Alvar4 pisze:Pierwszy!

Bardzo ładna i estetyczna robota. Prawie nie ma się do czego przyczepić
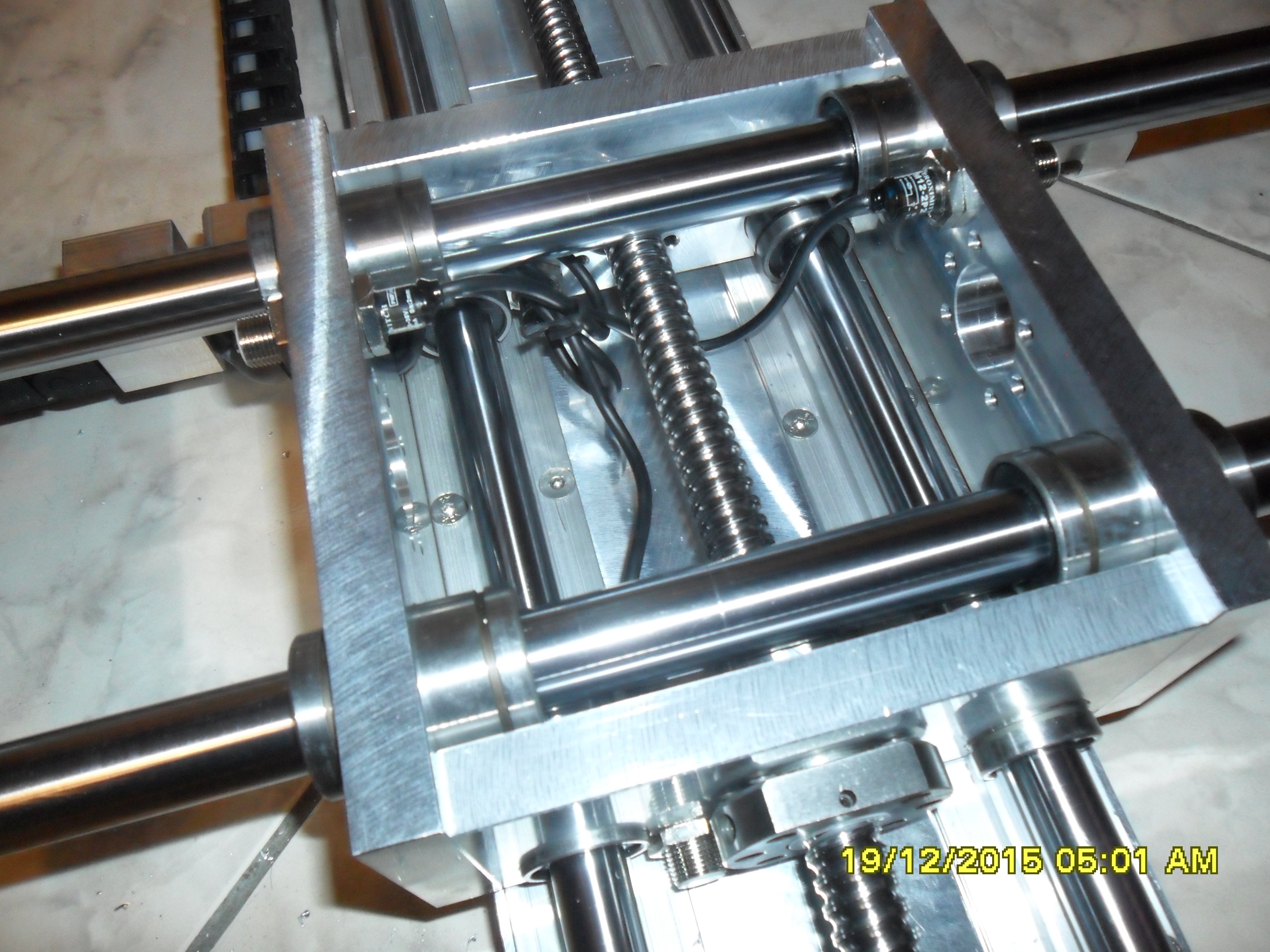
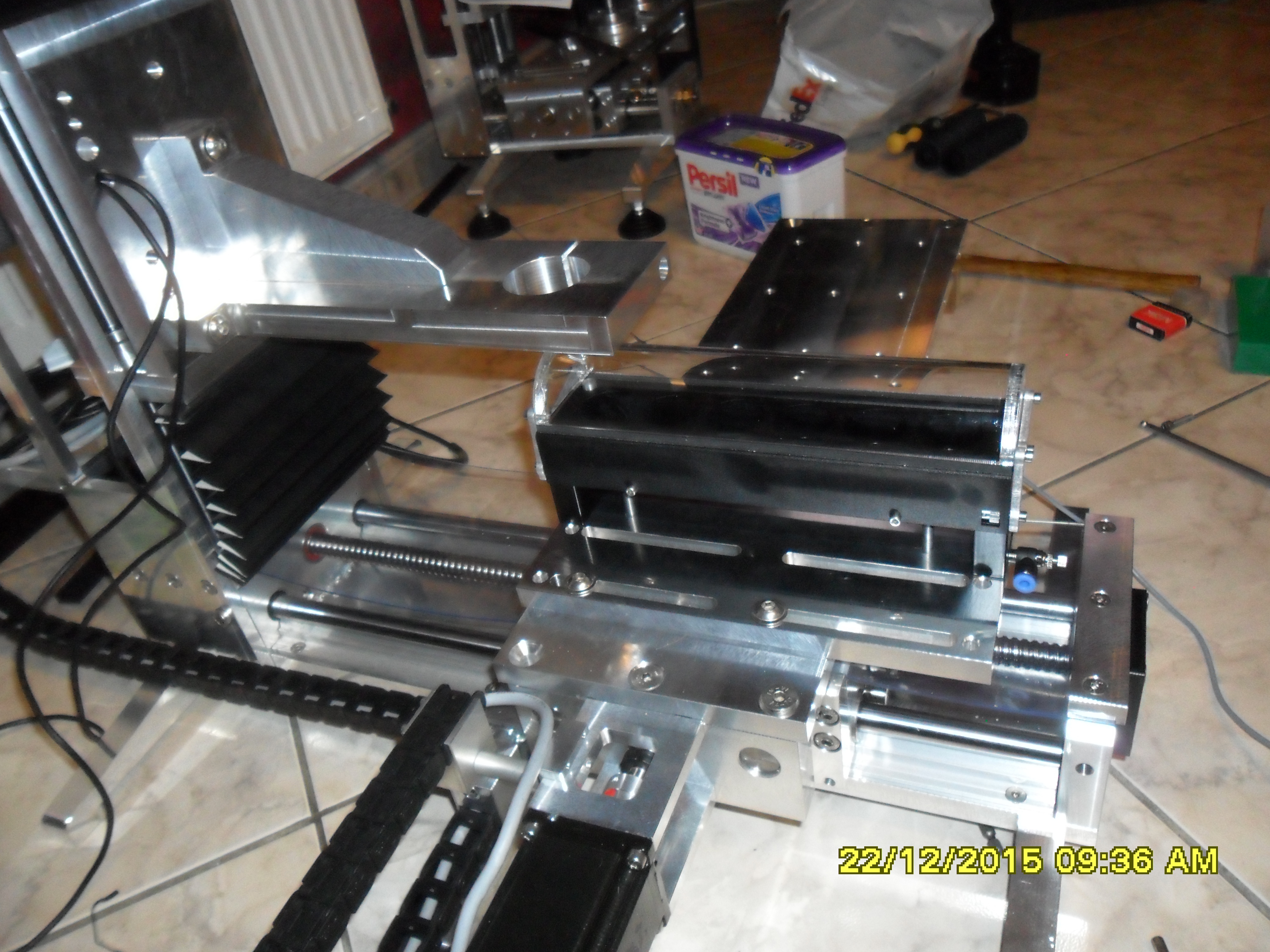
