Czy ktoś pytał jak to jest zrobione?
NIE!!!
Zatem sam napisze o co w tym biega
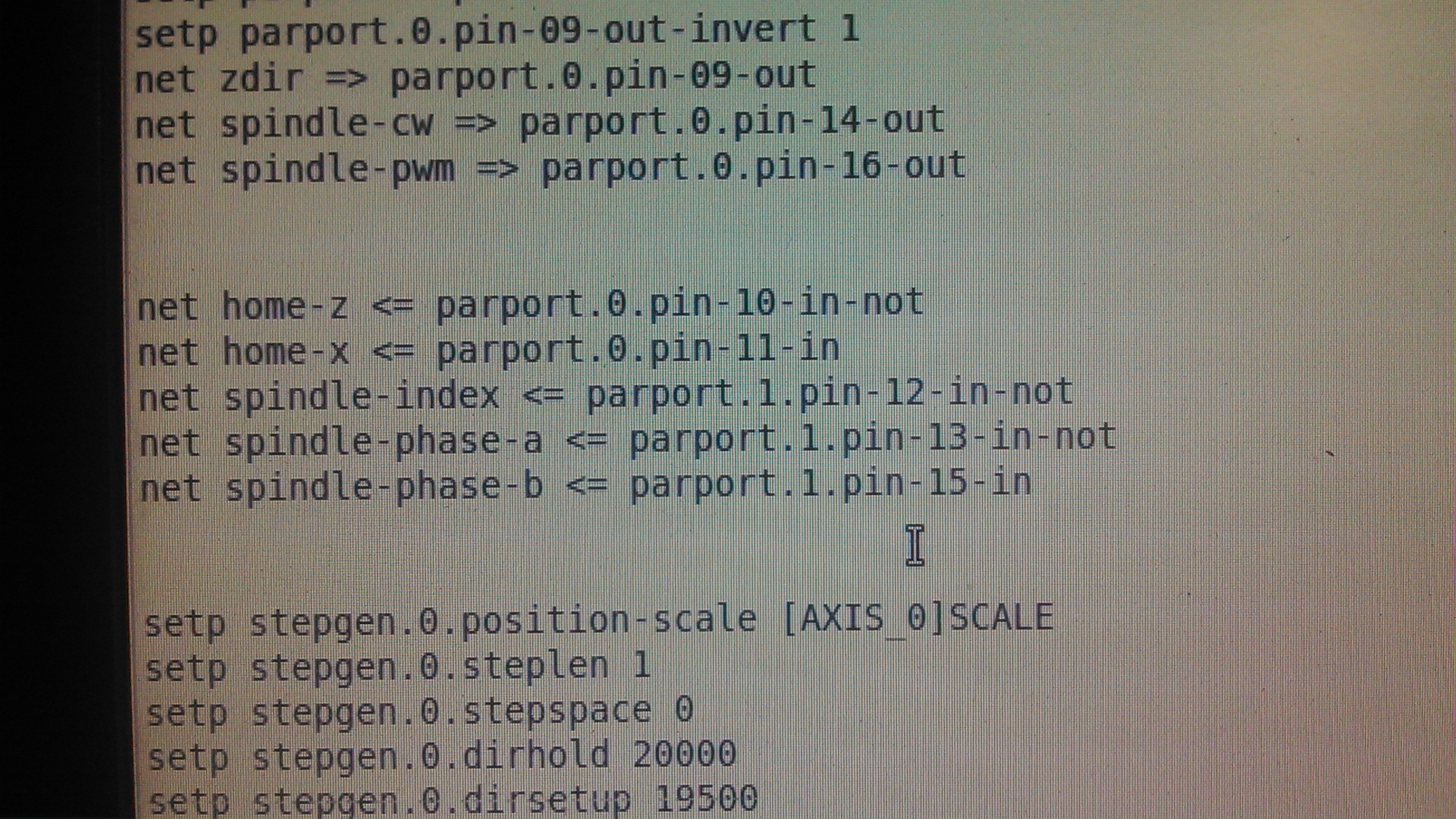
Między enkoder a port LPT podłączyłem podzielnik impulsowy(sam go zbudowałem) x10 czyli 1250/10=125 impulsów
na obrót wrzeciona co umożliwia portowi prawidłowy odczyt, aby uniknąć niepożądanych sygnałów enkoder inkrementalny podłączyłem do zasilacza 5V który zasila tylko enkoder (5V 1A (dane zasilacza). Krytyka jest mile widziana, wzmaga osobę krytykowaną do działań i tak
u mnie jest jeśli ktoś to wykonał to i ja to wykonam, Kiedyś pisałem do KAMAR jak podłączyć enkoder i NIC więc zrozumiałem że jeśli potrafię liczyć (a potrafię) to liczę sam na siebie
Co do emulsji:
Maszyna ma wiele wyjść emulsji ja używam tego wyjścia ponieważ jest uniwersalne dla wszystkich narzędzi (12)
Dodam że mam dwie głowice po 6 narzędzi na każdą i automatyczną zmianę narzędzia z poziomu LINUX CNC
Pozdrawiam.
Piszę w odpowiedzi na tuxcnc
sprzeczne jest twe rozumowanie (teoria zaprzecza praktyce)
Podchodzisz do sprawy teoretycznie i z własnym pojęciem elektroniki (pora na praktykę)
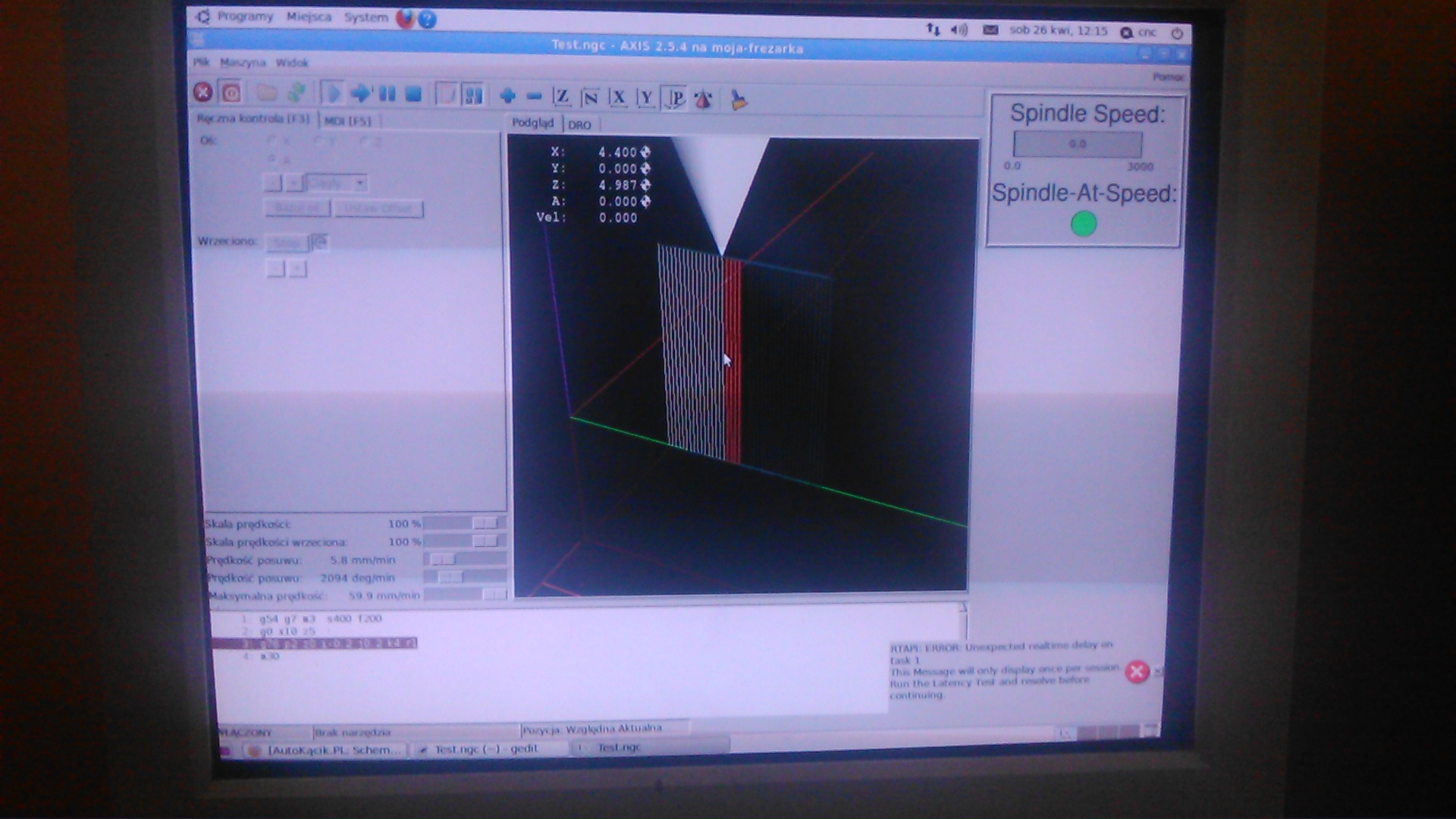
To co wydaje się niemożliwe działa bez problemowo, enkoder czyta prawidłowo gwinty wykonuje idealnie czy to płytką czy też gwintownikiem
Twe zdanie co do sprzeczności jest jak najbardziej zrozumiałe ja osobiście też niewierze w to co a raczej czego nie doświadczam lub nie potrafię wykonać (a naprawdę mało tego jest)
tylko że jeśli sam nie potrafię to po prostu nie wypowiadam się na temat bo nie ma sensu.
Sądzę że moderator nie ma powodu tym razem dawać ostrzeżenia bo raczej zdaje sobie sprawę z braku odpowiedniej praktyki z Twej strony
co do reszty to jakoś nie ma wpływu na działanie enkodera jak i na przesunięcia jak i na kwadraturę
odpowiednie układy dają radę koszt budowy to 50 zł a enkoder wart 3000 zł
Natomiast jakiś CHINOL za 500zł to porażka
Faktem jest że nie obyło się bez problemów (zmiana kompa IP4 3Ghz na IP4 2x3Ghz)
No i te koty jeden szary drugi bury ale i tak wszystkie wpadły do dziury (na szczęście)