



Potrzebuję kilku podstawowych informacji na temat systemów 3D programowania robotów. Jakie to są programy? Co umożliwiają? itp itd. Za wszelką pomoc wielkie dzięki
Systemy 3D programowania robotów
-
pawelkob
Autor tematu - Nowy użytkownik, używaj wyszukiwarki

- Posty w temacie: 1
- Posty: 9
- Rejestracja: 26 gru 2007, 15:37
- Lokalizacja: warszawa
Systemy 3D programowania robotów
Witam!
Potrzebuję kilku podstawowych informacji na temat systemów 3D programowania robotów. Jakie to są programy? Co umożliwiają? itp itd. Za wszelką pomoc wielkie dzięki
Potrzebuję kilku podstawowych informacji na temat systemów 3D programowania robotów. Jakie to są programy? Co umożliwiają? itp itd. Za wszelką pomoc wielkie dzięki
Tagi:


")
-
atu79
- Sympatyk forum poziom 2 (min. 50)
")
- Posty w temacie: 1
- Posty: 61
- Rejestracja: 19 kwie 2007, 16:20
- Lokalizacja: Jaworzno
witam
Ja pracuję na robotach włoskiej firmy COMAU. Każdy robot posiada swoje "TP" tzn. komputer na którym programuje się go. Programowanie "Easy" polega na ruszaniu robotem za pomocą poszczególnych osi (6 osi+2 osie dla narzędzia), lub ruszaniu względem Tool(narzedzia), UFrame (ramki) i save'owaniu poszczegolnych punktów w przestrzeni. Nastepnie przypisuje się odpowiednie ruchy między punktami. Programowanie bardzo podobne jest do PASCALA. Programowanie zaawansowane moze polegać na zadaniu wstępnym trajektorii w programie np robocad i drobnych korektach punktów na lini gdzie ustawiony jest robot. W tym celu potrzebujemy dokładne rysunki rozmieszczenia robotów i poszczegolnych elementow w gniezdzie. Tak wygląda w bardzooooo wielkim skrucie programowanie robota. Jak chcesz wiedzieć więcej to pisz tylko sprecyzuj pytanie. Pozdrawiam.
