



Dzień dobry,
Jestem w trakcie budowy plotera CNC.
Konstrukcja opiera się o gotowe 1,5m prowadnice liniowe z napędem paskowym wraz z silnikami Nema34 (1,8st.12Nm).
Niestety układ mechaniki wymusza zastosowanie dość sporego podziału kroku.
Na podstawie średnicy kół zębatych w napędzie paskowym obliczyłem, że zakupiona przeze mnie mechanika ma pewną wadę patrząc na założenia CNC -> na jeden krok silnika przypada 1,5mm posuwu w osi Y.
Wynikiem tej sytuacji jest konieczność podziału kroku.
1/32 -> 0,05 mm (na mikrokrok)
1/64 ->0,025 mm (na mikrokrok)
...
Moje pytania do Was są takie:
1. Jak dokładne jest pozycjonowanie uzyskane przez mikrokrok. Czy podział na 32, 64, 125, 250 ma sens?
Posiadam sterownik Wantai DQ860MA - producent deklaruje możliwość maksymalnego podziału kroku na 250 (50000 kroków).
2. Pytanie jaki podział ma sens w moim przypadku?
Ponieważ mam już skompletowaną mechanikę odrzućmy póki co takie możliwości jak zastosowanie przekładni/innego koła zębatego.
Dodam, że silnik ma (chyba) spory na moje potrzeby ma zapas 12Nm - napędza oś Y więc przesuwa oś X o wadze ok. 45kg (to jest zapas prawda?).
Pozdrawiam
bpetera
Podział kroku, a dokładność - konstrukcja wymusza mikrokrok
Mechanika daje posuw 1,5mm na pełny krok.


-
zibi
- ELITA FORUM (min. 1000)
")
- Posty w temacie: 1
- Posty: 1280
- Rejestracja: 24 lut 2007, 15:20
- Lokalizacja: podkarpackie
Re: Podział kroku, a dokładność - konstrukcja wymusza mikrokrok
Coś pomyliłeś chyba bo na jeden krok silnika nie może przypadać 1.5mm tylko na jeden obrót silnika.
Wiec jak silnik ma 200 kroków na obrót a dajesz podział 32 to masz 200*32=6400 kroków.
Jeśli śrubę masz o skoku np. 5mm to 6 6400/5=1280. Do macha wpisujesz 1280 kroków na 1mm przesunięcia.
Wiec jak silnik ma 200 kroków na obrót a dajesz podział 32 to masz 200*32=6400 kroków.
Jeśli śrubę masz o skoku np. 5mm to 6 6400/5=1280. Do macha wpisujesz 1280 kroków na 1mm przesunięcia.
NX CAD, NX CAM, FREZOWANIE 5AX, ELEKTRODRĄŻARKI WGŁĘBNE I DRUTOWE. PEPS, VERICUT. Pomagam w NX przez Team Viewer. Postprocesory NX.
-
dudziak4
- Specjalista poziom 3 (min. 600)
")
- Posty w temacie: 1
- Posty: 717
- Rejestracja: 06 wrz 2007, 13:30
- Lokalizacja: Bielawa
Re: Podział kroku, a dokładność - konstrukcja wymusza mikrokrok
No nie do końca jeśli koło pasowe ma około 96mm średnicy i silnik jest połączony bezpośrednio bez żadnego przełożenia wtedy jeden obrót silnika robi nam przesuw ~`300mm a to jest 300mm/200kroków = 1,5mm na jeden krok. Jeśli masz tak połączony silnik z kołem pasowym to jak mam być szczery wątpię żeby ci momentu na tym silniku wystarczyło. Najprostsze przełożenie 1:2 podwoi ci ten moment.Coś pomyliłeś chyba bo na jeden krok silnika nie może przypadać 1.5mm
-
mareq_bb
- Specjalista poziom 1 (min. 100)
- Posty w temacie: 2
- Posty: 246
- Rejestracja: 26 wrz 2016, 14:10
- Lokalizacja: Bielsko-Biała
Re: Podział kroku, a dokładność - konstrukcja wymusza mikrokrok
Obstawiam, że sam napęd paskiem na 1,5m prowadnicy ma luz większy niż te 0,05mm więc nie ma co szaleć z większym podziałem niż 1/32.
-
 zacharius
zacharius
- Lider FORUM (min. 2000)
")
- Posty w temacie: 1
- Posty: 2558
- Rejestracja: 04 paź 2007, 01:32
- Lokalizacja: Kraków
- Kontakt:
Re: Podział kroku, a dokładność - konstrukcja wymusza mikrokrok
ta, Zibi nie doczytał ze mowa jest o pasku.
