: 06 kwie 2007, 19:12
- Lokalizacja: Pionki
Re: Prosty robot typu Delta
A no widzisz, też się zapaliłem kiedyś do takich ramion, myślałem o budowie lub kupnie ale po przeanalizowaniu tematu zostawiłem to "na później". Generalnie moim zdaniem nie ma sensu się do takiego czegoś zabierać bez przygotowania sterowania pozwalającego na wygodne programowanie. Do linuxa trzeba by pewnie dopisać odpowiedni komponent i by ogarnął no ale to wymaga czasu.Petroholic pisze: ↑03 wrz 2018, 09:12Tu można się zdziwić. Kupić ramię w dobrym stanie nie jest tanio, a jeśli jest w słabym stanie (jak większość tanich ramion na rynku) to koszt doprowadzenia każdego "jointa" do stanu bezluzowości może być kosmicznyDOHC pisze: Robota typu ramie pewnie taniej jest kupić do modernizacjiW przypadku kiedy ramię ma minimalne luzy na jointach nie możemy tu już mówić o żadnej dokładności... Pomijając fakt, że np. dla dużego ramienia KUKA serii KR producent deklaruje powtarzalność rzędu 0.4mm na nowym ramieniu... Po 20 latach w zakładzie na taśmie produkcyjnej parametr ten się ostro rozjeżdża... Czasami nawet do spawania jest za luzno
Swego czasu interesowałem się ramionami i zrobiłem mały wywiad dochodząc niestety do wniosku, że te wszystkie KUKI z allegro i innych portali nadają się już tylko do przeróbki na ładowacze do paletowania worków z cementem z dokładnością +/- 1cm
A test dokładności jest banalnie łatwo zrobić pod warunkiem, że sprzedawane ramię jest podpięte do prądu i sprawne. Sprzedawcy też o tym wiedzą i często programują sami test w sposób identycznych ustawień jointów na poszczególnych punktach pomiarów. Wtedy pomimo luzów robot trafia w punkty bo operuje cały czas w tym samym zakresie co w pierwszym ustawieniu. Wystarczy zadać robotowi na każdym punkcie zmianę kąta wymuszonego na jednym joincie (wtedy musi skorygować pozostałe do pozycji odpowiadającej) i już się test rozjeżdżaMożna też zadać funkcję "follow zero" i kręcić kółka wokół iglicy ale w tym teście nie sprawdzimy całego zakresu ruchu...
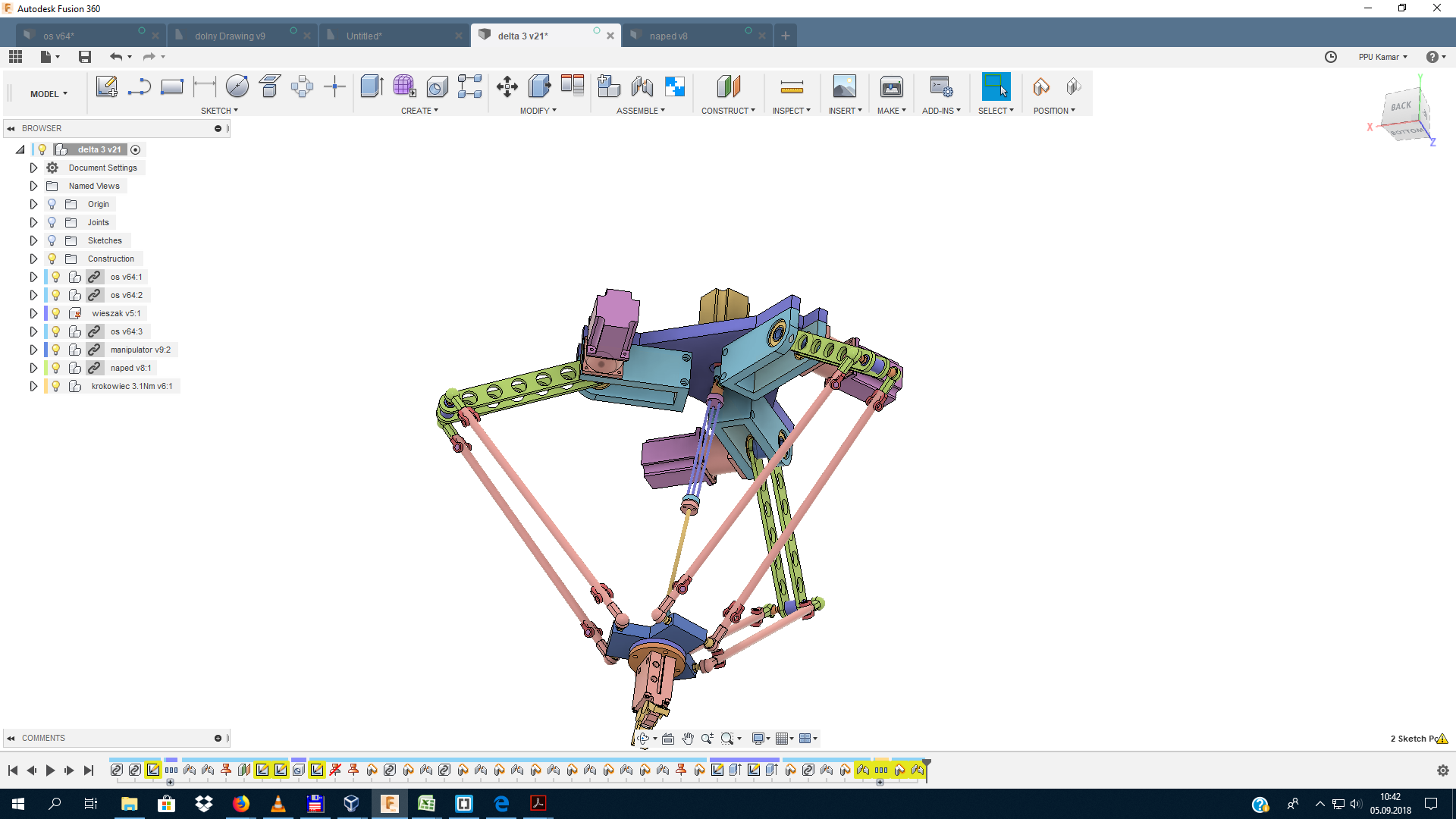
No siłę można by policzyć dla newralgicznego przypadku tzn wtedy gdy ramiona są pod kątem prostym. Zakładając że silniki to 5 NM, przełożenie to 2:1. Mamy do dyspozycji moment 10Nm w punkcie mocowania górnego ramienia. Zakładam długość górnego ramienia na 20 cm, w takim wypadku w przegubie pomiędzy ramionami mamy do dyspozycji 50 N siły której wektor leży w osi dolnego ramienia. Siła ta jest siłą wypadkową, z trygonometrii można by policzyć jaka jej część działa w kierunku pionowym czyli jest dostępna na podnoszenie ciężaru. Tak ja to widzę, są jakieś błędy wtakim toku rozumowania?251mz pisze: ↑03 wrz 2018, 09:23DOHC , też mnie to martwi , długa dzwignia zmniejsza moment.
