



lubię i szanuje kolegę Piotra - nie jednokrotnie mi pomógł, znam tez osobiście autorów cncgrafa, ale napisze ci krotko - lepiej przepić ta kasę większy pożytek z tego - to samo dotyczy sie g-rexapaulg pisze:W grę wchodziły 2 rozwiązania - CNCGraf wraz z płytą od kolegi piotrjub
DSPMC/IP - Ethernet Motion Controller + mach3
-
olo_3
Autor tematu - ELITA FORUM (min. 1000)
")
- Posty w temacie: 8
- Posty: 1249
- Rejestracja: 31 sie 2004, 22:25
- Lokalizacja: EU
Zwątpienie jest oznaką, że podążasz w dobrym kierunku.
Tagi:


-
 MarekM1
MarekM1
- Specjalista poziom 1 (min. 100)
")
- Posty w temacie: 1
- Posty: 142
- Rejestracja: 15 sie 2008, 15:17
- Lokalizacja: Bielsko-Biała
A może takie płytki:
01 - wejscie do modułu rozdziału/konwersji sygnałow z DSPMC
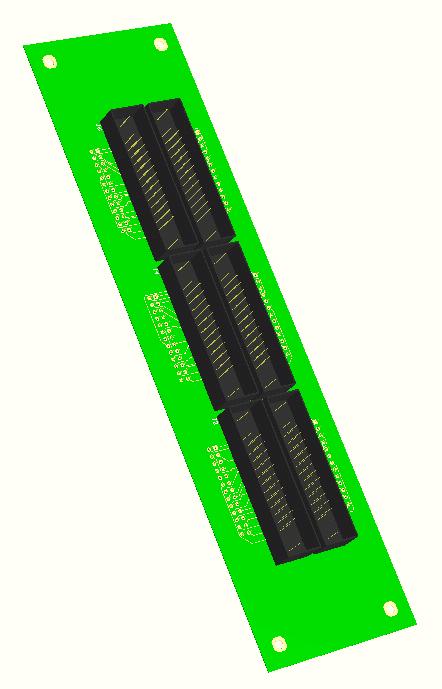
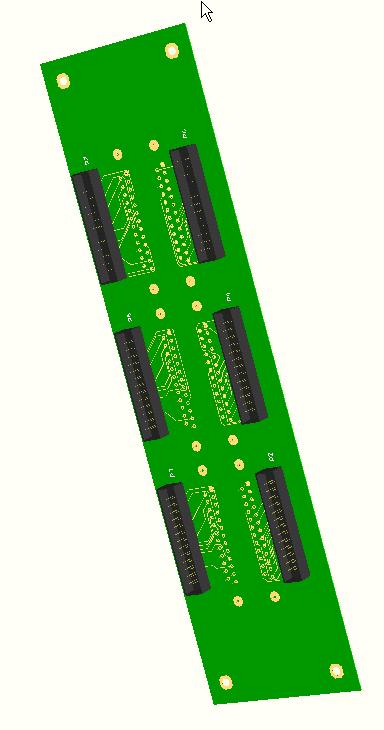
03 - wyjscia na enkodery
Projektuje wlasnie komplet do DSPMC/IP dla nieco sensowniejszego podłączania urzadzeń zewnętrznych orez konwersji poziomów sygnałów do 24V, przekaźników, styczników - no i optoizolacji. Całośc w obudowie o rozmiarach podobnych do DSPMC - czyli wysokość 238 mm, głębokość 110, a szerokosc dopiero wyjdzie.
Pewnie będą niedługo do nabycia - chętnych zapraszam na PW.
01 - wejscie do modułu rozdziału/konwersji sygnałow z DSPMC
03 - wyjscia na enkodery
Projektuje wlasnie komplet do DSPMC/IP dla nieco sensowniejszego podłączania urzadzeń zewnętrznych orez konwersji poziomów sygnałów do 24V, przekaźników, styczników - no i optoizolacji. Całośc w obudowie o rozmiarach podobnych do DSPMC - czyli wysokość 238 mm, głębokość 110, a szerokosc dopiero wyjdzie.
Pewnie będą niedługo do nabycia - chętnych zapraszam na PW.
Marek
"Diabeł jest mądry nie dlatego, że jest diabłem, tylko dlatego, że jest stary"
"Diabeł jest mądry nie dlatego, że jest diabłem, tylko dlatego, że jest stary"
-
paulg
- Specjalista poziom 3 (min. 600)
- Posty w temacie: 9
- Posty: 789
- Rejestracja: 28 paź 2005, 19:59
- Lokalizacja: Wejherowo
- Kontakt:
Witam.
Zaczyna to ładnie wyglądać.
DSPMC jest dobrym rozwiązaniem , ale niestety potrzebuje właśnie płytek o których mowa wyżej.
Zobaczymy jak całość się spisze w praktyce - a to już za niedługo powinno nastąpić
Zaczyna to ładnie wyglądać.
DSPMC jest dobrym rozwiązaniem , ale niestety potrzebuje właśnie płytek o których mowa wyżej.
Zobaczymy jak całość się spisze w praktyce - a to już za niedługo powinno nastąpić
"Tak naprawdę, to nie rozumiesz jakiegoś zagadnienia, dopóki nie potrafisz go wytłumaczyć swojej babci."
Albert Einstein
Albert Einstein
-
 Piotrjub
Piotrjub
- Moderator
-
ELITA FORUM (min. 1000)
- Posty w temacie: 7
- Posty: 1494
- Rejestracja: 11 kwie 2005, 13:00
- Lokalizacja: Gdansk
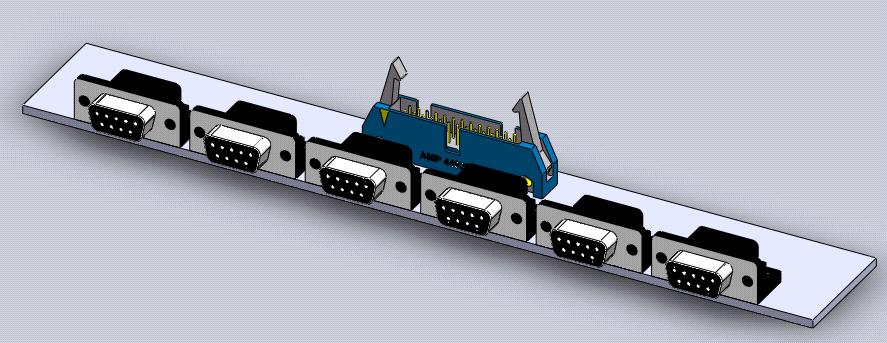
DSPMC/IP - Ethernet Motion Controller podłączamy w chwili obecnej. Skrzynkę sterowniczą skończymy w następnym tygodniu i wtedy będziemy mieli możliwość już przetestowania tego urządzenia.
- Załączniki
-
- PICT6238.jpg (151.8 KiB) Przejrzano 2008 razy
-
- PICT6237.jpg (107.82 KiB) Przejrzano 1971 razy
-
- PICT6227.jpg (207.23 KiB) Przejrzano 2008 razy

-
Piotrjub
- Moderator
-
ELITA FORUM (min. 1000)
- Posty w temacie: 7
- Posty: 1494
- Rejestracja: 11 kwie 2005, 13:00
- Lokalizacja: Gdansk
Tak jak kolega pisze Yaskawa. Problemem DSPMC/IP - Ethernet Motion Controller jest to że sygnał sterujący jest tylko +/-10V a to wymusza zastosowanie draiwera który można sterować właśnie w taki sposób. Co prawda zaprojektowaliśmy i zrobiliśmy już całkowicie od nowa napęd serwo. Jedną z najważniejszych zmian jest użycie ultra-wydajnego mikroprocesora sygnałowego DSP z wbudowanym koprocesorem zmiennoprzecinkowym. Wydajność prędkości obliczeń została dzięki temu zwiększona 50-krotnie. Obsługiwane są również silniki synchroniczne AC oraz BLDC metodami bezczujnikowymi (nie są już wymagane czujniki HALL'a). Spory zasób mocy obliczeniowej umożliwił też zastosowanie całkowicie nowych algorytmów pozycjonowania, co owocuje dużo większą precyzją pracy.
Pozostała też oczywiście możliwość współpracy z silnikami szczotkowymi DC.
Wyposażyliśmy tą wersję w wiele różnych interfejsów komunikacji. Obecnie napęd może pracować zarówno jako serwo-wzmacniacz sterowany analogowo +/-10V, pozostała również możliwość sterowania poprzez STEP/DIR.
Ponad to dostępny jest interfejs CAN, ETHERNET oraz RS485 (MODBUS/RTU).
Są też zaprojektowane różne końcówki mocy: do 1kW, do 2kW i do 4kW.
W chwili obecnej trwają jeszcze testy tego draiwera (z miesiąc na pewno jeszcze potrwają) - ten draiwer został zrobiony pod kartę podobna do DSPMC/IP - Ethernet Motion Controller aby można było sterować maszyną popularnie nazywając to poprzez kabel sieciowy (pisałem o tym w innym wątku że powoli zaczynamy i taką kartę robić).
Zdjęcie tego nowego draiwera.
Pozostała też oczywiście możliwość współpracy z silnikami szczotkowymi DC.
Wyposażyliśmy tą wersję w wiele różnych interfejsów komunikacji. Obecnie napęd może pracować zarówno jako serwo-wzmacniacz sterowany analogowo +/-10V, pozostała również możliwość sterowania poprzez STEP/DIR.
Ponad to dostępny jest interfejs CAN, ETHERNET oraz RS485 (MODBUS/RTU).
Są też zaprojektowane różne końcówki mocy: do 1kW, do 2kW i do 4kW.
W chwili obecnej trwają jeszcze testy tego draiwera (z miesiąc na pewno jeszcze potrwają) - ten draiwer został zrobiony pod kartę podobna do DSPMC/IP - Ethernet Motion Controller aby można było sterować maszyną popularnie nazywając to poprzez kabel sieciowy (pisałem o tym w innym wątku że powoli zaczynamy i taką kartę robić).
Zdjęcie tego nowego draiwera.
- Załączniki
-
- draiwer_AC_BLDC_DC.jpg (132.92 KiB) Przejrzano 1976 razy




