



Odnośnie symulacji. Nie prawda. W symulacji nie podajesz przyspieszen. W symulacji możesz podać prędkość ruchów G0 iG1 z kosmosu a symulacja ci to zasługuje. Jitter powinien być w okolicy chyba 15000 do 30000 ns. Sprawdź na wiki linuxcnc. Ja pisze z telefonu i ciężko coś się tu sprawdza. Komputer nie musi byc stary tylko musi mieć LPT dzialajacy w trybie EPS. Musiał bym w domu sprawdzić bo złącze LPT działa w 2 trybach. Różnią się one między sobą ilością linii wejściowych i wyjściowych. Zapytaj o to wojna googleCinekX0 pisze:philut,
przeniosłeś się w czasoprzestrzeni na kilka dni?
Mówiąc o przyśpieszeniach masz na myśli silniki, jak szybko ruszają do max prędkości?
Mam starego Celerona 2,8Ghz 2Gb ramu, taki odpowiednik Pentium 4 z 2005 roku
Na nim postawiłem Ubuntu, czyli działać powinien kwestia tylko ile da się wycisnąć z niego.
wedlock,
Dzięki za info! Czytałem wątek odnośnie PC do sterowania maszyn i to temat magia...
Generalnie komputer musi być stary, jak zbyt nowy to są problemy.
Jitter poniżej 30 000 musi być o ile dobrze pamiętam?
Tak ogólnie podsumowując:
Jeżeli symulacja trwa np 10min to obróbka fizyczna też musi trwać 10 min
Występowanie problemu można sprawdzić przy obróbce trochoidalnej - większa ilość G-code?
Realizacja - frezarka kolumnowa 4 osiowa
-
wedlock
- Stały bywalec (min. 70)
")
- Posty w temacie: 7
- Posty: 71
- Rejestracja: 04 lut 2017, 15:48
- Lokalizacja: Bartoszyce
Tagi:


-
CinekX0
Autor tematu - Specjalista poziom 1 (min. 100)
")
- Posty w temacie: 98
- Posty: 228
- Rejestracja: 18 paź 2014, 21:36
- Lokalizacja: Poznań
wedlock,
Rozumiem, że wtedy czas symulacji powinien zgadzać się z rzeczywistym?
Dla chętnych znalazłem taki filmik:

Wychodzi z tego, że jeżeli fizycznie konstrukcja i silniki na to pozwalają, to Jitter musi być jak najmniejszy...
Ciekaw jestem jak to wypadnie u mnie. Śruba 5mm skok, 12Nm silniki 2:1 przekładnia.
Fajnie jakby fruwało z 5000mm/min w aluminium
Czyli w symulacji frez jedzie zawsze z parametrem max od samego 0? Trochę to dziwne dla mnie ale OK.wedlock pisze: W symulacji nie podajesz przyspieszen.
Jak z kosmosu to właśnie żle. Jeżeli będę znał MOŻLIWOŚCI frezarki to wpiszę max przyśpieszenia RZECZYWISTE jakie mogę uzyskać na osiach?wedlock pisze:W symulacji możesz podać prędkość ruchów G0 iG1 z kosmosu
Rozumiem, że wtedy czas symulacji powinien zgadzać się z rzeczywistym?
Gugl coś kiepsko o tym EPS pisze, ale chodzi o dużego 'śledzia' pewnie? Występują jeszcze małe porty LPT...wedlock pisze:Komputer nie musi byc stary tylko musi mieć LPT dzialajacy w trybie EPS
Dla chętnych znalazłem taki filmik:
Facet pokazuje jak właśnie Jitter ma wpływ na ostateczną prędkość maszyny
Wychodzi z tego, że jeżeli fizycznie konstrukcja i silniki na to pozwalają, to Jitter musi być jak najmniejszy...
Ciekaw jestem jak to wypadnie u mnie. Śruba 5mm skok, 12Nm silniki 2:1 przekładnia.
Fajnie jakby fruwało z 5000mm/min w aluminium
-
philut
- Znawca tematu (min. 80)
")
- Posty w temacie: 18
- Posty: 97
- Rejestracja: 19 lut 2012, 15:25
- Lokalizacja: Gdynia
wedlock dzięki za informacje, trochę mi rozjaśniłeś sprawę.
CinekX0 Chodziło mi o rampy na silnikach, przyspieszenie. Jak są duże to wydłuża też czas pracy, ale nie aż tak bardzo jak kwestia jittera... W symulacji nie ma przyspieszeń, bo na prawdę są nie potrzebne, ale prędkość obróbki już tak, jeżeli wirtualnie obrabiasz z F1000 a w rzeczywistości wychodzi ci F500 z powodu Jittera to jest lipa, ja tak właśnie mam i w chwilach wolnych to sobie poprawie, ew. zmienię kompa na mocniejszy.
CinekX0 Chodziło mi o rampy na silnikach, przyspieszenie. Jak są duże to wydłuża też czas pracy, ale nie aż tak bardzo jak kwestia jittera... W symulacji nie ma przyspieszeń, bo na prawdę są nie potrzebne, ale prędkość obróbki już tak, jeżeli wirtualnie obrabiasz z F1000 a w rzeczywistości wychodzi ci F500 z powodu Jittera to jest lipa, ja tak właśnie mam i w chwilach wolnych to sobie poprawie, ew. zmienię kompa na mocniejszy.
-
CinekX0
Autor tematu - Specjalista poziom 1 (min. 100)
- Posty w temacie: 98
- Posty: 228
- Rejestracja: 18 paź 2014, 21:36
- Lokalizacja: Poznań
Małe postępy:

Szafka podpięta na miejscu docelowym, podłączyłem 1 silnik i pora zacząć testy.
Czy prąd na sterowniki (zworki) ustawić na maksymalny oraz rozdzielczość sterownika na maksymalny parametr?
Odpalę Linuxa i dam znać czy silnik zrobi 1 obrót na 10mm posuwu, wtedy chyba będzie sukces!
Prędkościami maszyny zajmiemy się później.

