



")
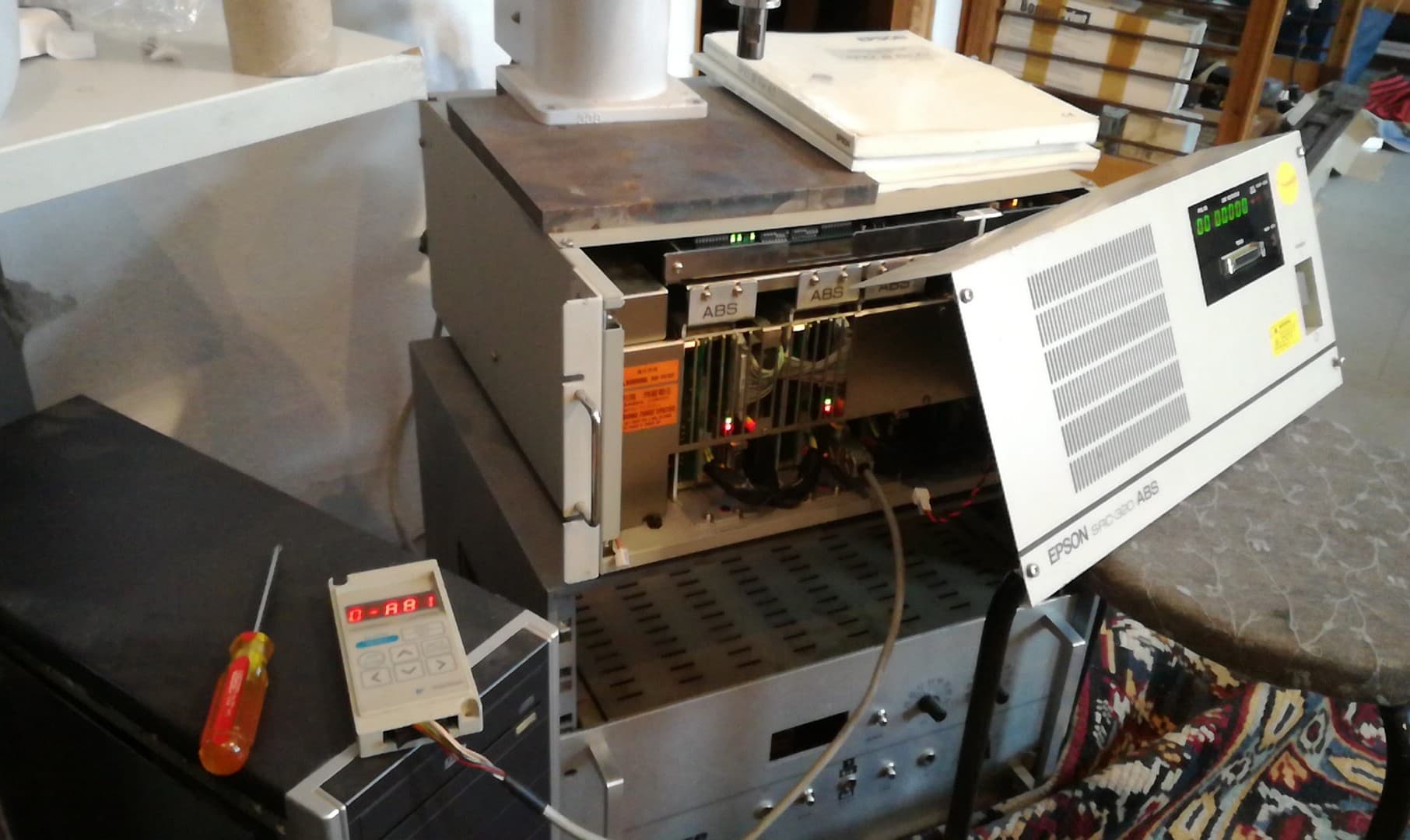
wpadł mi w ręce niewielki ale bardzo sensowny robot scara firmy Epson wraz ze sterownikiem. Jest on w idealnym stanie mechanicznym i generalnie wygląda na nieużywany (ani grama kurzu na elektronice) ale ma jeden istotny mankament, liczy sobie już 20lat.
