")
Zupełnie nie rozumiem twojego podejścia.
Zdementowałem bzdurę, którą napisałeś i tyle. Wydaje mi się, że kulturalnie.
U ciebie nie było literówki, u mnie nie było przypieprzania.
A jednoznaczne jest tylko w tedy, gdy jest zgodne z prawdą, a nie tak jak ty błędnie sobie zakodowałeś w głowie.
Przecież sam, jak twierdzisz, "stoisz na straży" konkretnych wypowiedzi i dementowania bzdur na forum publicznym, ponieważ ktoś wejdzie, przeczyta, że 100 cpr oznacza 100 kresek na tarczy i zostanie wprowadzony w błąd.
Ale jeśli będziesz miał zauważyć znak drogowy, ale będziesz sprawdzał co minutę, to jest duża szansa, że go przegapisz.
Jeśli gwintowanie rozpoczyna się od indexu, to policzmy przykładową sytuację:
Obroty 800rpm.
Jeśli sygnał index pojawił się 1 ns po wywołaniu wątku, to gdy wątek wywoływany jest co 1 ms to w zaokrągleniu za 1 ms dopiero zostanie to zdekodowane i rozpocznie się cykl.
Dla 800 rpm daje to 0,0133 obrotu, a więc 4,8 stopnia.
Jeśli będzie się zdarzać sytuacja, że index raz się pojawi tuż przed wywołaniem wątku a innym razem tuż po wywołaniu wątku, będziemy mieli około 4,8 stopnia różnicy w przejazdach, a więc gwint się rozjedzie.
Ach ta duma. Walcz z niątuxcnc pisze: ↑13 maja 2023, 15:26Tak sobie na spokojnie to przemyślałem i doszedłem do wniosku, że tam też piszą głupoty.
Raczej prawda jest taka, że błędem jest użycie pojęcia cpr do enkodera, bo "c" jest faktycznie od "counts", ale przecież enkoder niczego nie liczy, on tylko wystawia stany na wyjściach...
A pisanie o "elektronicznym mnożeniu przez cztery", to już kompletny debilizm.
Wszystko jest logiczne, CPR - counts per revolution, PPR - pulses per revolution.
Dodane 2 godziny 37 minuty 37 sekundy:
Tak jeszcze w ramach ciekawostki.
Kupiłem jakiś czas temu u chińczyka enkoder 38S6G5-B-G24N 50ppr (chińczyk podaje 50 P/R).
Chciałem 25 PPR, tak aby mieć te wcześniej tutaj wspomniane 100cpr które rzekomo miało być max dla linuxcnc - chciałem testować max, no ale 50 PPR to było najmniej co znalazłem.
No ale to było zanim jeszcze się dowiedziałem, że index jest niezbędny, więc kupiłem z wyjściami AB, bez indeksu.
Zrobiłem więc sobie w międzyczasie enkoder 100cpr na transoptorach (w sumie znalazłem fajne bardzo małe więc podam model, gdyby ktoś był zainteresowany - ITR20403) noi działa.
Chciałem sobie zrobić enkoder na enkoderze magnetycznym AMS (mam kilka sztuk, kiedyś wysyłali sample, nie wiem czy nadal wysyłają) + uc do konfigurowania ale mi się nie chciało, więc zostało na transoptorach szczelinowych.
Enkoder na transoptorach szczelinowych nie jest idealny, z tego względu, że okienko transoptora ma pewną szerokość, stąd ciężko uzyskać przebiegi o wypełnieniu 50% i idealne przesunięcie fazowe 90 pomiędzy AB. Jeśli przebiegi nie są "książkowe", to maksymalna prędkość obrotowa jaką da się zmierzyć przy danej częstotliwości próbkowania również spada.
Dlatego zdecydowanie lepszym rozwiązaniem jest użycie układu scalonego (np. enkoder magnetyczny z odpowiednim wyjściem lub inny układ, który te sygnały wygeneruje).
Dziś z ciekawości rozkręciłem enkoder od chińczyka, odnalazłem całkiem ciekawą płytkę w środku.
PCB ma wyprowadzony również sygnał Z, ale chińczyk nie dolutował kabelka.
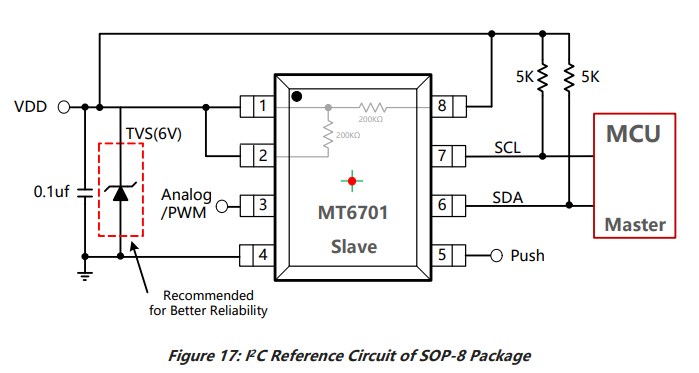
Na PCB siedzi układ MagnTek MT6701 - enkoder magnetyczny, który ma między innymi wyjścia ABZ a rozdzielczość jest programowana w zakresie 1 - 1024 Pulses per Revolution (PPR).
Całkiem fajny scalak.