Chłodnica do wrzeciona, powinna dać radę z nadmiarem ciepła
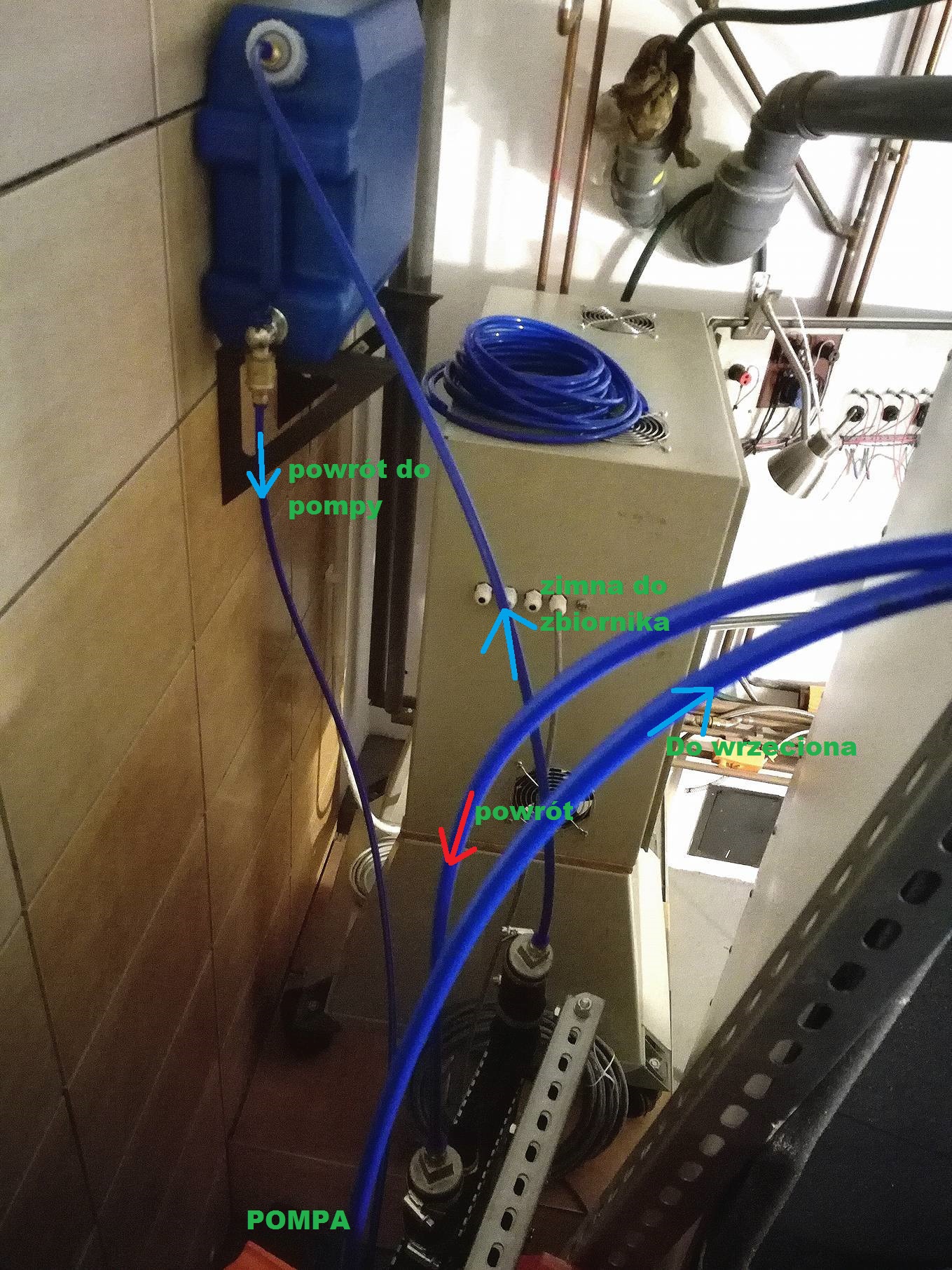
I tak wygląda układ chłodzenia. Pompa od ogrzewania CO2.
Szafka podpięta na miejscu docelowym, podłączyłem 1 silnik i pora zacząć testy.
Czy prąd na sterowniki (zworki) ustawić na maksymalny oraz rozdzielczość sterownika na maksymalny parametr?
Odpalę Linuxa i dam znać czy silnik zrobi 1 obrót na 10mm posuwu, wtedy chyba będzie sukces!
Prędkościami maszyny zajmiemy się później.
Chłodnica do wrzeciona, powinna dać radę z nadmiarem ciepła
I tak wygląda układ chłodzenia. Pompa od ogrzewania CO2.
-
wedlock
- Stały bywalec (min. 70)
- Posty w temacie: 7
- Posty: 71
- Rejestracja: 04 lut 2017, 15:48
- Lokalizacja: Bartoszyce
Powiem Ci ze mi się podoba. Tylko przy pompce od CO uważaj na wzrost ciśnienia. Przy laminarnym przepływie cieczy nic się nie stanie ale przy jakimś zagieciu pompa potrafi wysadzić te złączki. Podwyzszona temperatura zmiekcza tez te przewody. Wiem bo mam komputer chłodzony woda. Po drugie to mało wydajne i głośne chłodzenie tyloma małymi wiatrakami. Żeby było ciszej dał bym 2 wiatraki 240cm takie do obudów komputera a po drugie odsun wiatraki od chłodnicy o kilka centymetrów. Powietrze wtłoczone nie będzie odbijac się od chłodnicy i tym samym nie wytłumi ci strumienia zasysanego . Przy testach z moim komputerem chłodzony woda temperatura wody w układzie spadła mi dokładnie do temperatury otoczenia. Bez tego była 2 stopnie większa. Wiem ze to mało ale .... zawsze 2 stopnie mniej. Pamiętaj też aby woda czy też inny czynnik zabezpieczyć przed glonami. Ja mam mieszankę glikolu woda. Sam glikogenu jest za gęsty dla mojej pompki
-
CinekX0
Autor tematu - Specjalista poziom 1 (min. 100)
- Posty w temacie: 98
- Posty: 228
- Rejestracja: 18 paź 2014, 21:36
- Lokalizacja: Poznań
wedlock,
Dzięki, cieszę cię!
