")
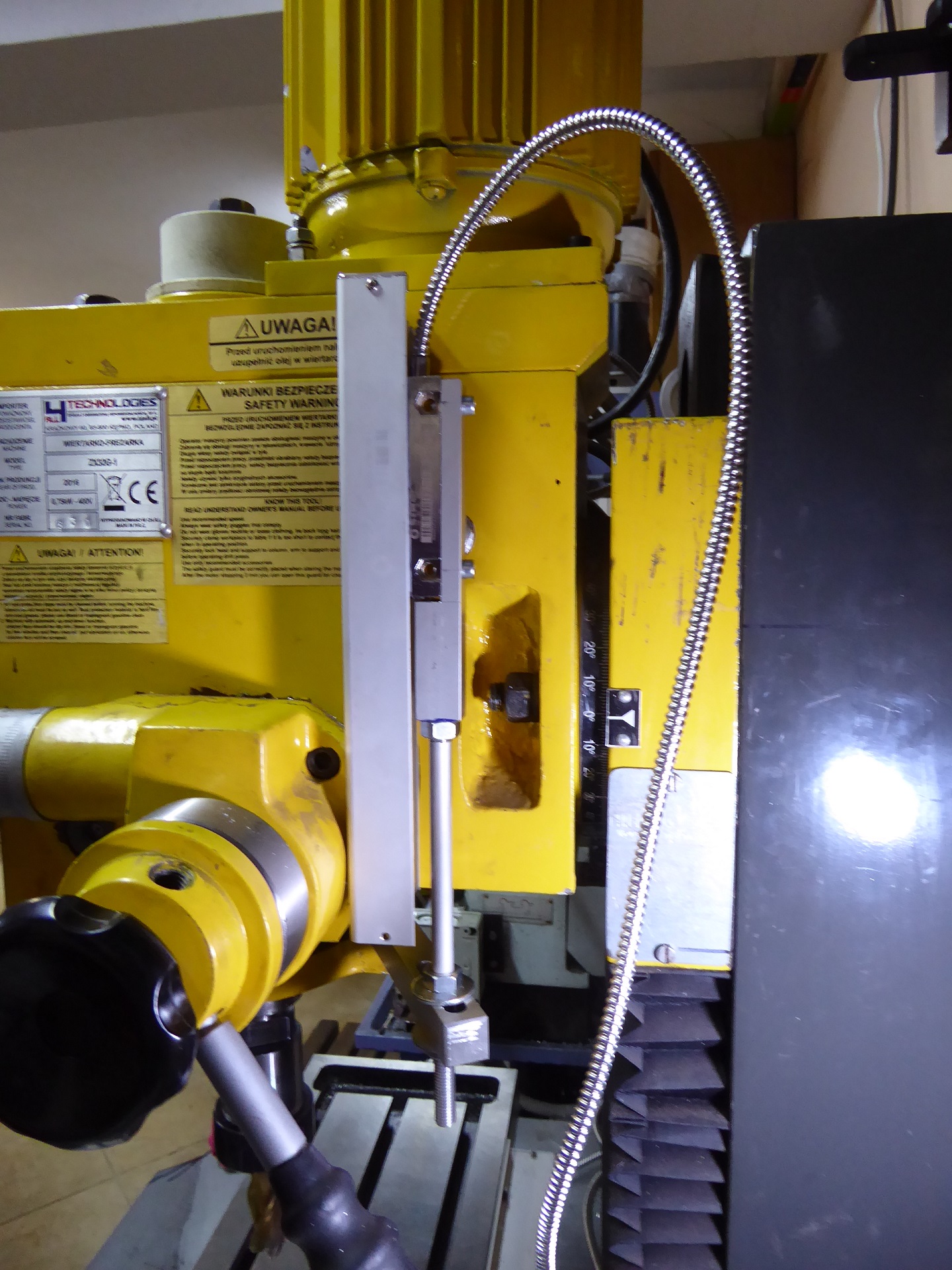
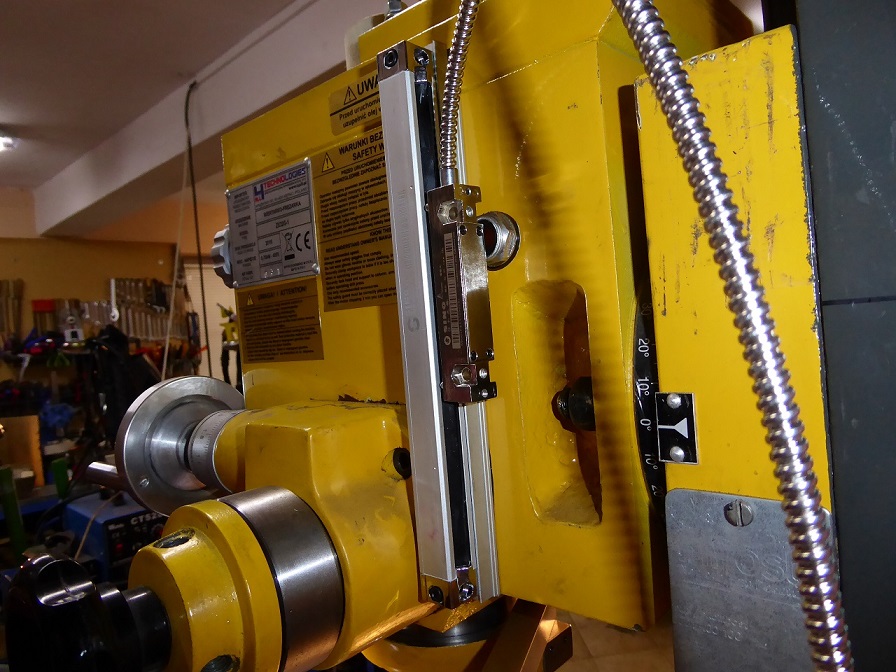
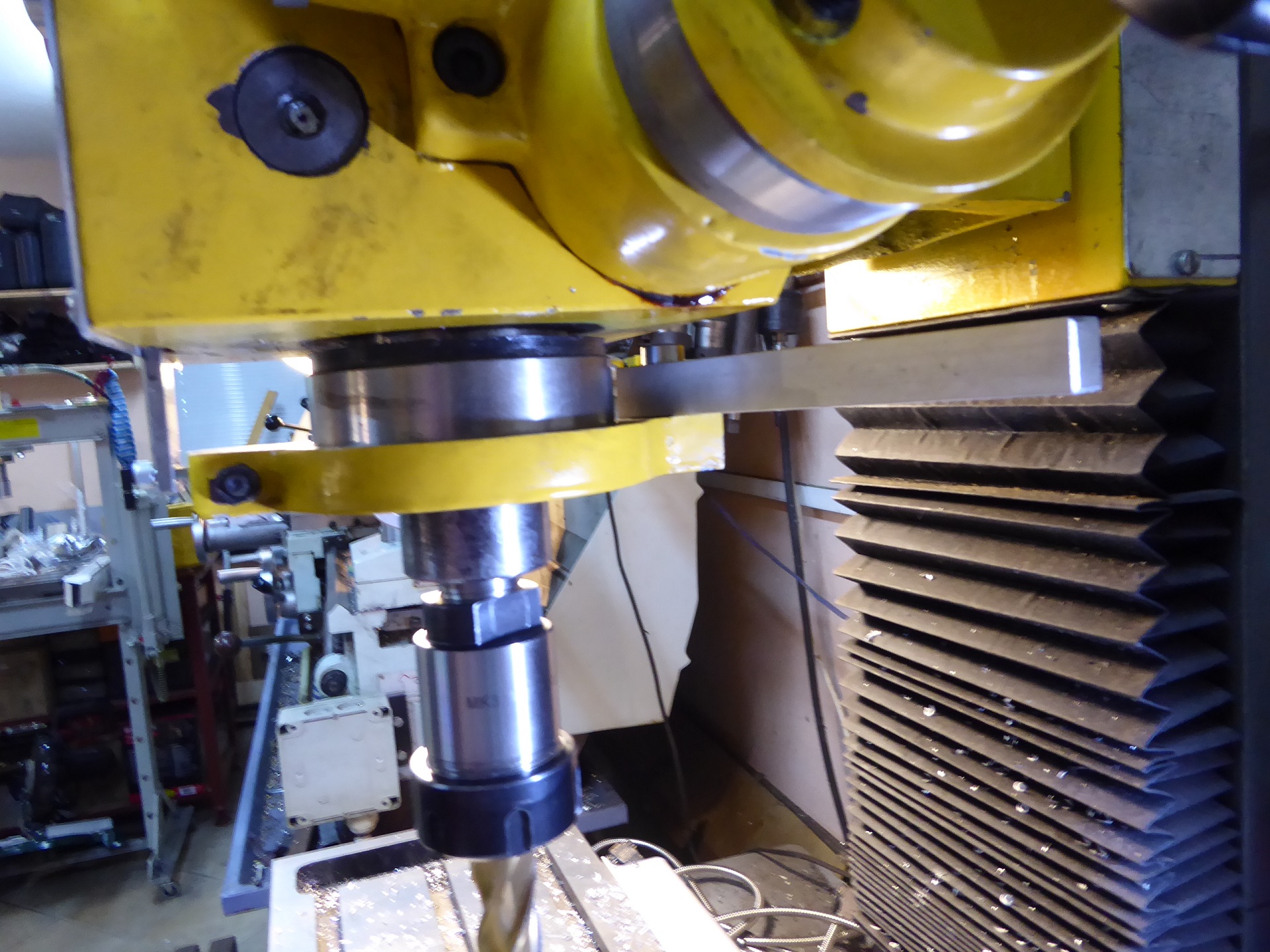
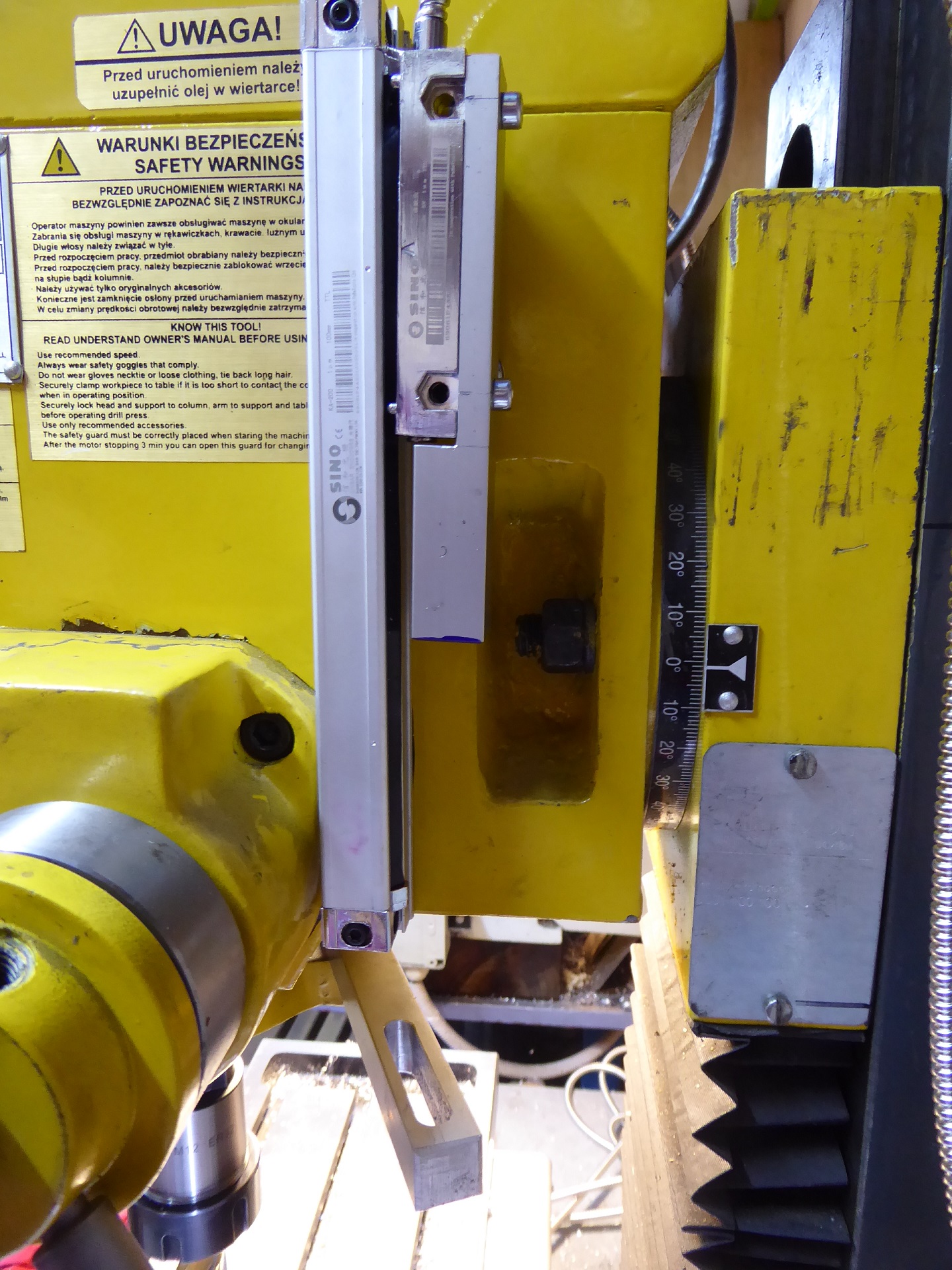
