



Sterownik serwo DC na STM32F4 / HIP4081A
-
 ursus_arctos
ursus_arctos
Autor tematu - Lider FORUM (min. 2000)
")
- Posty w temacie: 70
- Posty: 2083
- Rejestracja: 11 cze 2011, 18:29
- Lokalizacja: Warszawa / Lublin


-
piotr_olbrysz
- Specjalista poziom 2 (min. 300)
")
- Posty w temacie: 16
- Posty: 478
- Rejestracja: 04 mar 2012, 13:51
- Lokalizacja: Warszawa
-
ursus_arctos
Autor tematu - Lider FORUM (min. 2000)
- Posty w temacie: 70
- Posty: 2083
- Rejestracja: 11 cze 2011, 18:29
- Lokalizacja: Warszawa / Lublin
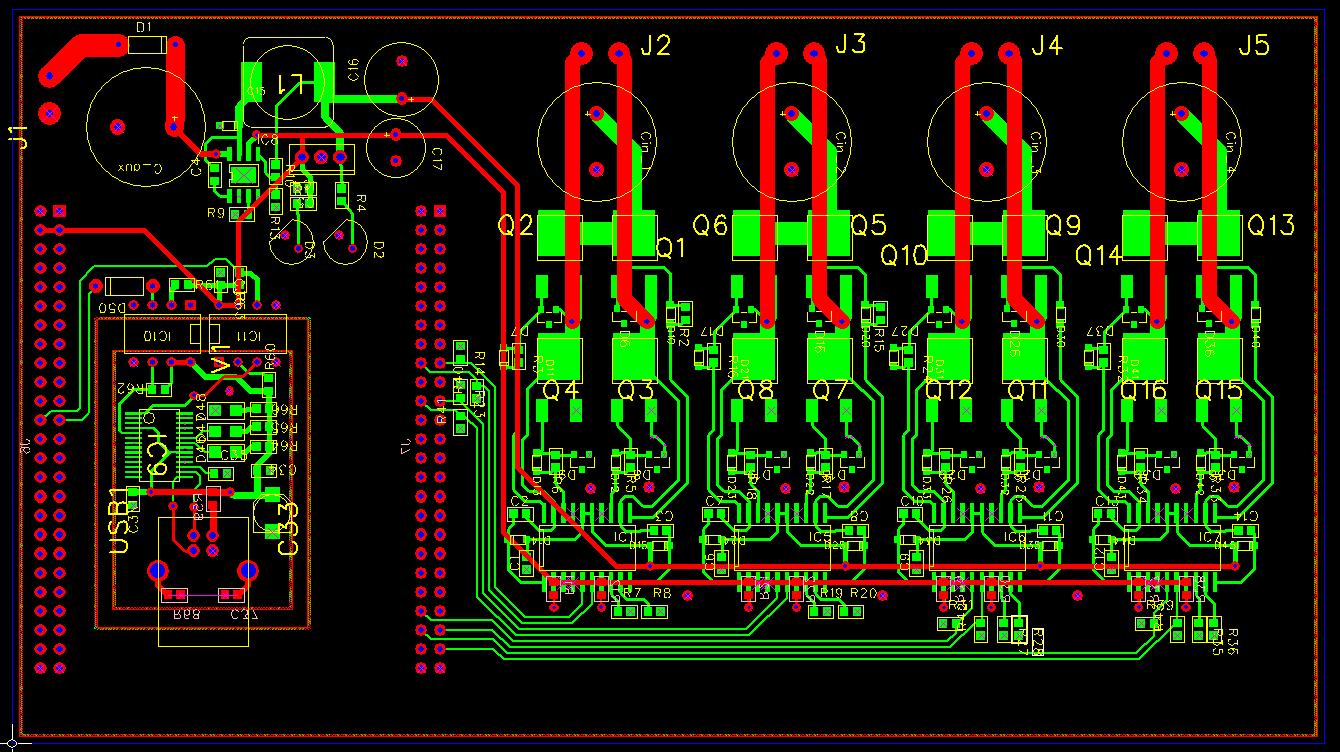
Jest filtrowanie kondensatorem 1nF, pullupy 10k - przy zastosowaniu wielokrotnego (x3) próbkowania wystarcza; bez filtra cyfrowego - nie. Swoją drogą, to na płytce prototypowej jedna ze ścieżek od enkodera idzie bardzo blisko tranzystora mocy - to na pewno nie pomaga - ale filtr cyfrowy naprawdę daje radę.