Wiatraki są od komputera, nie słychać ich ani troszkę
Ogólnie 1 podejście z Linuxem przegrane.
Sprawa wygląda tak:
Załączam zasilanie w szafie, zasilanie dochodzi do sterowników
Włączam komputer z Ubuntu. Pojawia się delikatny pisk silnika prawdopodobnie zasilanie momentu trzymającego silnik w spoczynku?
Następnie załączam zasilanie płyty głównej SSk-MB2
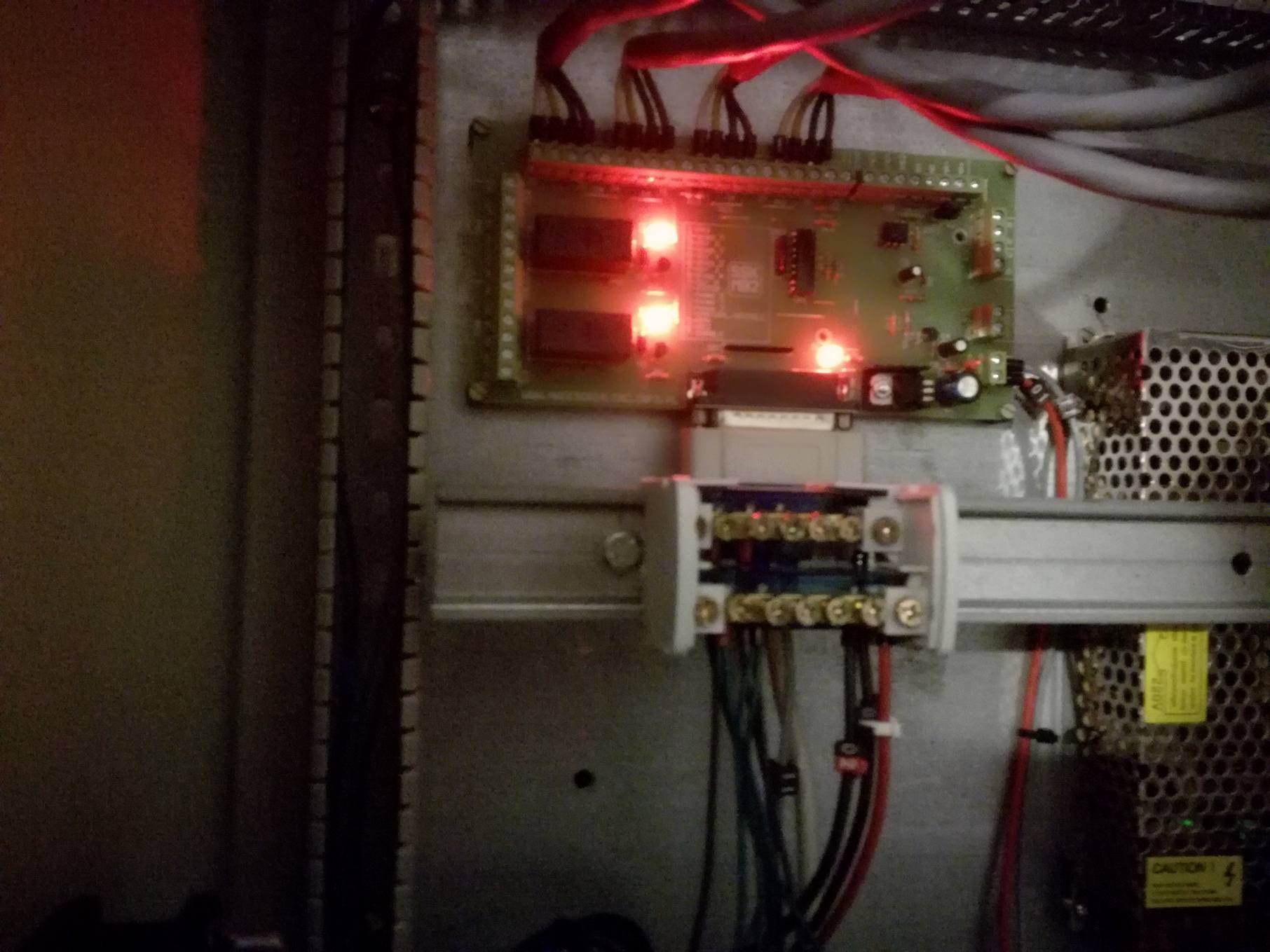
Zapalają się diody sygnalizujące D1 oraz D2 D4
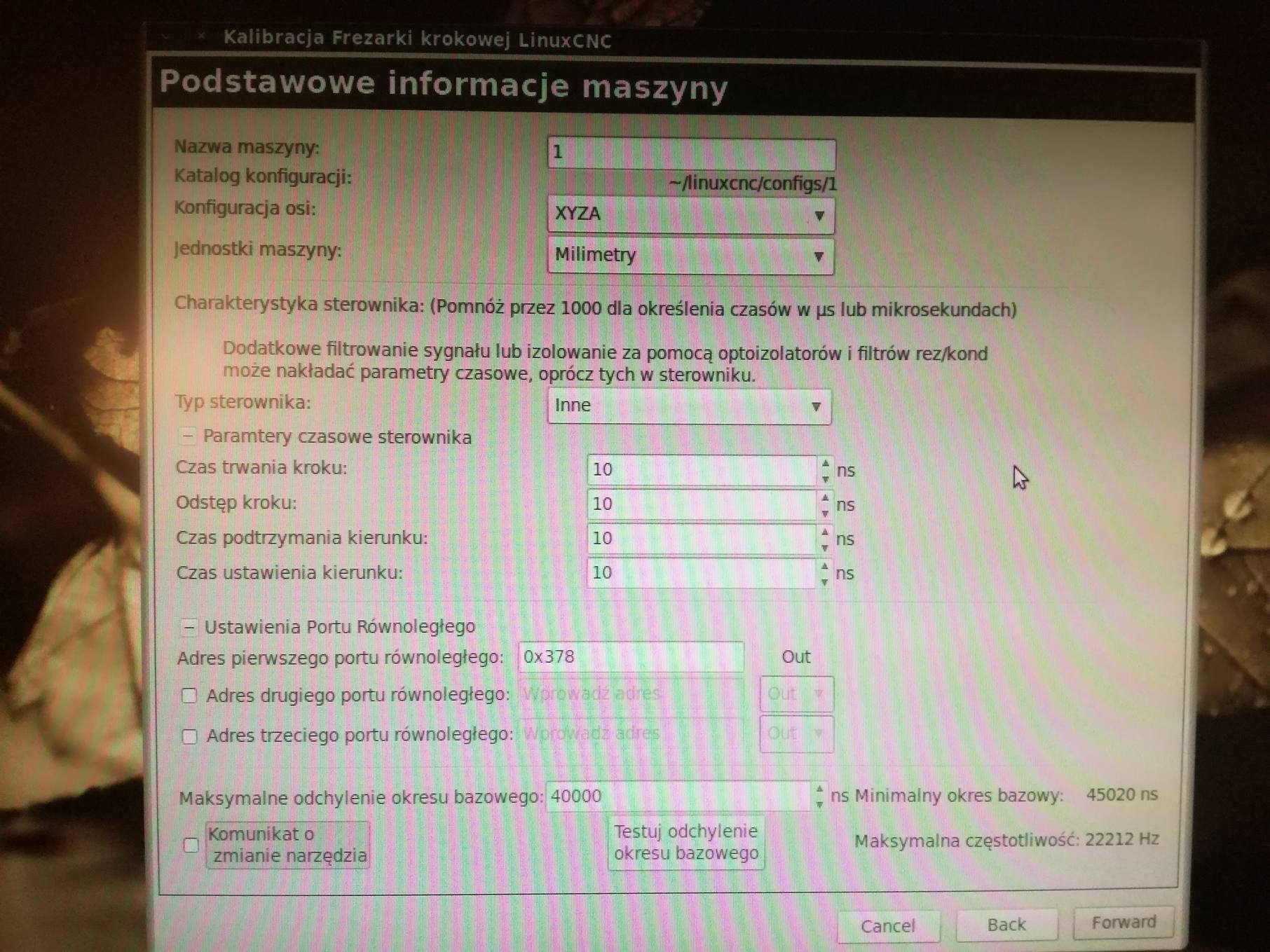
Odpalam StepConf
Zostawiam domyślne parametry i czasy
Zostawiam domyślne parametry portu LPT. I właśnie czy na pewno na danym pinie LPT jest dana oś i krok/kierunek?
pomijam osie X i Y przechodzę do Z
W tym momencie ustawiam skok śruby na 5mm, krok 200 mikrokrok 400. I tak samo na zworkach sterownika mam, najniższa wartość. Amperaż ustawiłem na 3,5 tak samo jak na silniku.
W tym momencie jest opcja test osi, klikam uruchom, klikam strzałki i nic nie kręci a powinno.
Gaśnie również dioda D2 i D4 na płycie głównej, do momentu ponownego restartu Linuxa
Zaczynam wątpić czy sam będę wstanie to ogarnąć i wprawić w ruch.
Pomoc / sugestie mile widziane. Poradniki na YT zaliczyłem chyba wszystkie
Dzięki, cieszę cię!
Wiatraki są od komputera, nie słychać ich ani troszkę
Ogólnie 1 podejście z Linuxem przegrane.
Sprawa wygląda tak:
Załączam zasilanie w szafie, zasilanie dochodzi do sterowników
Włączam komputer z Ubuntu. Pojawia się delikatny pisk silnika prawdopodobnie zasilanie momentu trzymającego silnik w spoczynku?
Następnie załączam zasilanie płyty głównej SSk-MB2
Zapalają się diody sygnalizujące D1 oraz D2 D4
Odpalam StepConf
Zostawiam domyślne parametry i czasy
Zostawiam domyślne parametry portu LPT. I właśnie czy na pewno na danym pinie LPT jest dana oś i krok/kierunek?
pomijam osie X i Y przechodzę do Z
W tym momencie ustawiam skok śruby na 5mm, krok 200 mikrokrok 400. I tak samo na zworkach sterownika mam, najniższa wartość. Amperaż ustawiłem na 3,5 tak samo jak na silniku.