Mechanika w robotach scara Epsona nie wiele się zmieniła od tego czasu bo już była na bardzo wysokim poziomie, natomiast sterowanie to już niestety zabytek. W związku z tym pojawił mi się w głowie pomysł żeby zmodernizować wymieniając układ sterujący na PLC i zostawiając całą resztę komponentów.
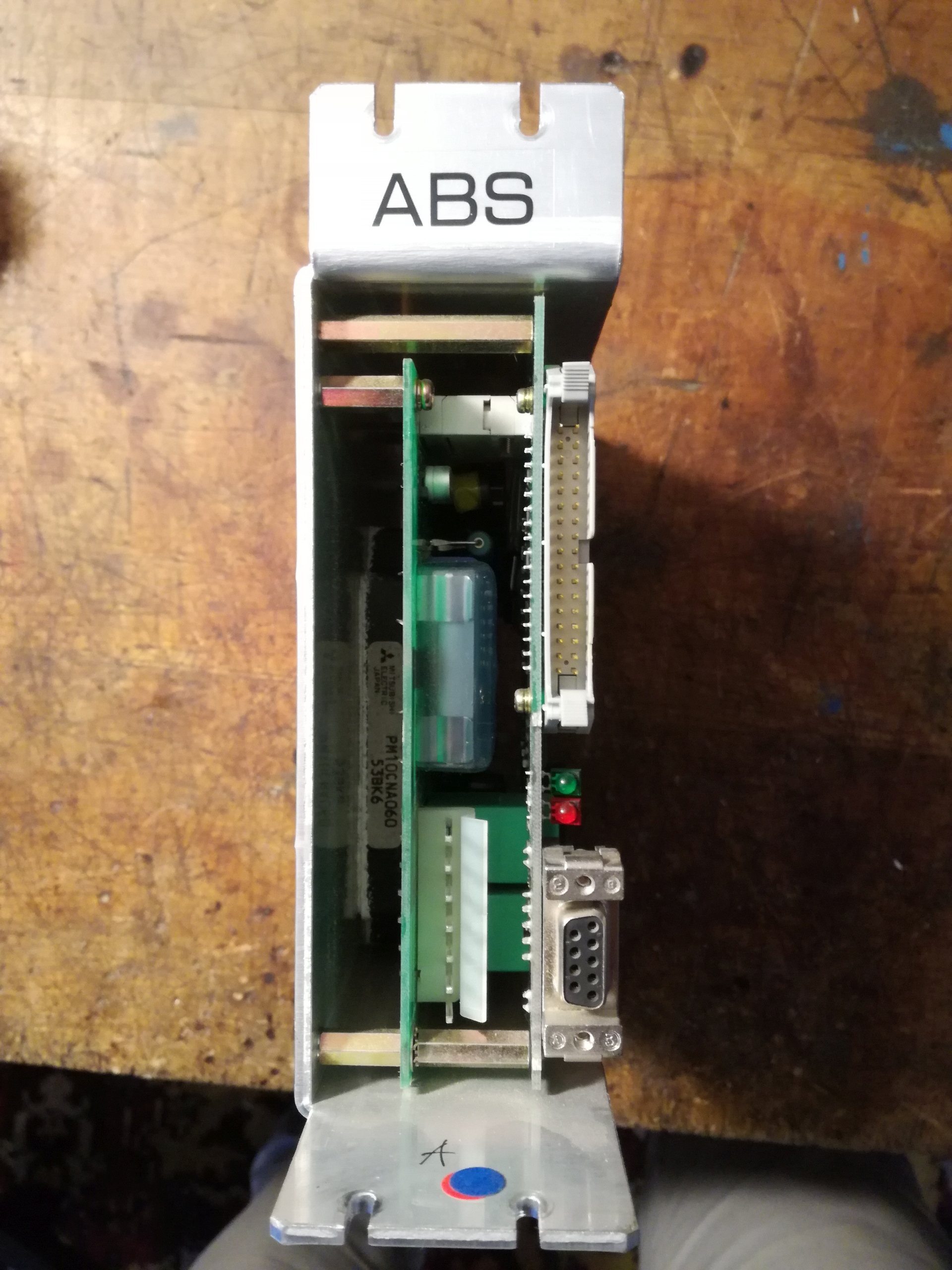
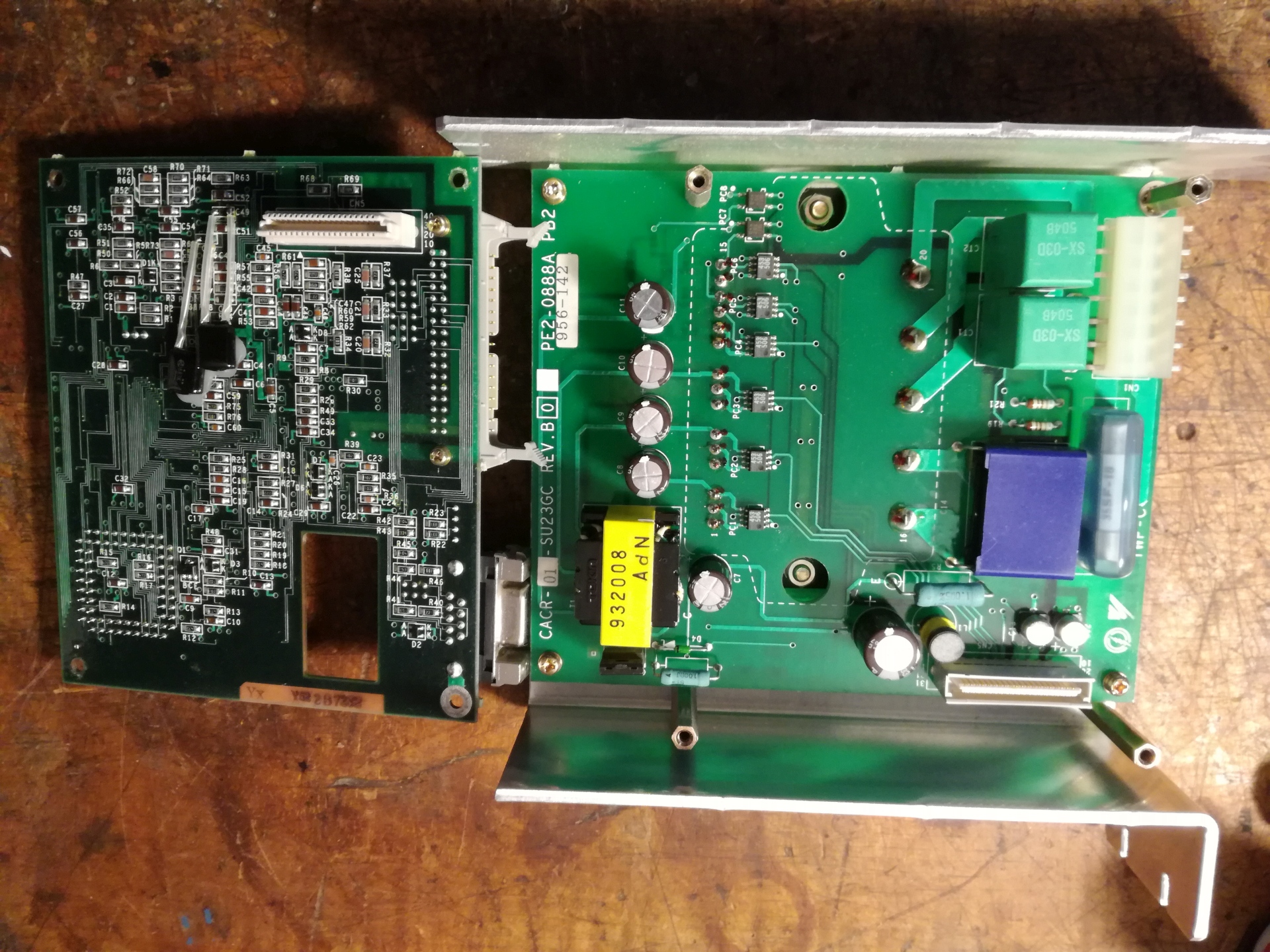
Po rozebraniu sterownika wyłoniły się 4 serwonapędy Yaskawa CACR-xx-SU23GC, zapewne zostały opracowane pod wymagania Epsona do tej serii robotów, niestety jak łatwo się domyślić brakuje do nich jakiejkolwiek dokumentacji.