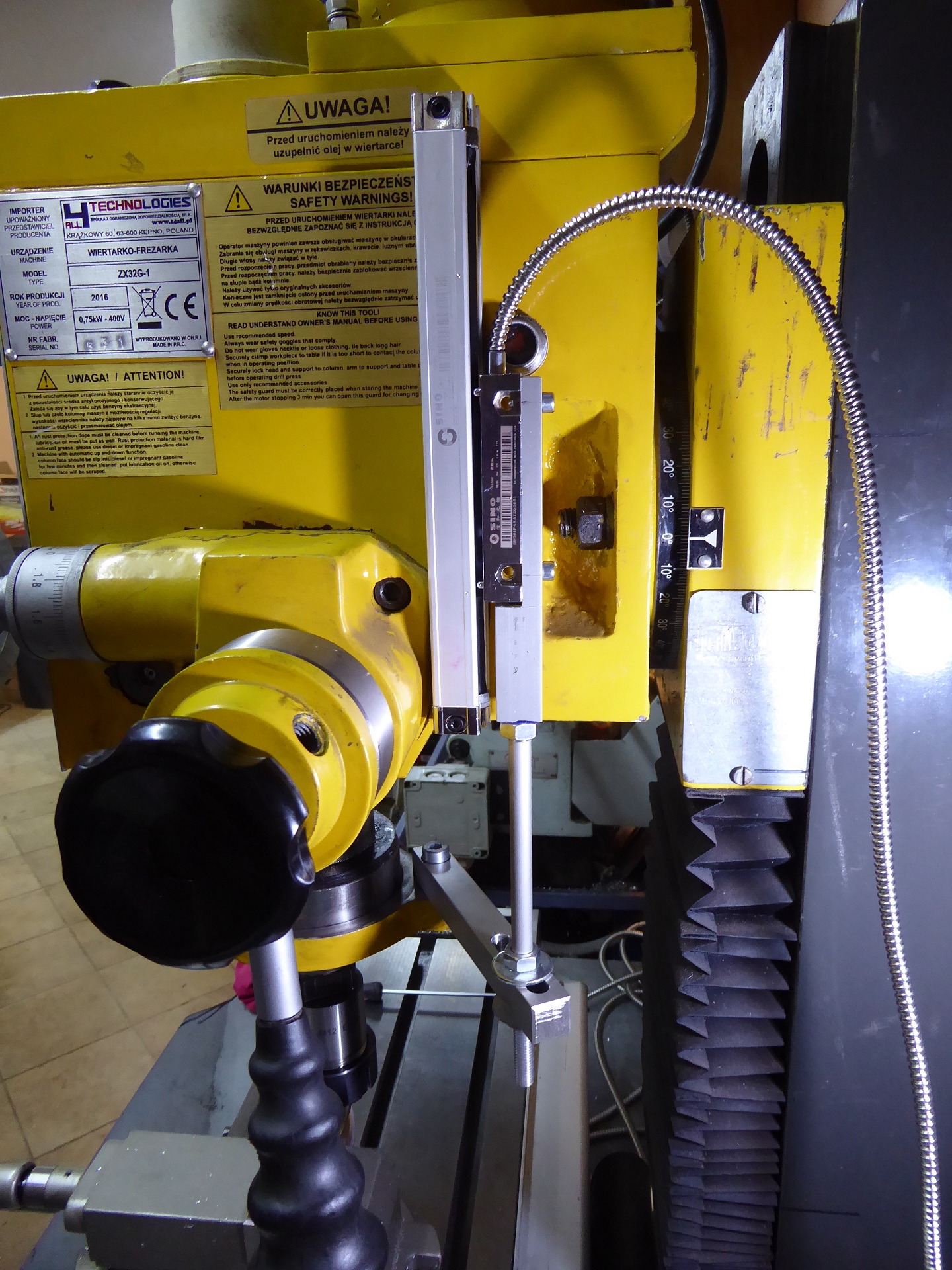
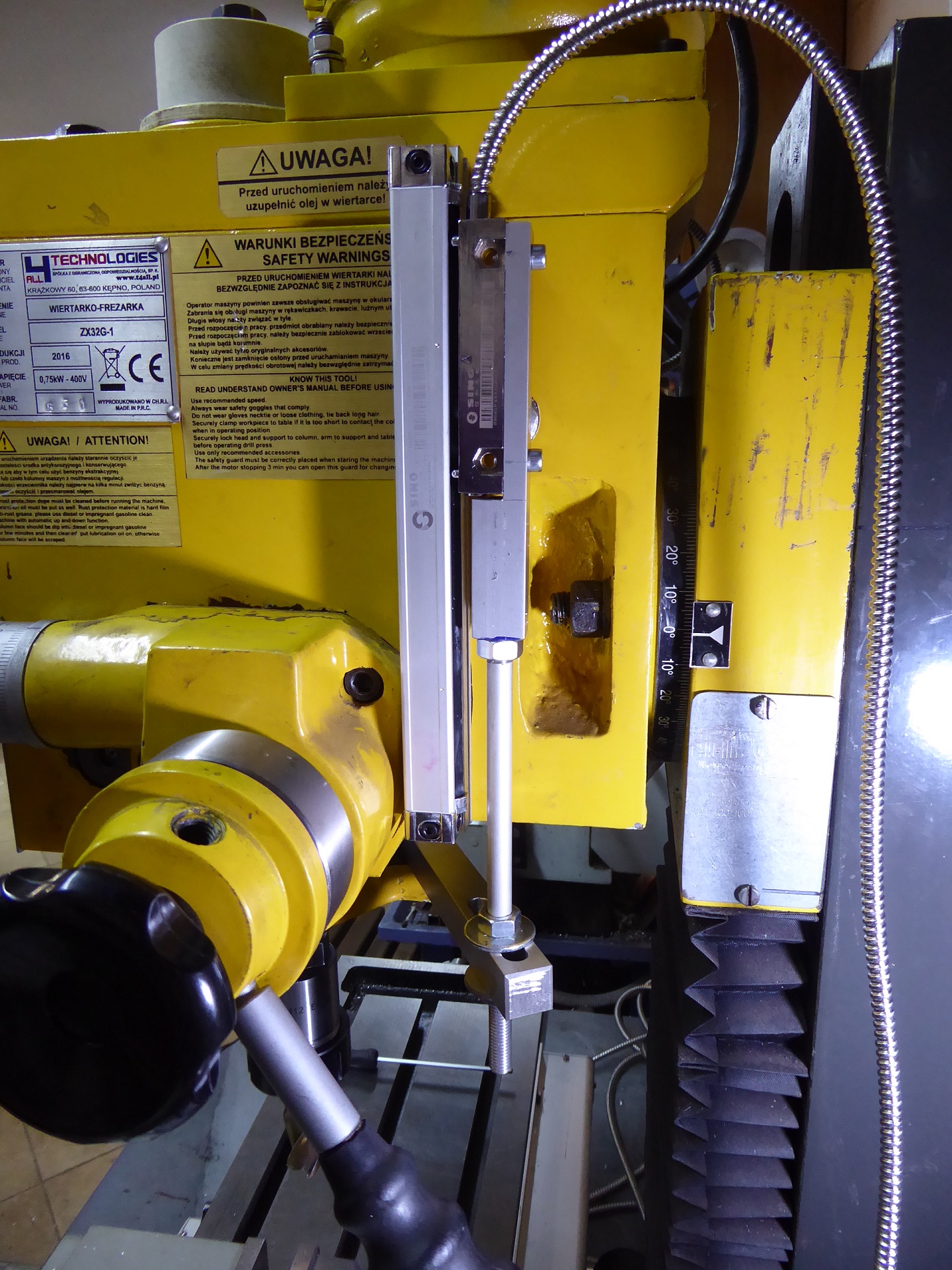
Chodzi oczywiście o sumator DRO, który ma zastosowanie w frezarce (ZX7045). Jeden