W tym momencie jest opcja test osi, klikam uruchom, klikam strzałki i nic nie kręci a powinno.
Gaśnie również dioda D2 i D4 na płycie głównej, do momentu ponownego restartu Linuxa
Zaczynam wątpić czy sam będę wstanie to ogarnąć i wprawić w ruch.
Pomoc / sugestie mile widziane. Poradniki na YT zaliczyłem chyba wszystkie
-
 zacharius
zacharius
- Lider FORUM (min. 2000)
")
- Posty w temacie: 3
- Posty: 2558
- Rejestracja: 04 paź 2007, 01:32
- Lokalizacja: Kraków
- Kontakt:
na drugim ekranie StepConf jest konfiguracja pinow portu.
z opisu zgaduje dwie opcje: kabel i sygnaly od płyty do sterow.
kabel pasuje sprawdzić czy nie jest odwrócony jakoś i np pin 2 portu przychodzi na pin 2 płyty.
sygnały z płyty do sterów:
a) enable w jakim jest stanie itp. może trzeba go odwrócić bo jak maszyna piszczy bez logiki a przy włączeniu testu osi przestaje to może być to
b) drabinka rezystorowa w SSK-MB2 podciąga port do +5V wiec stan aktywny portu zdaje się powinien być 0 czyli odwrócony (invert na tym samym 2gim ekranie stepconf)
to tak pierwsze co przychodzi do głowy
z opisu zgaduje dwie opcje: kabel i sygnaly od płyty do sterow.
kabel pasuje sprawdzić czy nie jest odwrócony jakoś i np pin 2 portu przychodzi na pin 2 płyty.
sygnały z płyty do sterów:
a) enable w jakim jest stanie itp. może trzeba go odwrócić bo jak maszyna piszczy bez logiki a przy włączeniu testu osi przestaje to może być to
b) drabinka rezystorowa w SSK-MB2 podciąga port do +5V wiec stan aktywny portu zdaje się powinien być 0 czyli odwrócony (invert na tym samym 2gim ekranie stepconf)
to tak pierwsze co przychodzi do głowy
Nie otrzymasz koni wyścigowych krzyżując dwa osły
-
CinekX0
Autor tematu - Specjalista poziom 1 (min. 100)
- Posty w temacie: 98
- Posty: 228
- Rejestracja: 18 paź 2014, 21:36
- Lokalizacja: Poznań
zacharius,
Wystraszyłeś mnie z tym kablem, znalazłem że są 2 typy kabli LPT. Jeden prawidłowy Typu 1-1 a drugi skrzyżowany ale na szczęście kabel mam właściwy.
