



")
Od wielu miesięcy walcze z błędem (RTAPI: ERROR: Unexpected realtime delay on task 1...).
Prowadziłem testy z UBUNTU od ver. 6.06, 8.04, 10.04 (EMC2 2.2, 2.3, 2.4.6) bez większego sukcesu.
Komputer sterujący:
Płyta główna: ASROCK K8NF4G
Procesor: AMD Athlon64 3200+
RAM: 1,5GB
HDD: Segate 4,3GB
Grafika: PCI-E ATI RADEON X300 (zintegrowana NV44)
Sterownik SSK-B03
Podział kroku: 1:16
Max STEP: 28kHz
Przy zainstolowanym sterowniku nvidia max jitter lecial w kosmos przekraczając jakie kolweik normy.
Przy sterowniku VESA driver i rozdzielczości ekranu 800x600, max jitter wahał się na poziomie 28-60ns.
Dziś nastąpił przełom, po zainstalowaniu karty graficznej ATI na PCI-E, przy rozdzielczości 1280x1024x75Hz
max jitter zatrzymał się na poziomie 14ns ( wykonałem wszelkie instrukcje w celu obciązenia komputera i pracuje na nim od 3 godz.).
Jest nadzieja że może wreszcie się uda, ale to okaże się przy dłuższej pracy maszynki.
Postanowiłem się wreszcie wziąść za ten błąd, tu mam pytanie do kolegów.
Osiągnięty posuw FMAX=2000mm (wyżej zacina się silnik), przyszło mi do głowy że może źle konfiguruje charakterystyke sygnałów dla sterownika SSK-B03.
Opis z instrukcji obsługi:
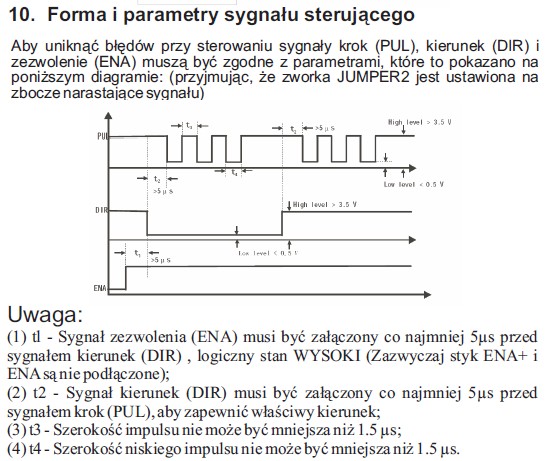
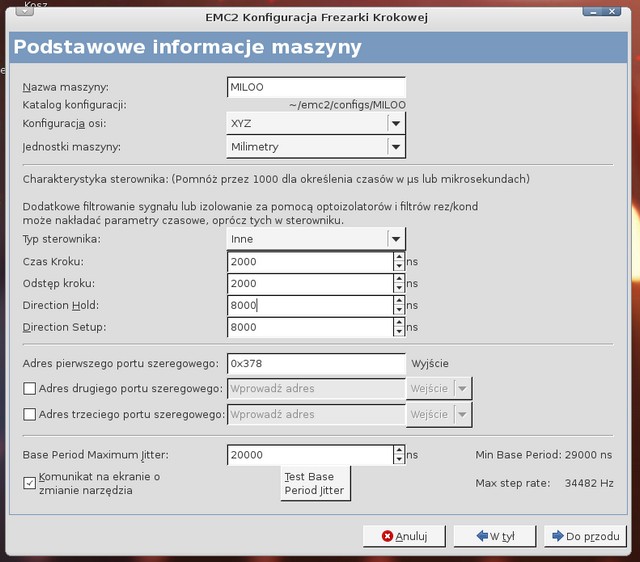
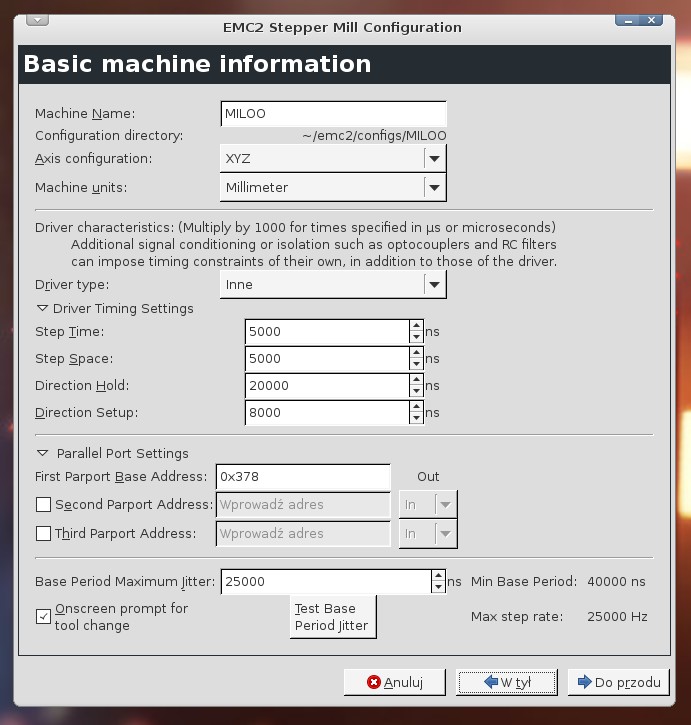
Konfiguracja EMC2:
Aktualny wynik Latency Test:
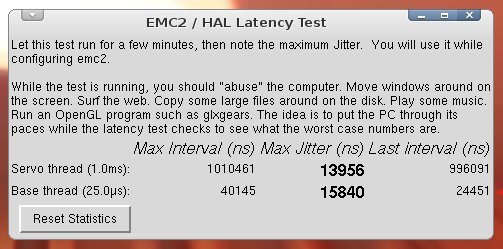
Wydaje mi się że parametry są dobrze podane, nie wiem ile zapasu należy przyjąć dla danych czasów, oraz jaką nadwyżke dodać do otrzymanego wyniku z Latency test (który jest ważny Servo thread czy Base thread), macie jakieś propozycje?
Pozdrawiam
Paweł



")

")