< Furkę widziałem w Warszawie na Służewcu - okolice ul. Obrzeżnej; 52.173789 N 21.001752 E >
< Furkę widziałem w Warszawie na Służewcu - okolice ul. Obrzeżnej; 52.173789 N 21.001752 E >
-
piotr_olbrysz
- Specjalista poziom 2 (min. 300)
- Posty w temacie: 16
- Posty: 478
- Rejestracja: 04 mar 2012, 13:51
- Lokalizacja: Warszawa
-
ursus_arctos
Autor tematu - Lider FORUM (min. 2000)
- Posty w temacie: 70
- Posty: 2083
- Rejestracja: 11 cze 2011, 18:29
- Lokalizacja: Warszawa / Lublin
Na zepsutym OS352 widać przysłowiowe g...no - tam oglądanie prostokąta 100kHz już jest trudne, o nieregularnych szpilkach można zapomnieć
Wiem, że ścieżki są źle poprowadzone, kable nie są ekranowane, etc, etc.
Możliwe, że zrezygnuję z jednoczęściowych gniazd do silników na płycie - zrobię gniazdo na panelu, z którego kable mocy będą szły w jedno miejsce płyty, a kable od enkodera w inne.
Wiem, że ścieżki są źle poprowadzone, kable nie są ekranowane, etc, etc.
Możliwe, że zrezygnuję z jednoczęściowych gniazd do silników na płycie - zrobię gniazdo na panelu, z którego kable mocy będą szły w jedno miejsce płyty, a kable od enkodera w inne.
-
piotr_olbrysz
- Specjalista poziom 2 (min. 300)
- Posty w temacie: 16
- Posty: 478
- Rejestracja: 04 mar 2012, 13:51
- Lokalizacja: Warszawa
-
ursus_arctos
Autor tematu - Lider FORUM (min. 2000)
- Posty w temacie: 70
- Posty: 2083
- Rejestracja: 11 cze 2011, 18:29
- Lokalizacja: Warszawa / Lublin
No nic, oczywiście będę dalej kombinował - w międzyczasie posiedziałem nad algorytmami (jeszcze estymator prędkości muszę poprawić, bo w tej chwili generuje głupoty przy większych prędkościach) - efekt jest taki, że sinusa 4Hz (amplituda 1 obrót) napęd wykonuje z dokładnością do 1/100 obr w każdej chwili. Przy 2Hz już jest 1/200 obr. Jak złapię silnik za wał (ręką przez szmatę) to uchyb nadal nie wychodzi ponad 1/100 - wychodzi na to, że regulator działa bardzo ładnie i odrzucanie uchybu jest na dobrym poziomie.
Algorytmy raczej kiedyś opiszę na forum dla potomności, może w oddzielnym wątku - trochę zabawy z tym było, nie wszyscy muszą się tak męczyć i odkrywać Amerykę.
Do zrobienia zostały mi jeszcze:
a) feedforward przyśpieszenia (obecnie mam feedfowrawd prędkości)
b) autotuning (przynajmniej części feedforward - strojenie jest łatwe dla maszyny, uciążliwe dla człowieka)
Jeżeli zrobię autotuning regulatora PIV, to maszyna będzie wymagała jedynie wprowadzenia rozdzielczości enkodera i przełożenia - no ale to będzie przypadek idealny
-
ursus_arctos
Autor tematu - Lider FORUM (min. 2000)
- Posty w temacie: 70
- Posty: 2083
- Rejestracja: 11 cze 2011, 18:29
- Lokalizacja: Warszawa / Lublin
")
-
ursus_arctos
Autor tematu - Lider FORUM (min. 2000)
- Posty w temacie: 70
- Posty: 2083
- Rejestracja: 11 cze 2011, 18:29
- Lokalizacja: Warszawa / Lublin
Wiem, ale projektowanie płytki pod procek jest ciut bardziej skomplikowane - większa szansa wtopy, właściwie mało prawdopodobne, aby się udało zrobić wszystko dobrze za pierwszym razem - brakuje w necie jakiegoś tutorialu/przykładu minimalnej płytki z STM32F407Vxx6 - jak podłączyć kwarc, zasilanie, które nogi odprzęgać kondensatorami do masy, jak podpiąć SWD etc etc. Z samego datasheetu czy schematów discovery można to oczywiście wyciągnąć, ale prawdopodobnie gdzieś zostanie popełniony jeden głupi błąd...
A Discovery już miałem i jest tanie (89zł) - tańsze, niż 2 procesory w wersji TQFP64.
Jeżeli kiedyś będę robił własną płytkę pod STM32 (wtedy wrzucę tam LAN), to wypuszczę jej nogi w kompatybilny sposób i będę mógł zrobić "kanapkę" z moim sterownikiem.
A Discovery już miałem i jest tanie (89zł) - tańsze, niż 2 procesory w wersji TQFP64.
Jeżeli kiedyś będę robił własną płytkę pod STM32 (wtedy wrzucę tam LAN), to wypuszczę jej nogi w kompatybilny sposób i będę mógł zrobić "kanapkę" z moim sterownikiem.






