



Potrzebuję zrobić sobie na stałe podgląd kilku parametrów HAL w oknie axis.
Potrafię użyć pyvcp, ale z jego pomocą da się kontrolować piny, nie parametry.
Czy ktoś zna metodę, która pozwoli zrobić mały panel na którym w czasie rzeczywistym można wyświetlać wartość parametru?
LinuxCNC - wyświetlenie parametrów HAL
-
drzasiek90
Autor tematu - Lider FORUM (min. 2000)
")
- Posty w temacie: 5
- Posty: 2409
- Rejestracja: 25 kwie 2016, 11:58
- Lokalizacja: Jodlowa
- Kontakt:


-
 pitsa
pitsa
- Moderator
-
Lider FORUM (min. 2000)
- Posty w temacie: 3
- Posty: 4472
- Rejestracja: 13 wrz 2008, 22:40
- Lokalizacja: PL,OP
Re: LinuxCNC - wyświetlenie parametrów HAL
Zerknij do "licznik czasu pracy" dodatki-do-linuxcnc-t117662.html tam było jakieś połączenie z hala do panelu.
I mniej więcej tym sposobem wyświetlam w panelu średnicę narzędzia, rozmiary pola roboczego itp.
Zobacz narzędzie halshow (man halshow) jak jest zbudowane.
I mniej więcej tym sposobem wyświetlam w panelu średnicę narzędzia, rozmiary pola roboczego itp.
Zobacz narzędzie halshow (man halshow) jak jest zbudowane.
zachowanie spokoju oznacza zdolności do działania
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
-
drzasiek90
Autor tematu - Lider FORUM (min. 2000)
- Posty w temacie: 5
- Posty: 2409
- Rejestracja: 25 kwie 2016, 11:58
- Lokalizacja: Jodlowa
- Kontakt:
-
pitsa
- Moderator
-
Lider FORUM (min. 2000)
- Posty w temacie: 3
- Posty: 4472
- Rejestracja: 13 wrz 2008, 22:40
- Lokalizacja: PL,OP
Re: LinuxCNC - wyświetlenie parametrów HAL
Pomiar Hal i oscyloskop Hal używałeś?
To są właśnie narzędzia wbudowane w linuxncnc (axis) do podglądu pinów, sygnałów i parametrów.
To są właśnie narzędzia wbudowane w linuxncnc (axis) do podglądu pinów, sygnałów i parametrów.
zachowanie spokoju oznacza zdolności do działania
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
-
drzasiek90
Autor tematu - Lider FORUM (min. 2000)
- Posty w temacie: 5
- Posty: 2409
- Rejestracja: 25 kwie 2016, 11:58
- Lokalizacja: Jodlowa
- Kontakt:
Re: LinuxCNC - wyświetlenie parametrów HAL
Tak oczywiście, pomiar hal działa.
Chodzi jednak o to, aby to był widget dostepny na ekranie cały czas, tak jak np. wyświetla się prędkość wrzeciona na panelu pyvcp.
Pyvcp byłoby najlepszym rozwiązaniem o z jego pomocą potrafię zrobić widget wyświetlający wartość, natomiast z tego co mi się udało w tym temacie ustalić, da się w ten sposób wyświetlić jedynie wartość pinu, parametru nie (a przynajmniej ja nie umiem i właśnie dlatego pytam).
Chodzi jednak o to, aby to był widget dostepny na ekranie cały czas, tak jak np. wyświetla się prędkość wrzeciona na panelu pyvcp.
Pyvcp byłoby najlepszym rozwiązaniem o z jego pomocą potrafię zrobić widget wyświetlający wartość, natomiast z tego co mi się udało w tym temacie ustalić, da się w ten sposób wyświetlić jedynie wartość pinu, parametru nie (a przynajmniej ja nie umiem i właśnie dlatego pytam).
-
pitsa
- Moderator
-
Lider FORUM (min. 2000)
- Posty w temacie: 3
- Posty: 4472
- Rejestracja: 13 wrz 2008, 22:40
- Lokalizacja: PL,OP
Re: LinuxCNC - wyświetlenie parametrów HAL
W pyvcp wyświetla się to co jest dostępne w halui, czyli takie informacje: http://linuxcnc.org/docs/2.8/html/man/man1/halui.1.html
Nie mam pojęcia czym się różni wartość pinu od parametru.
Czy chodzi co o przekazanie z gcodu parametru do linuxcnc? Jakieś M coś tam i to wyświetlić?
Nie mam pojęcia czym się różni wartość pinu od parametru.
Czy chodzi co o przekazanie z gcodu parametru do linuxcnc? Jakieś M coś tam i to wyświetlić?
zachowanie spokoju oznacza zdolności do działania
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
ᐃ 🜂 ⃤ ꕔ △ 𐊅 ∆ ▵ ߡ
-
drzasiek90
Autor tematu - Lider FORUM (min. 2000)
- Posty w temacie: 5
- Posty: 2409
- Rejestracja: 25 kwie 2016, 11:58
- Lokalizacja: Jodlowa
- Kontakt:
Re: LinuxCNC - wyświetlenie parametrów HAL
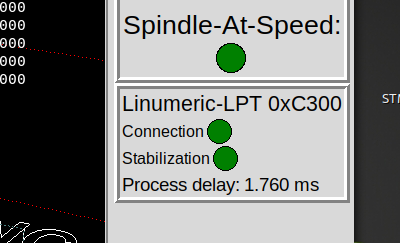
Chodzi o stworzenie panelu statusowego do urządzenia Linumeric - wyświetlenie statusu komunikacji i aktualnego rzeczywistego opóźnienia. Parametr który chce wyświetlić nie pochodzi z G-CODU tylko jest stworzony przeze mnie w pliku źródłowym. Do tego momentu wszystko działa, parametr się wyświetla w oscyloskopie czy pomiarze HAL. Problemem jest wyświetlenie go na stałe w postaci zgrabnego widgetu.
Idealnym rozwiązaniem byłoby użycie pyvcp - http://linuxcnc.org/docs/2.4/html/hal_pyvcp.html
Wyświetlenie pinu HAL nie jest problemem, jednak podłączenie parametru już powoduje, że się nie udaje.
Narazie dopiero zacząłem z tym, więc dopiero to rozgryzam. Zapytałem, bo miałem nadzieję, że ktoś będzie wiedział i zaoszczędzi mi to trochę czasu Z pewnością znajdę jakieś rozwiązanie. Na ten moment dopiero wracam do pracy nad urządzeniem po ponad 2 miesięcznej przerwie na wakacje i remont.
Idealnym rozwiązaniem byłoby użycie pyvcp - http://linuxcnc.org/docs/2.4/html/hal_pyvcp.html
Wyświetlenie pinu HAL nie jest problemem, jednak podłączenie parametru już powoduje, że się nie udaje.
Narazie dopiero zacząłem z tym, więc dopiero to rozgryzam. Zapytałem, bo miałem nadzieję, że ktoś będzie wiedział i zaoszczędzi mi to trochę czasu
-
drzasiek90
Autor tematu - Lider FORUM (min. 2000)
- Posty w temacie: 5
- Posty: 2409
- Rejestracja: 25 kwie 2016, 11:58
- Lokalizacja: Jodlowa
- Kontakt:
Re: LinuxCNC - wyświetlenie parametrów HAL
Udało się osiągnąć zamierzony cel, jednak trzeba było zmienić podejście.
Uparłem się, aby wyświetlać statusy za pomocą pyvcp, bo jest to proste i wygodne.
Nie da się jednak wyświetlić parametru a jedynie sygnał połączony z pinem (przynajmniej tak to zrozumiałem).
Nie sądzę, aby komukolwiek się to przydało, bo pewnie mało kto tutaj grzebie w źródłach linuxcnc (bo i po co) ale podam rozwiązanie.
W pliku źródłowym trzeba utworzyć pin hal oraz sygnał hal i podłączyć do pinu. Wartości zapisuje/odczytuje się z pinu, natomiast pyvcp korzysta ze sygnału.
Uparłem się, aby wyświetlać statusy za pomocą pyvcp, bo jest to proste i wygodne.
Nie da się jednak wyświetlić parametru a jedynie sygnał połączony z pinem (przynajmniej tak to zrozumiałem).
Nie sądzę, aby komukolwiek się to przydało, bo pewnie mało kto tutaj grzebie w źródłach linuxcnc (bo i po co) ale podam rozwiązanie.
W pliku źródłowym trzeba utworzyć pin hal oraz sygnał hal i podłączyć do pinu. Wartości zapisuje/odczytuje się z pinu, natomiast pyvcp korzysta ze sygnału.