liniał jest na kolumnie a drugi na pinoli. Na pinoli używam liniału typu suwmiarka, może dałoby się to przerobić na kolejny liniał optyczny z dokładnością 0,005mm ... ale nie wiem czy taka dokładność ma sens w tak giętkiej frezarce.
Suwmiarka pinoli to zestaw od Chinola, firmy SHAHE:
Zasilanie bateryjne 3V, ale da się podpiać 3,3V i działa
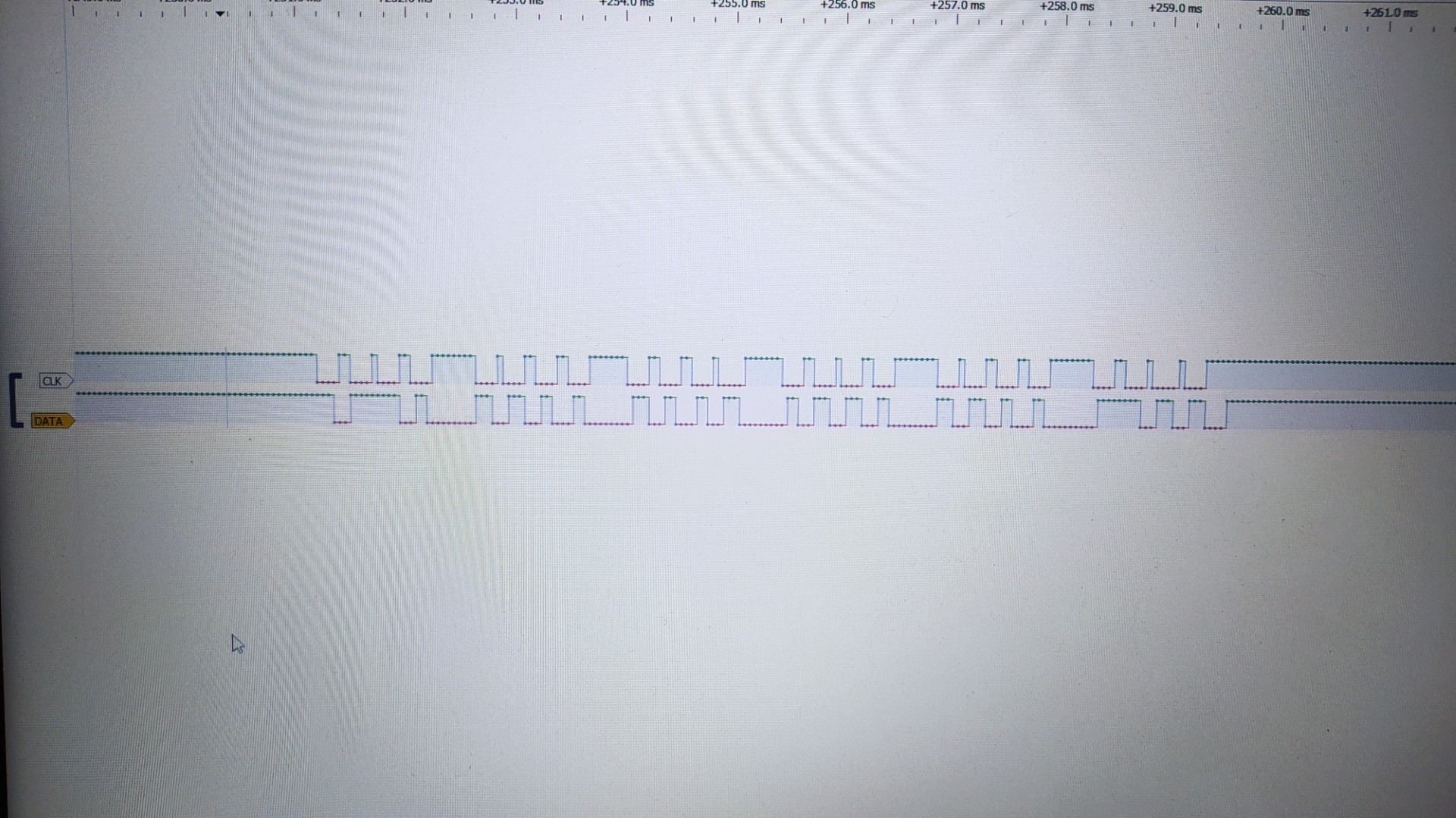
Sygnał z pozycją jest w postaci cyfrowej, jest to sygnał w stylu SPI, 2 linie: DATA i CLK