Poradniki po angielsku przydały się, coś skojarzyłem z PIN17 w ustawieniach że tam jakieś enable ma być
Jako że mam PL linuxa zacząłem majstrować i coś się kręci!
Więc tak, po załączeniu zasilania szafy, sterowników, silniki robią "pyk" i trzymają oś.
Płyta główna zapala diody:
Załączam zasilanie płyty głównej i odpalam Configa.
Jitter wysoki, na razie chcę tylko ustawić minimalne parametry i 1 testy zaliczyć czy to w ogóle żyje.
Komputer docelowy to DELL OPTIPLEX 960, jego Jitter według WIKI to około 4000 więc ładnie. Dostępny na allegro 300-400 pln.
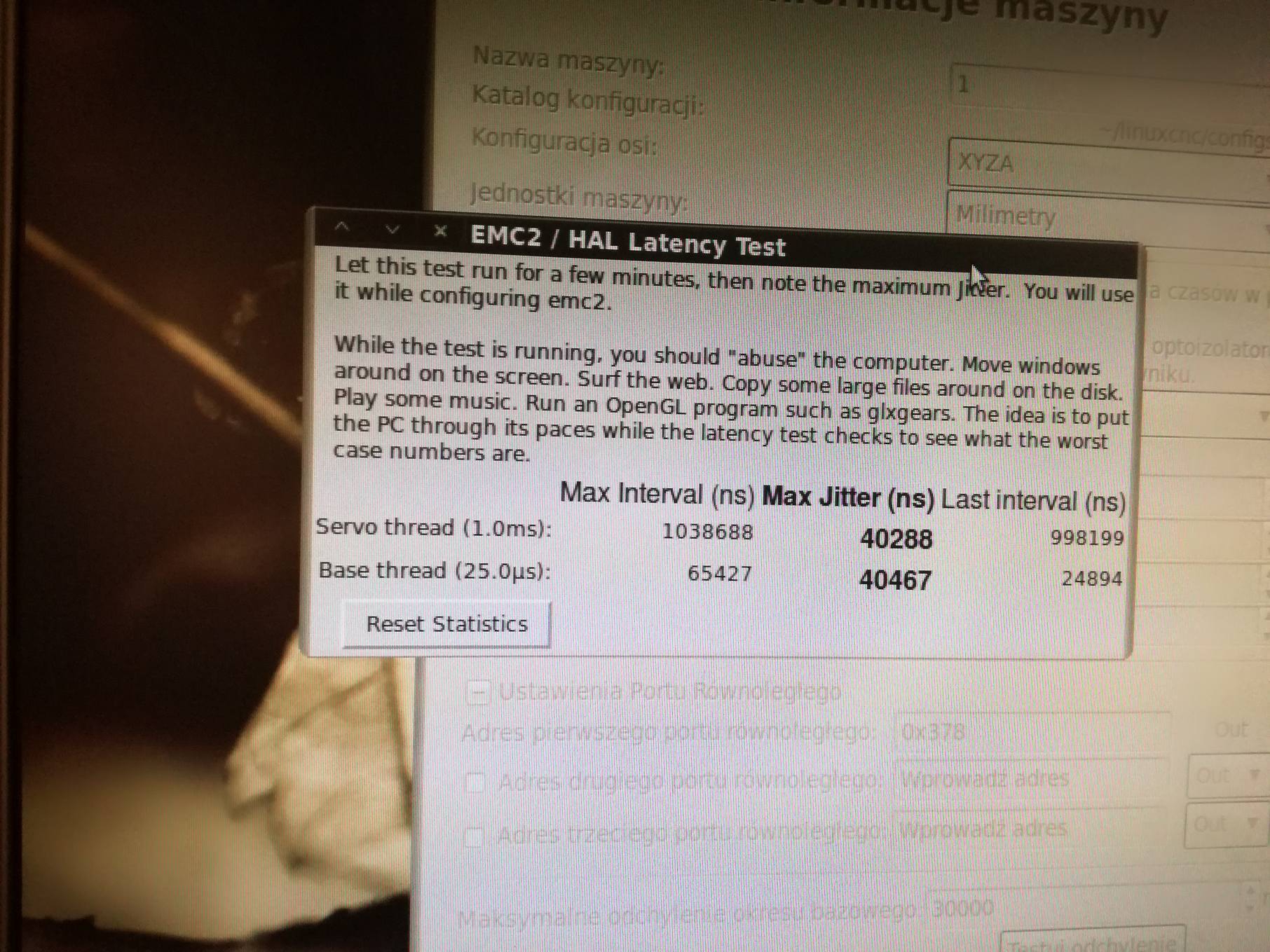
Dane z kapelusza przyznam szczerze, ale przejdźmy dalej.
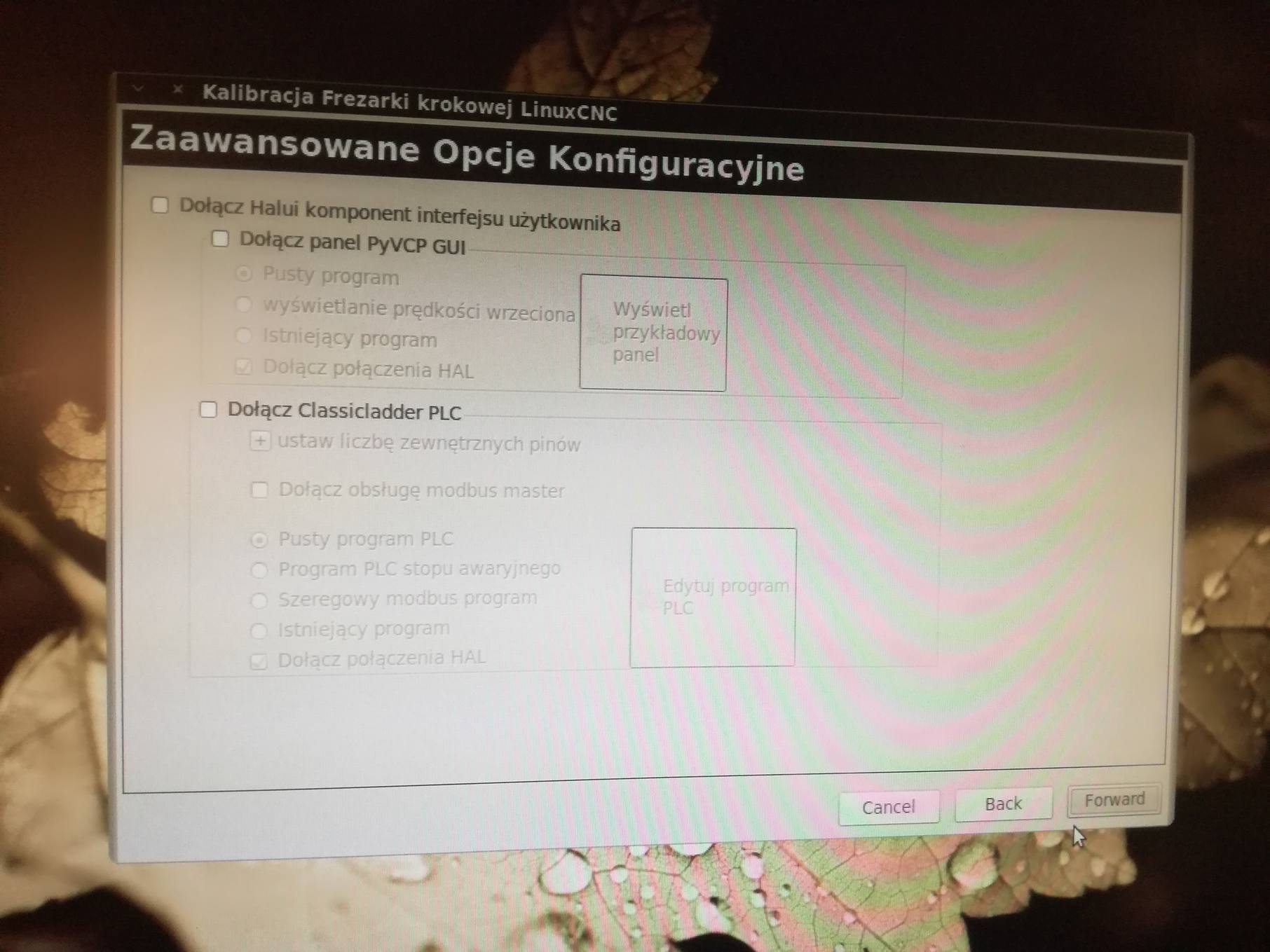
Tutaj nic nie dotykałem,
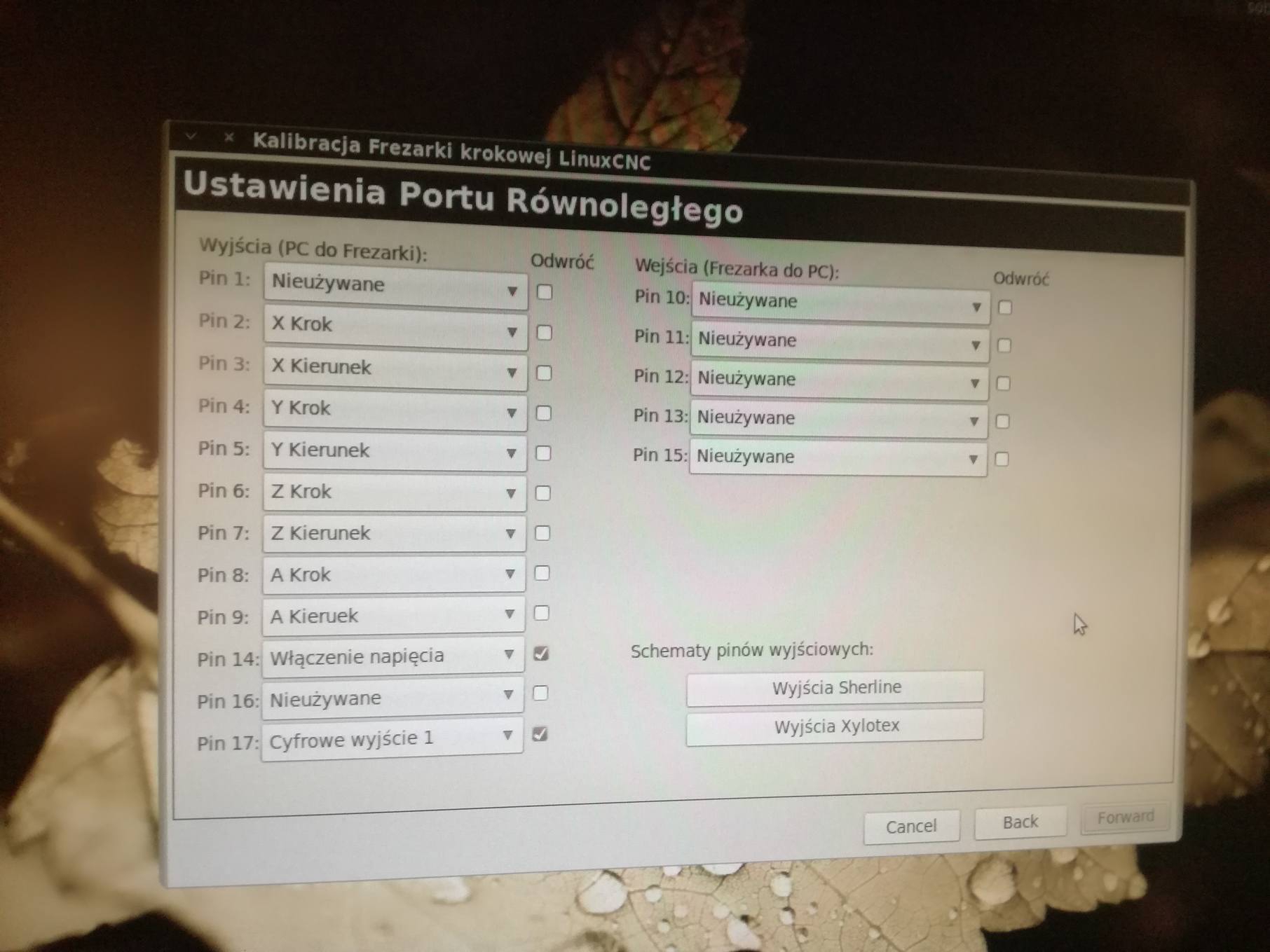
No i trefny PIN17, przedtem od PIN9 miałem wszystko wyłączone
Jak poradził zacharius, odhaczyłem opcję odwróć.