Ja pracuję na robotach włoskiej firmy COMAU. Każdy robot posiada swoje "TP" tzn. komputer na którym programuje się go. Programowanie "Easy" polega na ruszaniu robotem za pomocą poszczególnych osi (6 osi+2 osie dla narzędzia), lub ruszaniu względem Tool(narzedzia), UFrame (ramki) i save'owaniu poszczegolnych punktów w przestrzeni. Nastepnie przypisuje się odpowiednie ruchy między punktami. Programowanie bardzo podobne jest do PASCALA. Programowanie zaawansowane moze polegać na zadaniu wstępnym trajektorii w programie np robocad i drobnych korektach punktów na lini gdzie ustawiony jest robot. W tym celu potrzebujemy dokładne rysunki rozmieszczenia robotów i poszczegolnych elementow w gniezdzie. Tak wygląda w bardzooooo wielkim skrucie programowanie robota. Jak chcesz wiedzieć więcej to pisz tylko sprecyzuj pytanie. Pozdrawiam.
-=Artur=-
-
garbus509
- Nowy użytkownik, używaj wyszukiwarki
- Posty w temacie: 1
- Posty: 1
- Rejestracja: 29 sty 2009, 14:26
- Lokalizacja: gdańsk
Witam
Ja uczyłem się programować roboty kawasaki w języku AS i one mają program do sprawdzenia tego co się zrobiło w PC roset program można ściągnąć ze strony firmy oraz dystrybutora w Polsce. W programie tym jest tech pendant wirtualny i można tam robota programować bez poznania AS jakieś proste ruchy.
Ja uczyłem się programować roboty kawasaki w języku AS i one mają program do sprawdzenia tego co się zrobiło w PC roset program można ściągnąć ze strony firmy oraz dystrybutora w Polsce. W programie tym jest tech pendant wirtualny i można tam robota programować bez poznania AS jakieś proste ruchy.
-
pegie13
- Nowy użytkownik, używaj wyszukiwarki
- Posty w temacie: 1
- Posty: 7
- Rejestracja: 20 paź 2009, 11:24
- Lokalizacja: Kraków
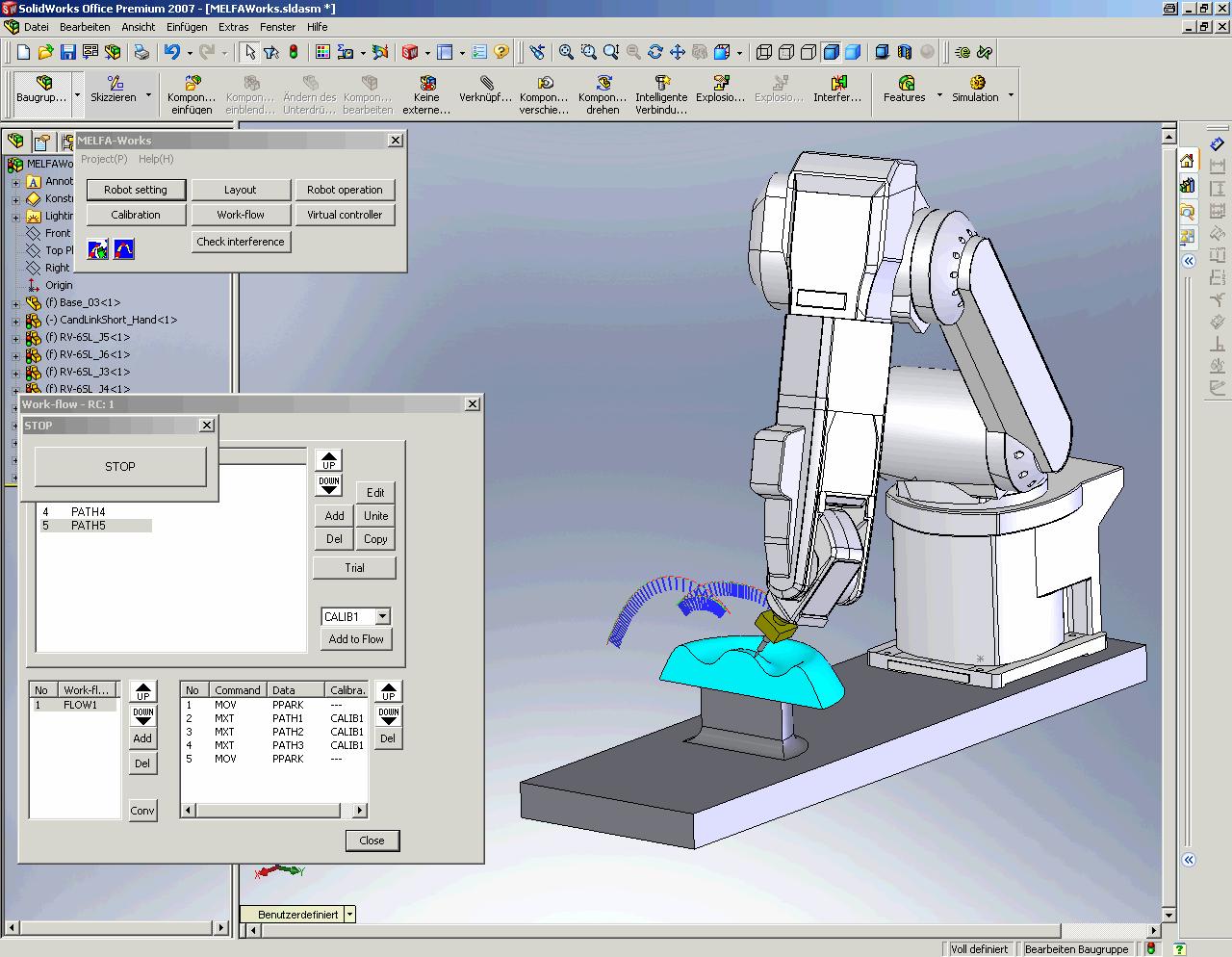
Firma Mitsubishi dostarcza razem z robotami program Melfa Works. Jest to program który umożliwia narysowanie całego stanowiska w Solid Works'ie. Następnie wprowadza się model robota oraz chwytaki. W programie można konfigurować ścieżkę robota, zadawać punkty oraz przeprowadzać symulacje.
Kiedyś pisałem w tym program w celu zbadania czasu cyklu procesu.
Przesyłam przykładowe okno:
Kiedyś pisałem w tym program w celu zbadania czasu cyklu procesu.
Przesyłam przykładowe okno:






