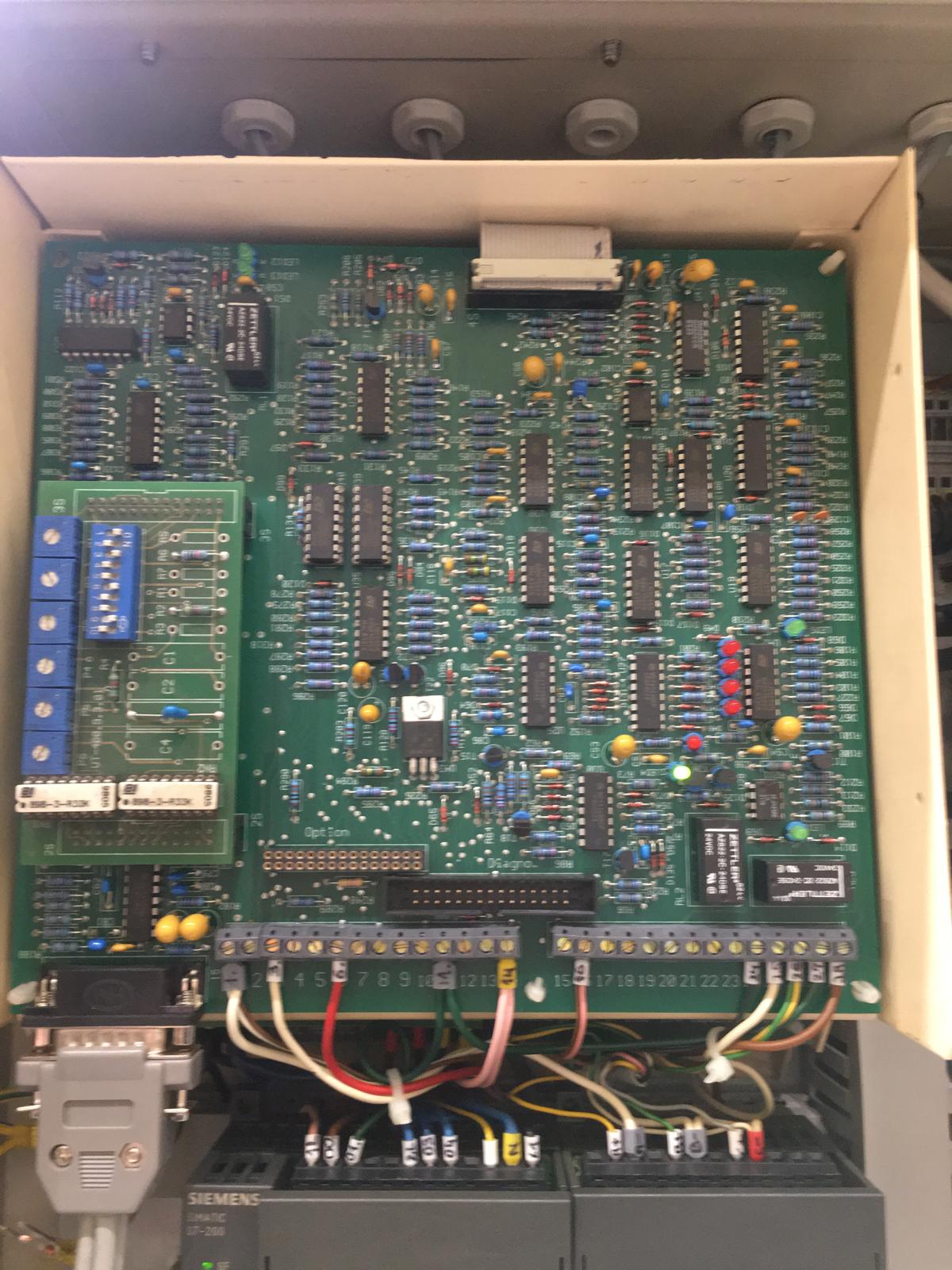
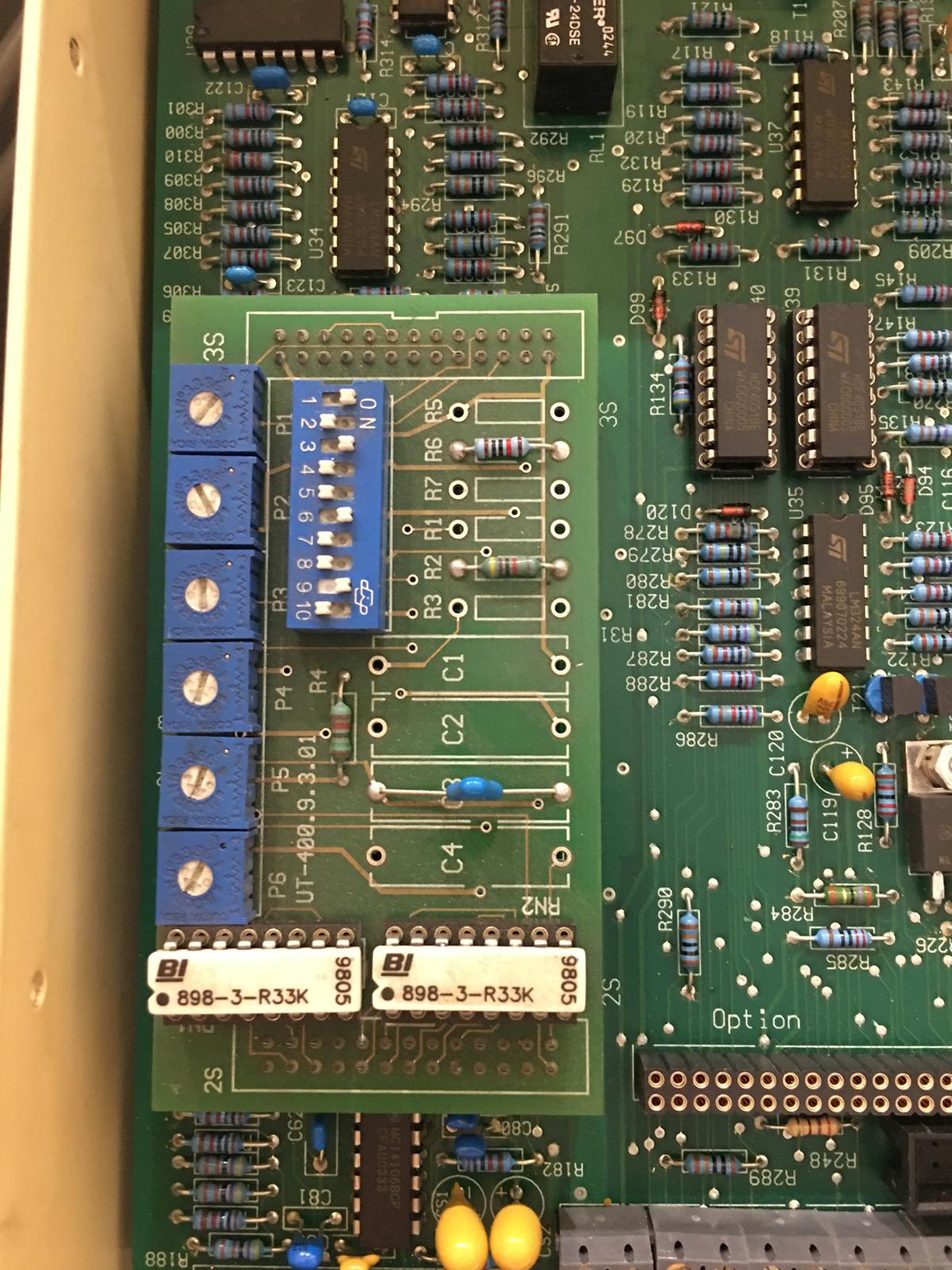
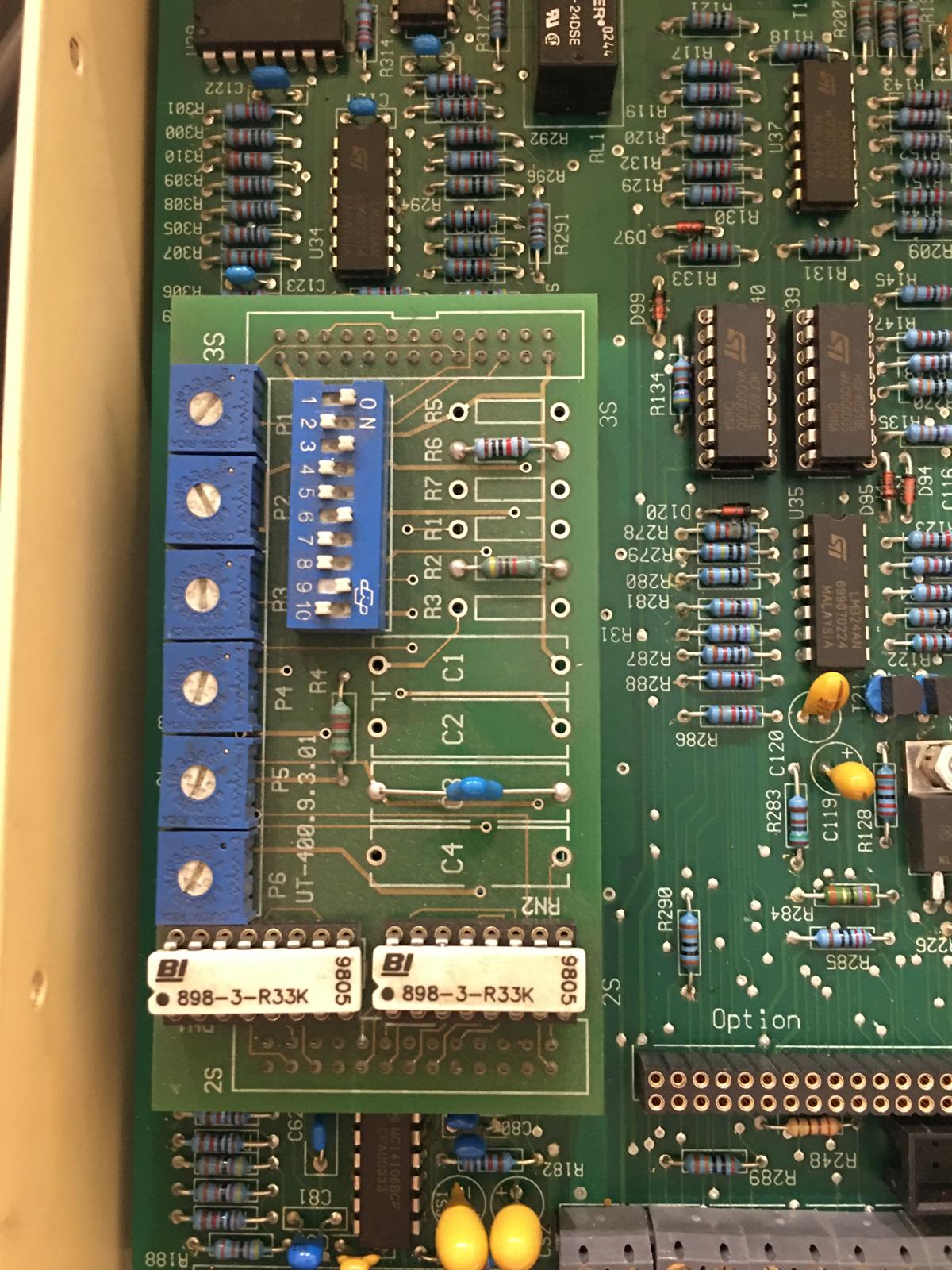
Mam takie archaiczne sterowania i tam nastawy praktyczne Pętli PID w jakiej pracuje układ są realizowane tymi nakładkami na sterowniku
Dodane 2 minuty 11 sekundy:
Obsługa, Programowanie i Budowa Maszyn Numerycznych




Wróć do „Szukam opisu regulacji napędu snilnika DC APENA”