Bpetera:
przy takim momencie silnika to pytanie raczej brzmi na ile dokładnie jest zrobiony.
krokówka jest dość dokładna w 4ch pozycjach. 0, 90, 180 i pełny obrót. reszta to się waha.
zacząłbym od podziału 64 i zobaczył w praniu jak to wyjdzie,
aczkolwiek pierwsze to bym zamienił paski na śruby ale to zależy co chcesz na tej maszynce robić, jak jest do pcb to może coś z tego będzie ale do malutkich pcb SMD to może być słabe rozwiązanie na pasku.
Bpetera:
przy takim momencie silnika to pytanie raczej brzmi na ile dokładnie jest zrobiony.
krokówka jest dość dokładna w 4ch pozycjach. 0, 90, 180 i pełny obrót. reszta to się waha.
zacząłbym od podziału 64 i zobaczył w praniu jak to wyjdzie,
aczkolwiek pierwsze to bym zamienił paski na śruby ale to zależy co chcesz na tej maszynce robić, jak jest do pcb to może coś z tego będzie ale do malutkich pcb SMD to może być słabe rozwiązanie na pasku.
Nie otrzymasz koni wyścigowych krzyżując dwa osły
-
ajt
- Specjalista poziom 1 (min. 100)
- Posty w temacie: 3
- Posty: 126
- Rejestracja: 23 sty 2009, 19:21
- Lokalizacja: Radom
Re: Podział kroku, a dokładność - konstrukcja wymusza mikrokrok
Też uważam, że podział 1/32 to max. Choćby z tego względu, że mikrokroki nie będą równe. Często bywa tak, że w ramach jednego pełnego kroku np. kilka pierwszych mikrokroków będzie krótszych, potem dłuższe, a potem znów krótsze. W efekcie gdzieś "po drodze" błąd pozycjonowania może się okazać nawet większy niż 1/32. Producenci sterowników oczywiście starają się minimalizować to zjawisko, odpowiednio dobierając parametry dla poszczególnych mikrokroków, ale dla przypadkowej pary silnik+sterownik może wyjść różnie. Reasumując, podział większy niż 1/32 nie ma sensu 
Druga sprawa, to opisany napęd będzie zdecydowanie za słaby. 300mm na obrót, to 1,5mm na krok. Promień koła około 48mm, czyli maksymalna siła, z jaką silnik 12Nm będzie ciągnął pasek, to tylko 250N. To bardzo mało, bramę da się zatrzymać ręką. Przy lekkiej bramie do plazmy czy lasera, powinno być ok, ale jak brama ma kilkadziesiąt kg, to przyspieszenia wyjdą takie sobie. W dodatku napęd będzie bardzo "miękki", tzn. do wypchnięcia silnika z kroku wystarczy właśnie te 250N. Nie następuje to od razu, tzn. pchając bramę siłą 250N przesuniemy ją o mniej więcej odległość jednego kroku i dopiero wtedy silnik przeskakuje. Czyli wpychając narzędzie w materiał z siłą zaledwie 25N, powodujemy przesunięcie o 0,15mm. Marnie to widzę, chyba że do miniaturowych frezów do pcb, jak wspomniano wyżej, no ale silnik 12Nm i brama 45kg sugerują, że to raczej coś większego ma być
Tutaj aż się prosi o przełożenie chociaż 1:10. Co wtedy zyskujemy: 30mm na obrót (nadal bardzo dużo), siłę na pasku 2500N, która przy 0,15mm/krok da 100 razy "sztywniejszy" napęd.
Jeśli przekładnia jest wykluczona, to może chociaż jak najmniejsze koło, a do tego przełożenie 1:2 na pasku, co pozwoliłem sobie naszkicować modyfikując rysunek pojawiający się czasem na forum: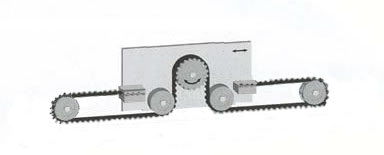
Aha, doczytałem w innym wątku, że to chyba do lasera ma być. Druga część mojego posta dotyczy raczej jakiegoś plotera do mdf itp, więc w tym kontekście nie bardzo ma zastosowanie (z wyjątkiem wzmianki o kiepskim przyspieszeniu).