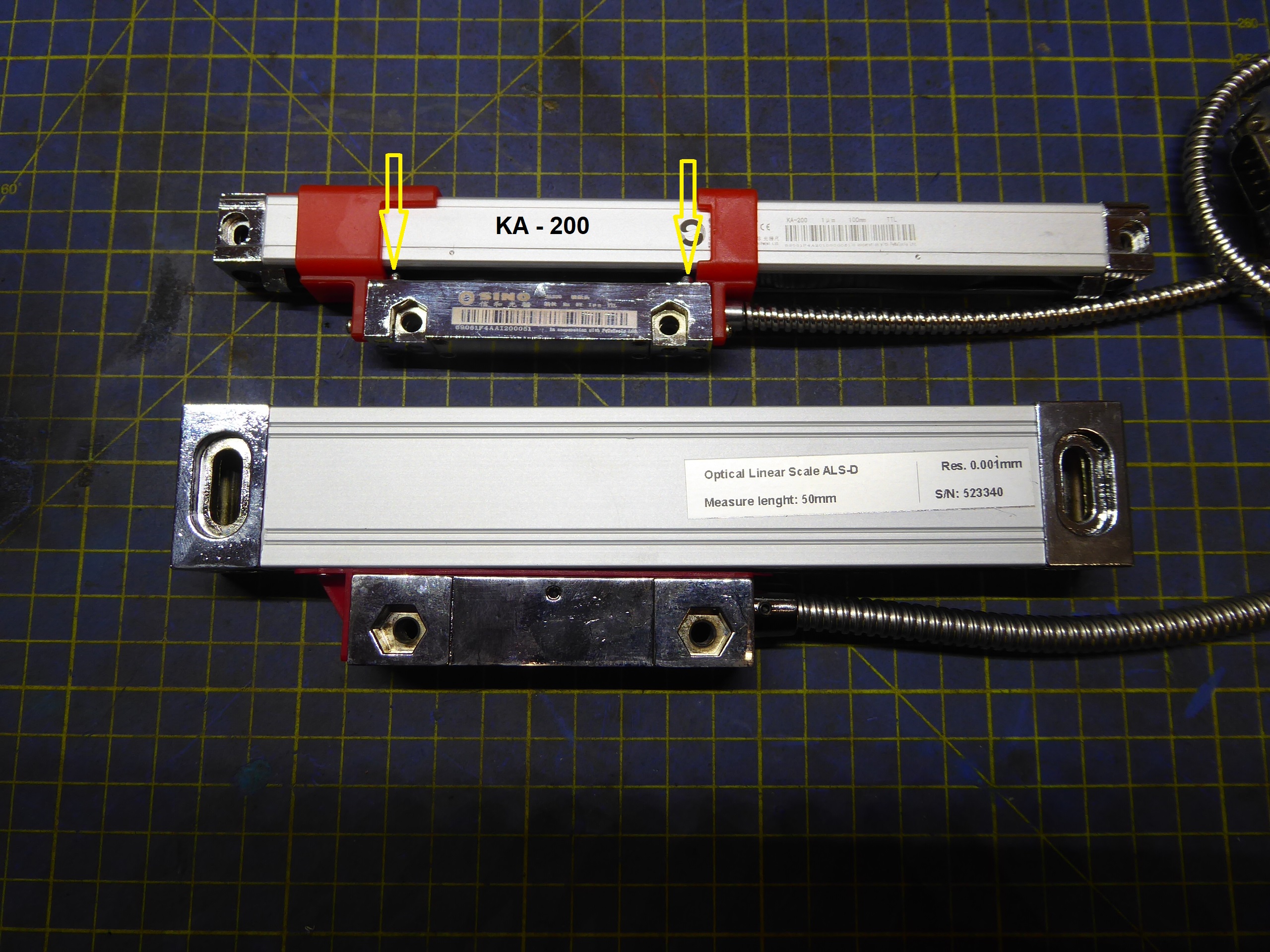
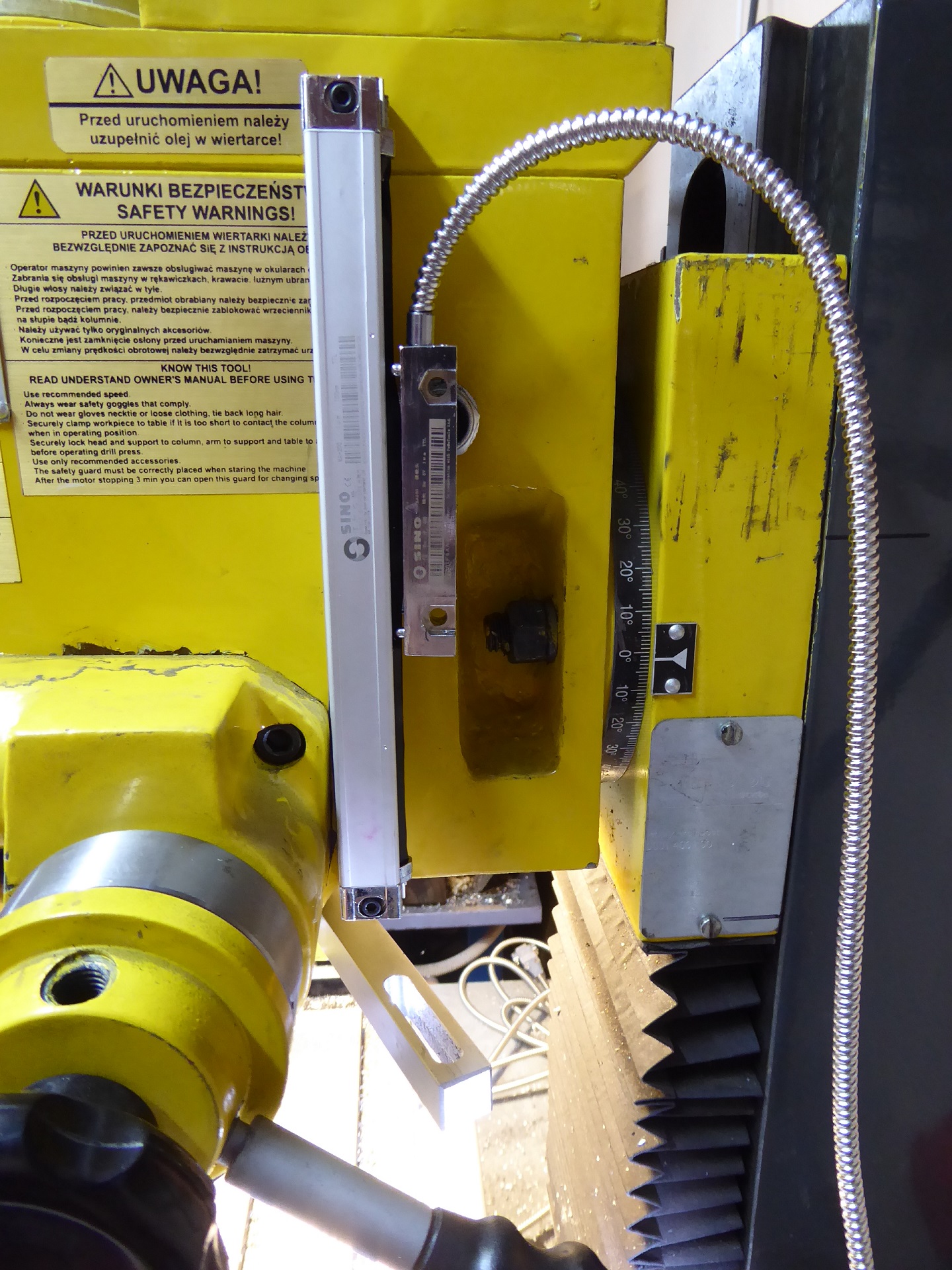
Liniał od kolumny osi Z to kolejny Chińczyk, kupiłem komplet DRO na 3 osie z monitorkiem:
Zasilanie 5V
Sygnał wyjściowy to zwykły enkoder, sygnał A i B. Jest jeszcze jeden sygnał ale można pominąć (coś w stylu drugiej masy, ale delikatnie przesuniętej).
Z monitorka wychodzi zasilanie 5V, którym jest zasilana płytka z mikrokontrolerem ESP8266. Obyło się więc bez dodatkowych zasilaczy.
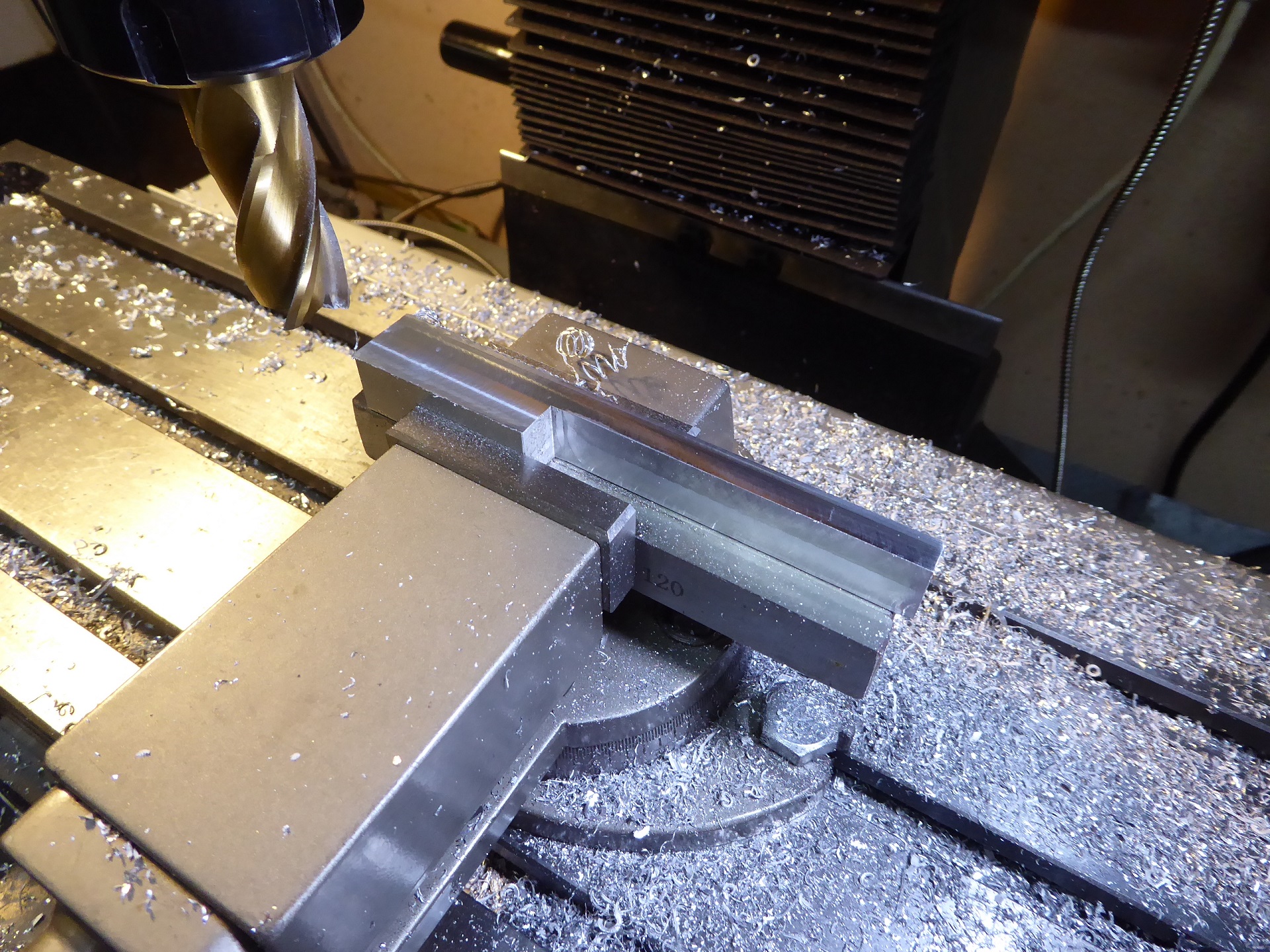
Dziś zrobiłem testy na maszynie i wydaje się działać OK


")

")