




Jestem nowy i przepraszam z góry jeśli nie prawidłowy dział ale myślę że będzie ok.
Planuje wykonać robota do malowania który tak naprawdę będzie służył do malowania powierzchni płaskich i poruszał sie na samobieżnej maszynie.
Proszę o doradztwo na jakiej posuwnicy liniowej mógłby poruszać się pistolet ważący około 1.5kg. Długość listwy to 3m do pistoletu będą podłączone przewody doprowadzające powietrze i płyny, które zapewne też będą stanowiły jakiś opór.
Najważniejszą kwestią tego rozwiązania jest to że jest to praca która będzie powodowała pylenie i wymagane jest zastosowanie takiej posuwnicy lub wózka , który będzie na to odporny.
Dostałem specyfikację z pewnego sklepu internetowego ale nie wiem czy to będzie się do końca nadawało i przed zakupem chciałbym prosić o doradztwo fachowców lub sklepy zainteresowane sprzedażą podzespołów.
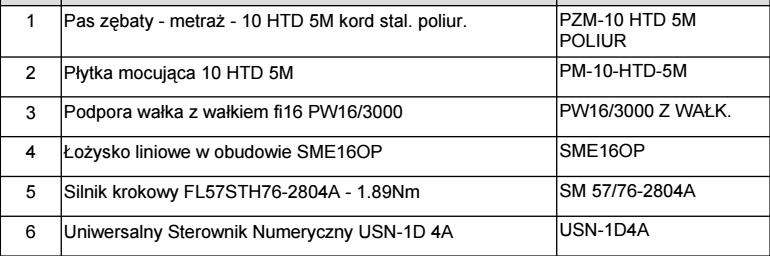
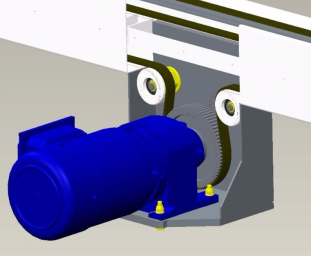
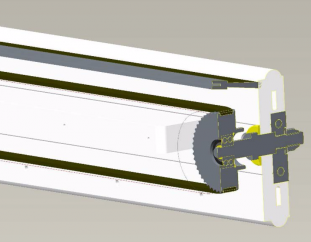
W załączniku info elementów jakie dostałem do zakupu i zdjęcia poglądowe tego co chce osiagnać


")
")