Stan mojej wiedzy na ich temat jest następujący:
- Współpracują z serwomotorami Sigma I z enkoderami absolutnymi (takie są w robocie)
- Programator ręczny JUSP-OP02A jest z nimi kompatybilny i mam dostęp do parametrów
- Serwopacki posiadają parametry tylko do CN-23, w związku z tym mają inną specyfikację niż SGD/SGDA/SGDB/DR2/CAC-SR/CACR-HR
- Nie udało mi się nawiązać komunikacji przez SigmaWIN+, miewałem z tym problemy więc ciężko jednoznacznie powiedzieć czemu
Co potrzebuję wiedzieć:
- Jaką mają metodę sterowania i gdzie zamyka się pętla sprzężenia zwrotnego od enkoderów, stawiam na sygnał analogowy i wyprowadzenie sygnałów z enkodera do elementów sterowania które chcę usunąć.
- Jakie są sygnały i ich rozkład na gnieździe IDC
Stawiam że te serwopacki mimo wszystko zbudowane są na wzór innych produktów Yaskawy i będę próbował się doszukać jakichś analogii.
Moje podejrzenia:
- Serwopacki wykorzystują:
--- Sygnał SEN, w "Monitor Mode" w programatorze ręcznym wyświetlało mi się, że jest ten sygnał załączony.
--- Sygnał SON w "Monitor Mode" w programatorze ręcznym wyświetlało mi się, że jest ten sygnał wyłączony.
--- Sygnał ALM
--- Wszystkie kanały enkodera są wprowadzone do serwopacka
--- Bateria do podtrzymania pamięci jest wpięta na jakieś dwa piny
--- Serwopacki wykorzystują napięcie +24VDC
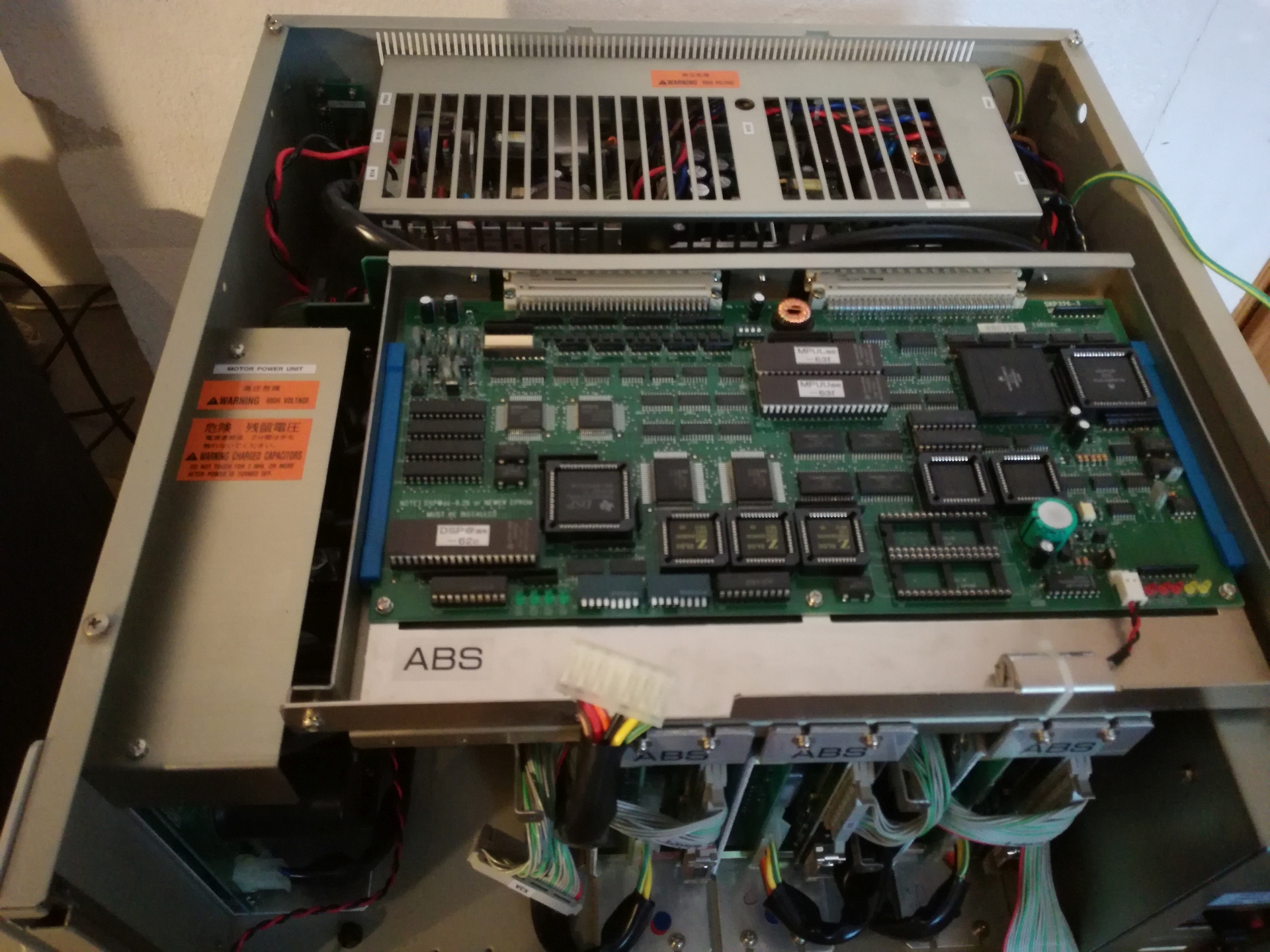
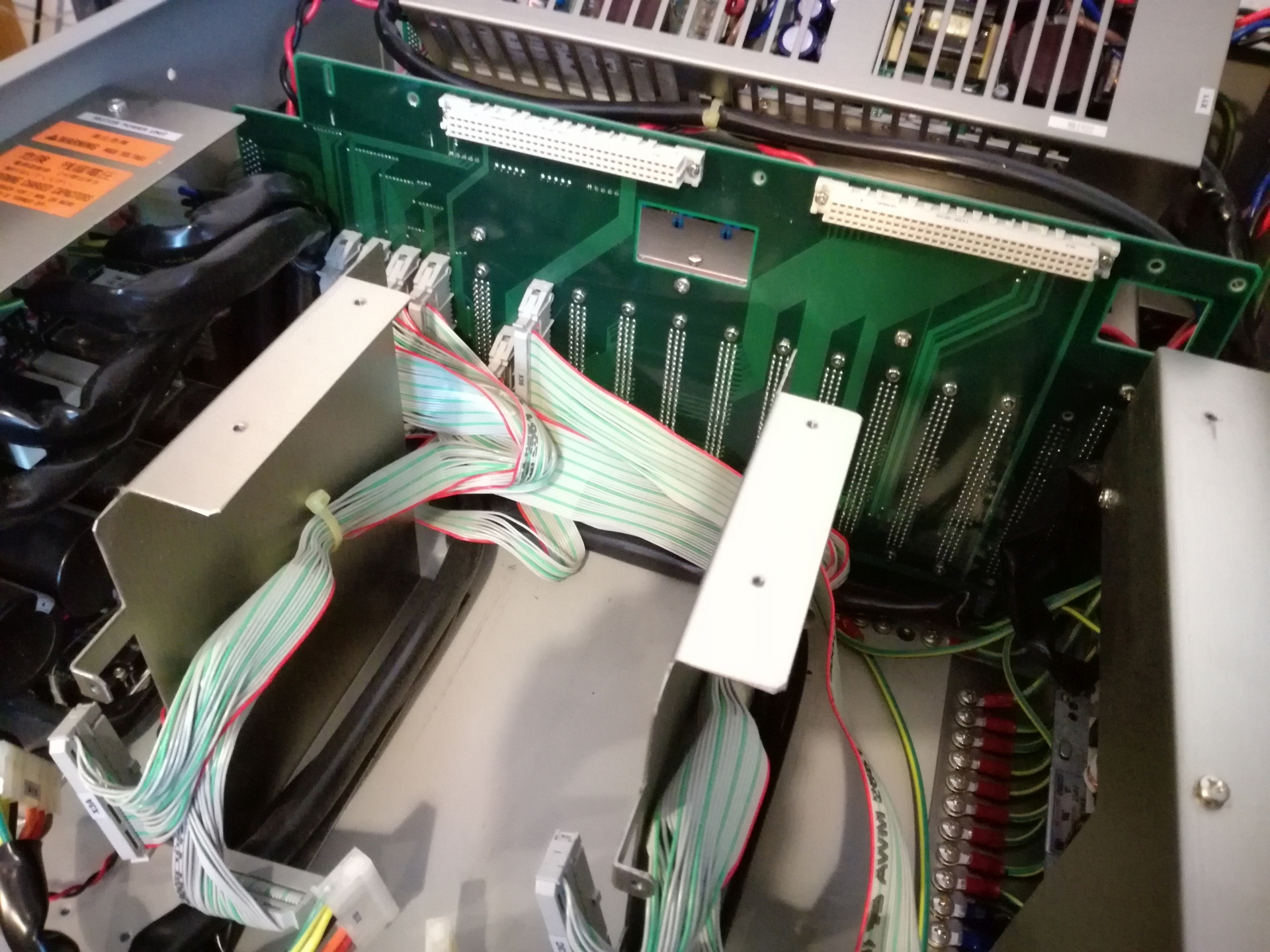
Z dokumentacji Epsona mam dokładną rozpiskę sygnałów z robota, idą one poprzez taśmę IDC na płytę która wygląda jakby służyła wyłącznie do rozprowadzania sygnałów pod odpowiednich częściach kontrolera. Teoretycznie mogę prześledzić trasę wszystkich znanych mi sygnałów oraz zasilania +5, +12, +24 i baterii do podtrzymania pamięci, będzie to jednak dosyć ciężkie. Niestety wciąż nie rozwiązuje to problemu odnośnie funkcjonalności serwonapędów oraz rozkładu pinów nie powiązanych bezpośrednio z serwomotorami.
Może ktoś się spotkał z podobnymi napędami Yaskawy i ma do nich dokumentację lub wie gdzie ją znaleźć?
Istnieją jakieś sposoby dla takiego szukania sygnałów?
Jakieś wskazówki i sugestie jak się za to zabrać?
Będę wdzięczny za pomoc






")






