Mmikrokrok stosuje się po to żeby silniki płynniej pracowały i nie był tak bardzo dokuczliwy problem mechanicznego rezonansu wirnika. Bez mikrokroku to właściwie przy pewnej prędkości obrotowej silnika jest on niezwykle słaby i bardzo szybko wypada z synchronizmu.
Czoper prądowy stosuje się po to żeby sterownik zasilić wyższym napięciem. Jak wiesz standardowy silnik ma 200 kroków na obrót. Jeżeli chcesz nim obracać z wysoką prędkością (jak na krokowy silnik) powiedzmy 10obr/s to prąd w cewkach trzeba przełączać niezwykle często. Cewka ma indukcyjność jak zapewne wiesz, więc po przyłożeniu napięcia prąd który wychodzi z prawa ohma nie popłynie od razu. Potrzebuje czasu żeby osiągnąć tą wartość docelową. Przy szybkim przełączaniu cewek silnika te narastanie prądu trwa zbyt długo i średni prąd w czasie poszczególnych cewek jest poniżej znamionowego. A to oznacza, że na wyższych obrotach silnik traci moment. Jest po protu słabszy im się szybciej kręci.
Dzięki zastosowaniu czopera możemy podawać na silnik wysokie napięcie. Gdy narośnie ono do wartości znamionowej to czoper pilnuje żeby dalej już on nie rósł, bo spaliłoby to silnik. Więc mamy szybkie narastanie i osiąganie prący znamionowego, co pozwala szybko kręcić silnikiem bez straty momentu.
Marność mojego układu polegała na tym, że nie miałem rampy rozpędzającej i hamującej. Więc przy podaniu od razu impulsów określonej częstotliwości wirnik musi się zacząć tak kręcić. Jak wiemy wszystko ma swoją bezwładność i przy zbyt dużej częstotliwości było to po prostu nie możliwe. Prosta jakaś funkcja zmieniająca częstotliwość impulsów dała trzykrotny przyrost max obrotów.
Druga sprawa to zrobiłem jedynie półkrok, bo nie miałem możliwości płynnego panowania nad prądem cewek.
Trzecia sprawa to zasilałem silnik z 5V, więc przy wyższych obrotach prąd nie zdążył narastać.
Ale to tak jak mówię. To na szybko na płytce stykowej było zlepione.
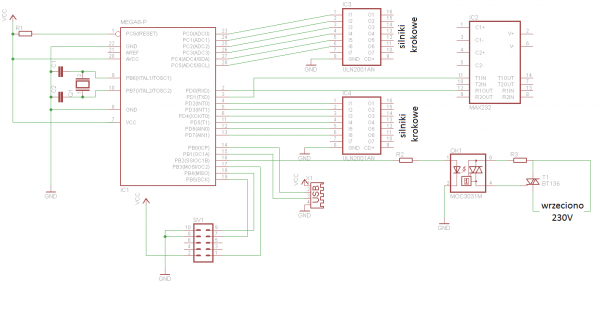
Najlepiej zbudować sobie dwa mostki H. Po jednym na każde uzwojenie silnika i do tego stopień mocy każdego mostka zasilać przez jeszcze jeden tranzystor. Będzie to jednocześnie czoper i mikrokrok.
Jak tranzystory dobierać to nie wiem. Nie jestem nawet elektronikiem

Przy tych prędkościach to w sumie każdy się wyrobi. Prąd oczywiście trzeba dobrać odpowiedni. Jak zasilisz sterownik z 50V, a silnik znamionowe napięcie ma 5V i 2A to przy 50V będzie 20A. I takie szpilki prądowe myślę, że trzeba brać pod uwagę. A prawdopodobnie nawet wyższe ze względu na indukcyjność. Ja ostatnio gdzie mi trzeba to wsadzam IRL8113. Do tego drivery potrzebne żeby je szybko przełączać. Ja ostatnio testowałem TC427. Nie wiem czy to dobry. Działa i tani

Na twoim rysunku nie ma drivera. Mosfeta atmegą nie zdążysz szybko przełączać, a na bipolarnym będziesz miał duże straty i też do wysterowania potrzebujesz dodatkowego tranzystora.
Aha, czoper w sterownikach silników krokowych nie działa jak klasyczny tryb CC w zasilaczu na wzmacniaczu operacyjnym. Tu działa to jakby cyfrowo. Po podaniu napięcia na cewkę, prąd narasta, a płynie jeszcze przez rezystor mocy. Adc próbkuje napięcie odłożone na tym rezystorze i jeżeli osiągnie wartość max to odłączany jest tranzystor. Prąd spada i jak spadnie poniżej poziomu pewnego to tranzystor jest znów załączany. Działa on więc jako klucz. I tak przynajmniej 100 000 razy na sekundę.
To tak jakby użyć komparatora, a na jego wyjście podłączyć bramkę tranzystora. A z kolei napięcie odniesienia podawać mu z dac procka.
Uff, ale się napisałem




")



")
")

")