Druga sprawa co mnie martwi to rozdzielczość na końcu ramienia , chociażby z tego względu zrobiłbym przekładnie 1:5
Ale nie ma co gdybać , ja czekam na efekty i testy , osobiście zapalam się na kinematykę SCARA i będę chciał to ogarnąć.
Pozdrawiam
-
kamar
Autor tematu - Lider FORUM (min. 2000)
- Posty w temacie: 81
- Posty: 17201
- Rejestracja: 18 wrz 2010, 06:17
- Lokalizacja: Kozienice
- Kontakt:
Re: Prosty robot typu Delta
To do dzieła, też bym chętnie coś pooglądał i pogrymasił a nie tylko słuchał
Pewnie że można , a najlepiej jakby sie dało głosem ustawiać
Pajączek czaka na paski.

-
Petroholic
- Lider FORUM (min. 2000)
- Posty w temacie: 11
- Posty: 2688
- Rejestracja: 08 gru 2015, 12:23
- Lokalizacja: Lublin
- Kontakt:
Re: Prosty robot typu Delta
Ja bym poszedł jeszcze dalej i niech nawet odpowiada na pytaniakamar pisze:Pewnie że można , a najlepiej jakby sie dało głosem ustawiać
-
 pulsa
pulsa
- Sympatyk forum poziom 2 (min. 50)
")
- Posty w temacie: 1
- Posty: 56
- Rejestracja: 16 wrz 2016, 14:01
- Lokalizacja: Bydgoszcz
Re: Prosty robot typu Delta
Pyskować? A jakby komentował robotę?
- Chyba Cię pogięło, skąd Ci to wyszło?
- Andrzej, to j*bnie...
- Zrobię to lepiej sam, odsuń się!
- Boże, widzisz i nie grzmisz.
etc. :C
- Chyba Cię pogięło, skąd Ci to wyszło?
- Andrzej, to j*bnie...
- Zrobię to lepiej sam, odsuń się!
- Boże, widzisz i nie grzmisz.
etc. :C
Zawsze bierz pod uwagę fakt, że możesz się mylić.
T. Pratchett
T. Pratchett
-
251mz
- Moderator
-
Lider FORUM (min. 2000)
- Posty w temacie: 11
- Posty: 4534
- Rejestracja: 27 sie 2004, 21:59
- Lokalizacja: Polska
Re: Prosty robot typu Delta
kamar pisze:chętnie coś pooglądał i pogrymasił a nie tylko słuchał
Też bym pooglądał jak na biurku rośnie u mnie
Niestety mam taki okres w życiu ,że czas biorę na kredyt , roboty dużo , tak ,że w ostatnim czasie nawet wszystkie retrofity w trakcie co miałem poodsprzedawałem
-
bh91
- Specjalista poziom 3 (min. 600)
- Posty w temacie: 2
- Posty: 894
- Rejestracja: 29 sty 2008, 21:00
- Lokalizacja: Radom
Re: Prosty robot typu Delta
Kamar, będziesz tam kabanoski w tej dojczlandii sortował? 
od 55 sec.
https://youtu.be/aPTd8XDZOEk?t=54s
od 55 sec.
https://youtu.be/aPTd8XDZOEk?t=54s
Jest robota - jest pinonc
-
 k-m-r1
k-m-r1
- ELITA FORUM (min. 1000)
")
- Posty w temacie: 11
- Posty: 1417
- Rejestracja: 23 cze 2008, 10:38
- Lokalizacja: OOL lub DW
- Kontakt:
Re: Prosty robot typu Delta
Czy napęd będzie bezpośredni na osi czy przekładnia?
Fajnie odchudzone ramiona. Jeszce można upchnąć mniejsze otwory pomiędzy oraz w postawie bazowej chwytaka kilka otworów.
Fajnie odchudzone ramiona. Jeszce można upchnąć mniejsze otwory pomiędzy oraz w postawie bazowej chwytaka kilka otworów.
[b]MACH3 cnc[/b]Tworzenie Makr do palników magazynków THC OHC inne[b]EKRANY dla firm producentów maszyn[/b] Budowa sprzedaż wypalarki plazma gaz obrotnice Elektrodrążarki Frezarki Tokarki Giętarki3D inne wg zlecenia 888 708 196 Tomek Komor [email protected]