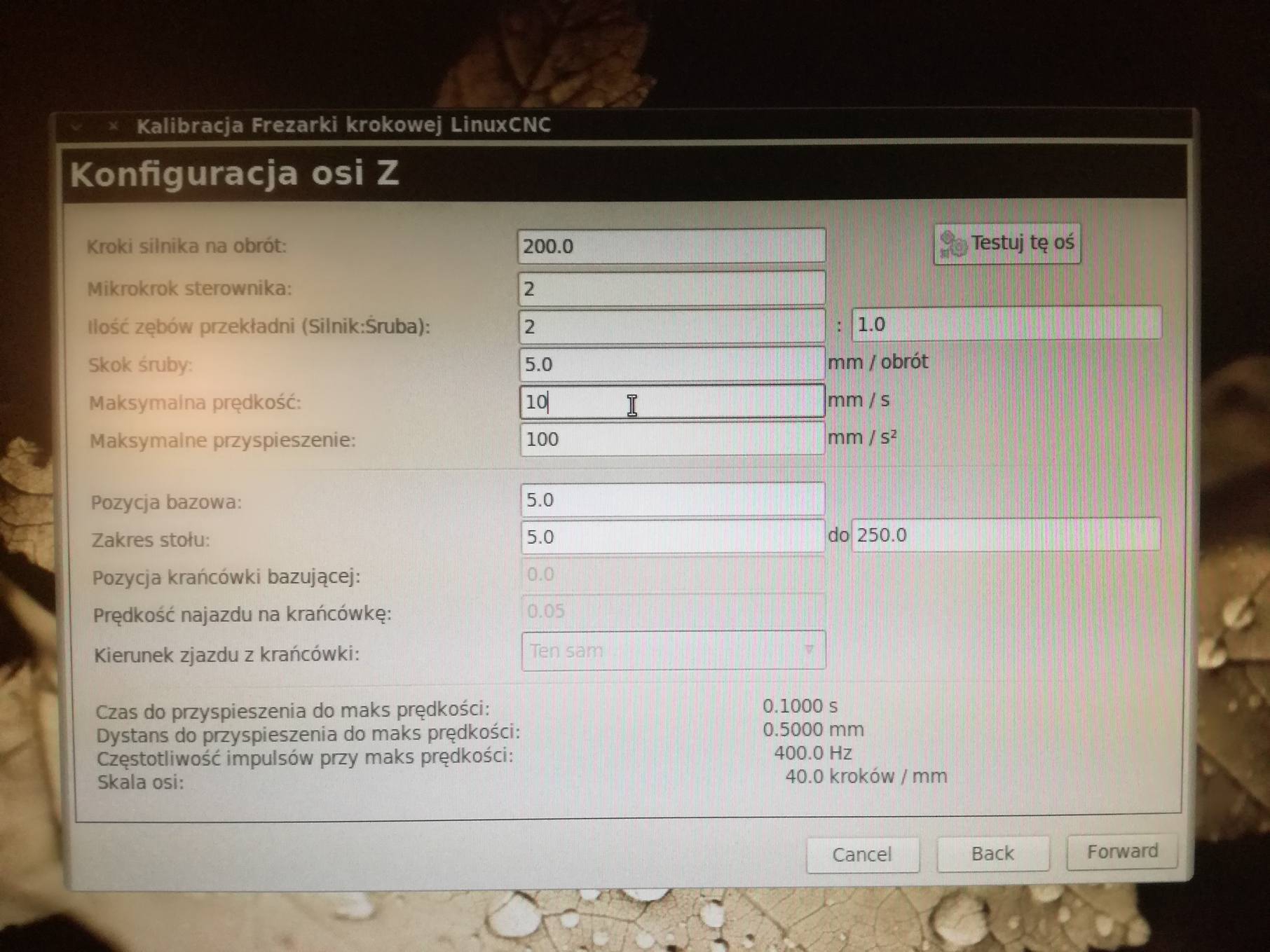
I teraz parametry widoczne, silnik ruszył i kręci się ALE
Skok śruby to 5mm/obr chyba jedyny znany mi parametr.
Silnik ma 1.8* więc 200 kroków na obrót 360* ??
Kwestia jak ustawić pozostałe parametry, jak zwiększam mikrokrok to silnik wykonuje dużo więcej obrotów.
Na zworkach sterownika mam ustawione PULSE/rev na 400 czyli najmniejszą wartość
PEAK czyli prąd ustawiłem na 3,5A tak jest nalepka na silniku więc więcej być nie może?
