")
Bardzo potrzebuje waszej pomocy, bo sam sobie nie poradzę
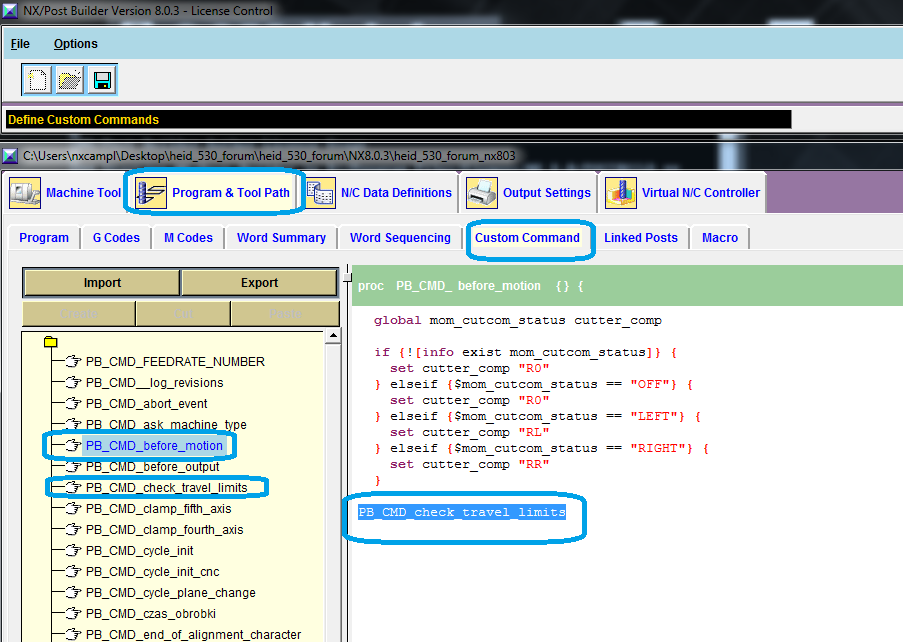
Od kilku dni walczę z Post Builderem, stworzyłem sobie postprocesor do obsługi 4 osi, ale problem polega na tym że cokolwiek zmienię w specyfikacji kinematycznej (Fourth Axis) nie mogę później wygenerować kodu, otrzymuję komunikat z NX:
Wyjście
Received an error 177002
Nazwa pliku ...\mom_tcl_definitions.c, numer linii: 505
Kominikat błędu: Error received in do_event. Event Handler: C:\Program Files\...\postprocesor\MILOO_4axis.tcl, Event name: MOM_before_motion, See syslog for more
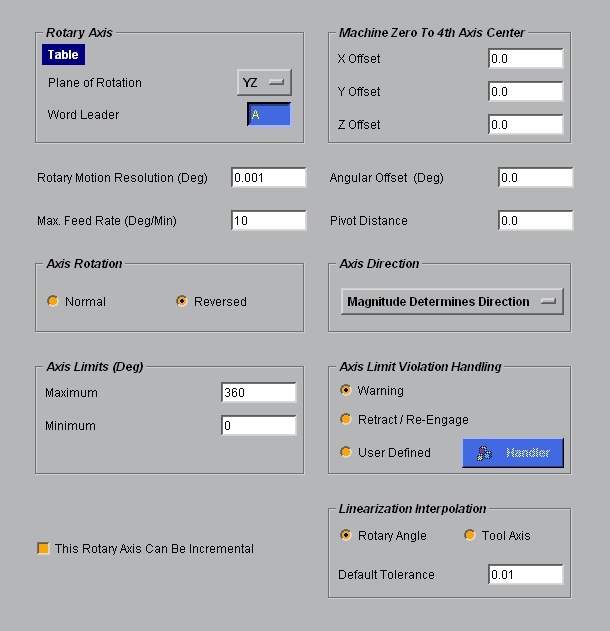
Sterowanie maszyny to LinuxCNC, zauważyłem że sterowanie osi A jest inne jak w przypadku przemysłowej obrabiarki. Gdy zapodaję komendę G0 A350, a następnie A0 to oś wykonuje pełny obrót do współrzędnej A0.
Na obrabiarce przemysłowej te same komendy powodują że A dąży do A0 po najkrótszej drodze.
Wygenerowany kod w momencie przekraczania współrzędnej A0 wykonuje pełny obrót (np. następujące po sobie A356.5 A.058) gdzie na obrabiarce przemysłowej takiego zjawiska nie ma.
Teraz nie wiem czy to kwestia sterowania, czy należy wykonać postprocesor który uwzględni taką pracę osi A, gdzie nie będą generowane współrzędne jak w/w?
Moja wiedza przy edycji czy tworzeniu postprocesora jest bardzo mała i sprawia mi to duży problem, czy ktoś z kolegów wesprze mnie w tej walce
Link do tematu: LINK


")
")