Druga sprawa, to opisany napęd będzie zdecydowanie za słaby. 300mm na obrót, to 1,5mm na krok. Promień koła około 48mm, czyli maksymalna siła, z jaką silnik 12Nm będzie ciągnął pasek, to tylko 250N. To bardzo mało, bramę da się zatrzymać ręką. Przy lekkiej bramie do plazmy czy lasera, powinno być ok, ale jak brama ma kilkadziesiąt kg, to przyspieszenia wyjdą takie sobie. W dodatku napęd będzie bardzo "miękki", tzn. do wypchnięcia silnika z kroku wystarczy właśnie te 250N. Nie następuje to od razu, tzn. pchając bramę siłą 250N przesuniemy ją o mniej więcej odległość jednego kroku i dopiero wtedy silnik przeskakuje. Czyli wpychając narzędzie w materiał z siłą zaledwie 25N, powodujemy przesunięcie o 0,15mm. Marnie to widzę, chyba że do miniaturowych frezów do pcb, jak wspomniano wyżej, no ale silnik 12Nm i brama 45kg sugerują, że to raczej coś większego ma być
Tutaj aż się prosi o przełożenie chociaż 1:10. Co wtedy zyskujemy: 30mm na obrót (nadal bardzo dużo), siłę na pasku 2500N, która przy 0,15mm/krok da 100 razy "sztywniejszy" napęd.
Jeśli przekładnia jest wykluczona, to może chociaż jak najmniejsze koło, a do tego przełożenie 1:2 na pasku, co pozwoliłem sobie naszkicować modyfikując rysunek pojawiający się czasem na forum:
Aha, doczytałem w innym wątku, że to chyba do lasera ma być. Druga część mojego posta dotyczy raczej jakiegoś plotera do mdf itp, więc w tym kontekście nie bardzo ma zastosowanie (z wyjątkiem wzmianki o kiepskim przyspieszeniu).
Za to z powyższym może być problem. 250N siły na pasku i 45kg masy daje przyspieszenie zaledwie około 5m/s^2. Bardzo mało dynamiczne to wychodzi, a gdzie indziej piszesz, że zależy Ci a na dużych przyspieszeniach. Jednak przełożenie tak z 1:10 i tu powinno dać bardzo wyraźną poprawę.
-
bpetera
Autor tematu - Czytelnik forum poziom 3 (min. 30)
")
- Posty w temacie: 10
- Posty: 32
- Rejestracja: 16 mar 2018, 11:12
- Lokalizacja: Łódź
Re: Podział kroku, a dokładność - konstrukcja wymusza mikrokrok
Docelowo ma to być mały Waterjet do cięcia pianek (ciśnienie do kilkuset bar), mam też głowicę laserową więc póki co na potrzeby testów to ona jest podłączona do osi Z.
Sama wymiana kółka w napędzie paskowym jest kłopotliwa ponieważ jest to gotowy, zamknięty napęd.
Średnica koła pasowego przystosowana jest do obudowy całego napędu - jeżeli je zmniejszę pas będzie obcierał się o wewnętrzne prowadzenie pasa. Wolałbym nie ruszać tego zamkniętego napędu i załatwić "dokładność obrotu" przed nim.
Liczyłem jednak, że nie będzie trzeba dalej inwestować w mechanikę tej konstrukcji. Wszystko jest pospawane i zmontowane bez większych luzów. Myślałem też o przeniesieniu napędu na wał przez dodatkowy pasek i mniejsze koła pasowe, ale to w zbyt małym stopniu naprawia obecny problem.
Chyba jednak zastosowanie przekładni byłoby najwygodniejszym rozwiązaniem. Problem w tym, że (co widać na zdjęciach) napęd bramy mam przeniesiony przez obustronne wyprowadzenie wału z silnika krokowego. Zapewne musiałbym wtedy dokupić kolejny silnik i łącznie 3 przekładnie tak aby każda prowadnica posiadała osobny silnik z przekładnią, albo chociaż trzy przekładnie (dwie na Y).
Eh, poszukam u chińczyka może znajdę coś tanio - przekładnie 10:1, 15:1, 20:1, 30:1?
Wywalenie tego durnego paska i wstawienie odpowiednich śrub załatwiło by problem i zapewne poprawiło sztywność napędu, ale to koszty, a przede wszystkim sporo pracy i zmian.
Sama konstrukcja (elementy pospawane i pomalowane) nie jest mojego autorstwa - odkupiłem ją od faceta, który budował plazmę, ale ostatecznie poległ na elektronice (a może to był kit..).


Sama wymiana kółka w napędzie paskowym jest kłopotliwa ponieważ jest to gotowy, zamknięty napęd.
Średnica koła pasowego przystosowana jest do obudowy całego napędu - jeżeli je zmniejszę pas będzie obcierał się o wewnętrzne prowadzenie pasa. Wolałbym nie ruszać tego zamkniętego napędu i załatwić "dokładność obrotu" przed nim.
Liczyłem jednak, że nie będzie trzeba dalej inwestować w mechanikę tej konstrukcji. Wszystko jest pospawane i zmontowane bez większych luzów. Myślałem też o przeniesieniu napędu na wał przez dodatkowy pasek i mniejsze koła pasowe, ale to w zbyt małym stopniu naprawia obecny problem.
Chyba jednak zastosowanie przekładni byłoby najwygodniejszym rozwiązaniem. Problem w tym, że (co widać na zdjęciach) napęd bramy mam przeniesiony przez obustronne wyprowadzenie wału z silnika krokowego. Zapewne musiałbym wtedy dokupić kolejny silnik i łącznie 3 przekładnie tak aby każda prowadnica posiadała osobny silnik z przekładnią, albo chociaż trzy przekładnie (dwie na Y).
Eh, poszukam u chińczyka może znajdę coś tanio - przekładnie 10:1, 15:1, 20:1, 30:1?
Wywalenie tego durnego paska i wstawienie odpowiednich śrub załatwiło by problem i zapewne poprawiło sztywność napędu, ale to koszty, a przede wszystkim sporo pracy i zmian.
Sama konstrukcja (elementy pospawane i pomalowane) nie jest mojego autorstwa - odkupiłem ją od faceta, który budował plazmę, ale ostatecznie poległ na elektronice (a może to był kit..).
Ostatnio zmieniony 11 kwie 2018, 13:35 przez bpetera, łącznie zmieniany 2 razy.
-
ajt
- Specjalista poziom 1 (min. 100)
- Posty w temacie: 3
- Posty: 126
- Rejestracja: 23 sty 2009, 19:21
- Lokalizacja: Radom
Re: Podział kroku, a dokładność - konstrukcja wymusza mikrokrok
No to w Y zamiast tego silnika pośrodku dać jedną długą oś. W miejsce silnika łożysko zamocowane tam, gdzie teraz silnik plus koło zębate, a silnik z drugim kółkiem gdzieś niżej.
-
bpetera
Autor tematu - Czytelnik forum poziom 3 (min. 30)
- Posty w temacie: 10
- Posty: 32
- Rejestracja: 16 mar 2018, 11:12
- Lokalizacja: Łódź
Re: Podział kroku, a dokładność - konstrukcja wymusza mikrokrok
No, to faktycznie jest rozwiązanie. Bardziej ekonomiczne od przekładni, ale za to więcej pracy. O ile dobrze rozumiem będzie trzeba zamówić nowy wał i zrobić odpowiednie elementy mocujące do silnika dystansujące go odpowiednio względem wału z kołem zębatym. Muszę to poważnie rozważyć bo to najmniej bolesne kosztowo, da efekt, a ilość pracy akceptowalna. W takim przypadku jakie koła powinienem wybrać?
Można jeszcze zamiast kół zębatych zrobić przeniesienie krótkim paskiem na wał przez odpowiednie koła pasowe - to pewnie gorsze od zębatek ale chyba tańsze?
Idąc w stronę przekładni to koszt 3 chińskich 10:1/20:1 to około 500$, do tego skrócenie wału - cała operacja z cłem to około 2,5 tyś
-
ajt
- Specjalista poziom 1 (min. 100)
- Posty w temacie: 3
- Posty: 126
- Rejestracja: 23 sty 2009, 19:21
- Lokalizacja: Radom
Re: Podział kroku, a dokładność - konstrukcja wymusza mikrokrok
Skrót myślowy - pisząc o kołach zębatych miałem na myśli koła pasowe z paskiem zębatym - takie HTD 5M z paskiem o szerokości 15mm powinny być akurat. Co do przełożenia, to może jeszcze ktoś się wypowie, ale może aż 1:10 w tym przypadku nie będzie konieczne. 1:4 da się uzyskać z większym kołem o niezbyt dużej średnicy. Np. duże koło 60 zębów, małe 15. Wtedy wypadnie 75mm na obrót silnika. Nadal sporo, ale może starczy. Wtedy podobne koło by się zmieściło w osi X zamiast sprzęgła. Ewentualnie dać różne przełożenia w X i Y. W Y, gdzie trzeba wozić ciężką bramę, zapewniając duże przyspieszenie, dać 1:10, a w X 1:4, bo sam wózek z laserem waży niewiele. Albo nawet na początek przerobić tylko Y, bo w X dynamika może się okazać niezła w obecnym rozwiązaniu, a mikrokroki zapewnią wystarczającą dokładność
No i jeszcze wracając do tych mikrokroków: schodzenie poniżej 1/32 nie ma sensu ze względu na dokładność, ale za to da płynniejszy ruch i mniejsze schodki, więc z tego względu warto spróbować.
No i jeszcze wracając do tych mikrokroków: schodzenie poniżej 1/32 nie ma sensu ze względu na dokładność, ale za to da płynniejszy ruch i mniejsze schodki, więc z tego względu warto spróbować.