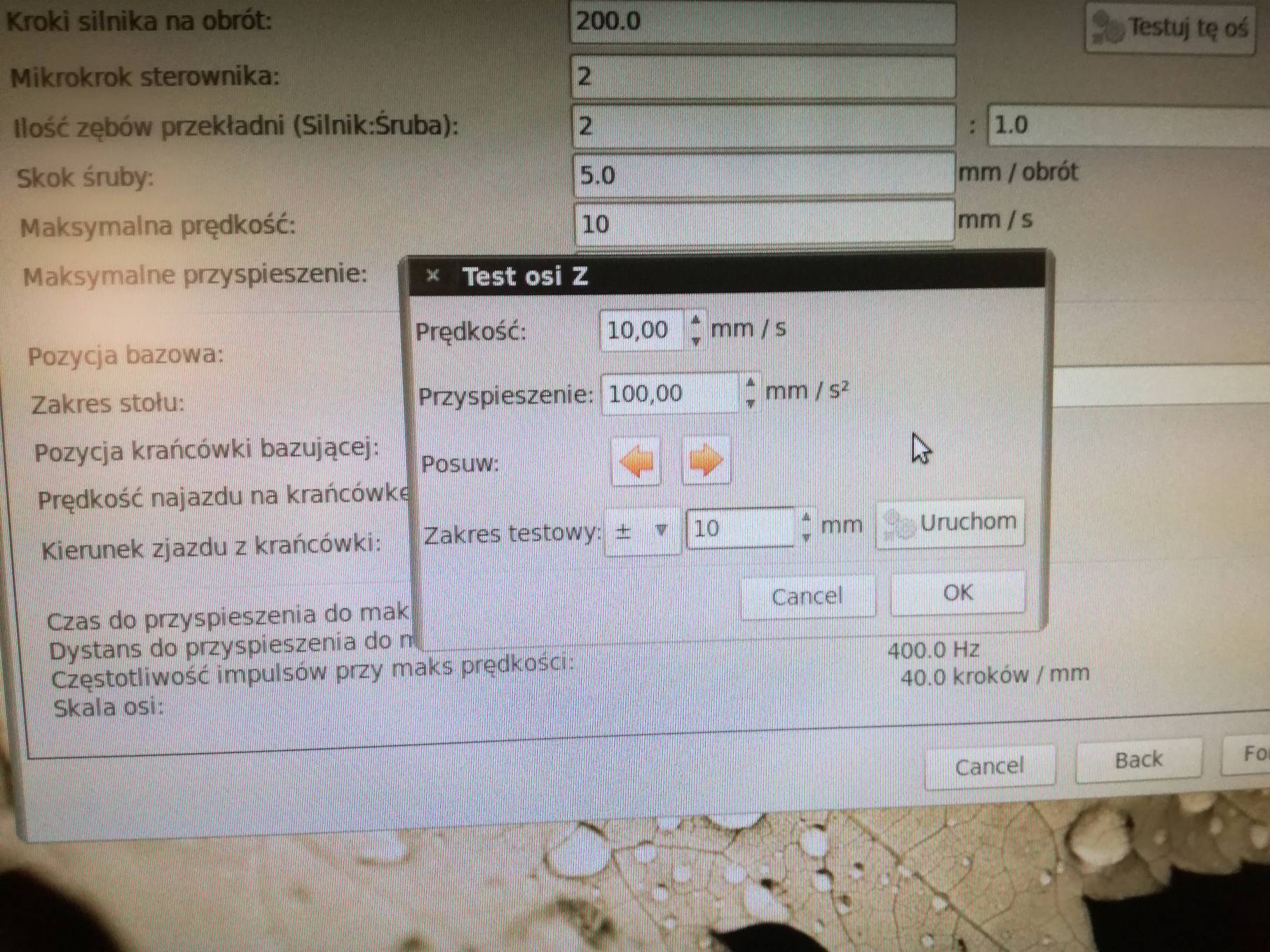
Nie udało mi się dobrać parametrów żeby przy teście 10mm ruchu silnik wykonał 1 pełny obrót.
Na silniku mam kółko zębate 40, śruba 20 więc 2:1 przełożenie
Co ciekawe prędkości nie mogłem uzyskać większej, nie wiem z czego to wynika
Testuję, kombinuję, sugestie mile widziane jak te fanty dobrać do siebie
PS.
zacharius, √
Wystraszyłeś mnie z tym kablem, znalazłem że są 2 typy kabli LPT. Jeden prawidłowy Typu 1-1 a drugi skrzyżowany ale na szczęście kabel mam właściwy.
Długo nie rozumiałem o czym piszesz, ale słowo ENABLE coś mi sugerowało.zacharius pisze:a) enable w jakim jest stanie itp. może trzeba go odwrócić bo jak maszyna piszczy bez logiki a przy włączeniu testu osi przestaje to może być to
b) drabinka rezystorowa w SSK-MB2 podciąga port do +5V wiec stan aktywny portu zdaje się powinien być 0 czyli odwrócony (invert na tym samym 2gim ekranie stepconf)
Poradniki po angielsku przydały się, coś skojarzyłem z PIN17 w ustawieniach że tam jakieś enable ma być
Jako że mam PL linuxa zacząłem majstrować i coś się kręci!
Więc tak, po załączeniu zasilania szafy, sterowników, silniki robią "pyk" i trzymają oś.
Płyta główna zapala diody:
Załączam zasilanie płyty głównej i odpalam Configa.
Jitter wysoki, na razie chcę tylko ustawić minimalne parametry i 1 testy zaliczyć czy to w ogóle żyje.
Komputer docelowy to DELL OPTIPLEX 960, jego Jitter według WIKI to około 4000 więc ładnie. Dostępny na allegro 300-400 pln.
Dane z kapelusza przyznam szczerze, ale przejdźmy dalej.
Tutaj nic nie dotykałem,
No i trefny PIN17, przedtem od PIN9 miałem wszystko wyłączone
Jak poradził zacharius, odhaczyłem opcję odwróć.
I teraz parametry widoczne, silnik ruszył i kręci się ALE
Skok śruby to 5mm/obr chyba jedyny znany mi parametr.
Silnik ma 1.8* więc 200 kroków na obrót 360* ??
Kwestia jak ustawić pozostałe parametry, jak zwiększam mikrokrok to silnik wykonuje dużo więcej obrotów.
Na zworkach sterownika mam ustawione PULSE/rev na 400 czyli najmniejszą wartość
PEAK czyli prąd ustawiłem na 3,5A tak jest nalepka na silniku więc więcej być nie może?
Nie udało mi się dobrać parametrów żeby przy teście 10mm ruchu silnik wykonał 1 pełny obrót.
Na silniku mam kółko zębate 40, śruba 20 więc 2:1 przełożenie
Co ciekawe prędkości nie mogłem uzyskać większej, nie wiem z czego to wynika
Testuję, kombinuję, sugestie mile widziane jak te fanty dobrać do siebie
PS.
zacharius, √
")