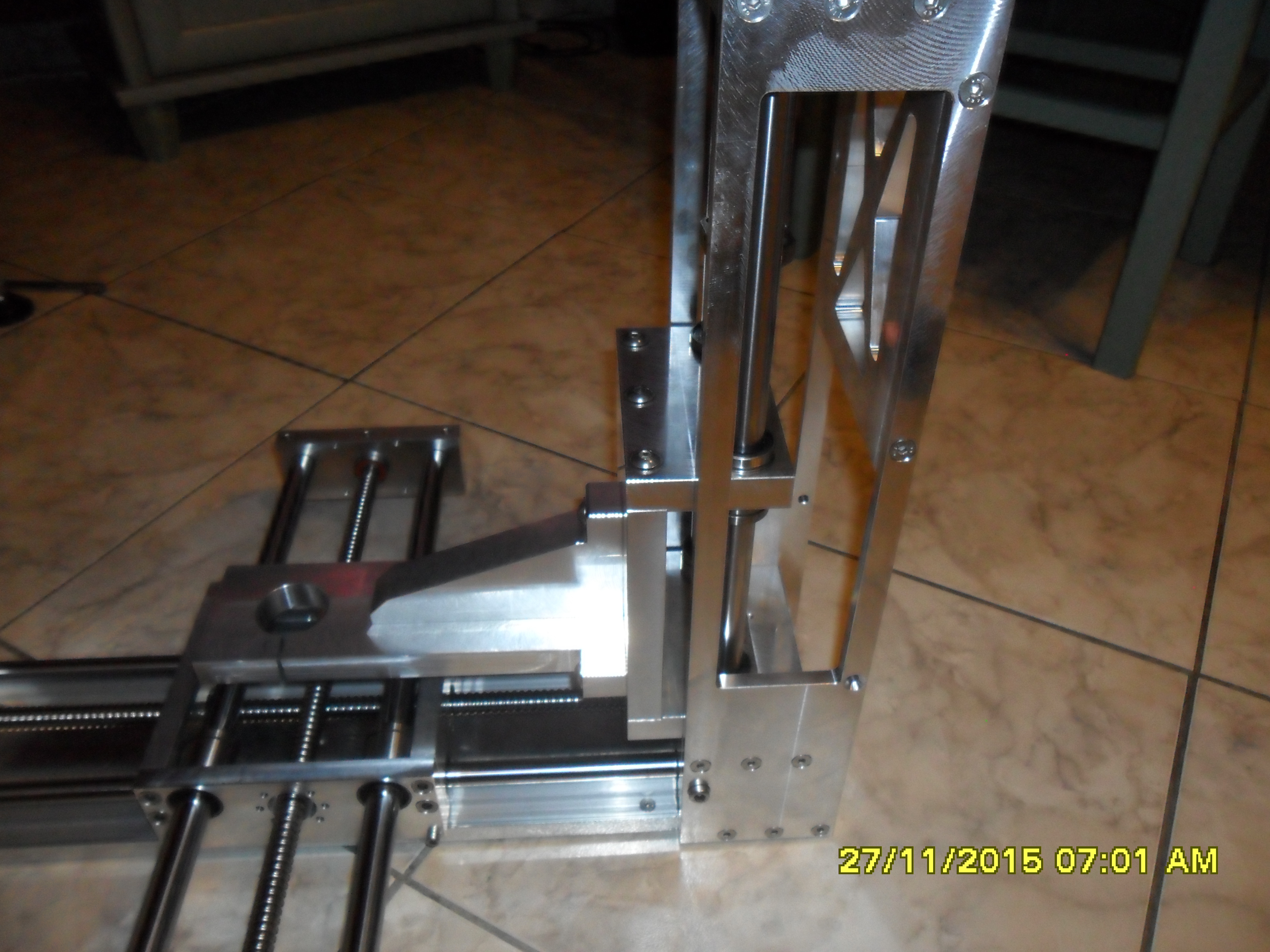
Szkoda że nie dałeś wałków podpartych na stoliku od osi X ale tak tez jest w sumie OK. Napisz jeszcze jakiej średnicy zastosowałeś prowadnice. Łożyska liniowe w stoliku zamontowałeś na wcisk czy jak bo nie widać żadnego mocowania. Jak dla mnie robota na piątkę z plusem

dziękuję, troszkę roboty to kosztowało !!..
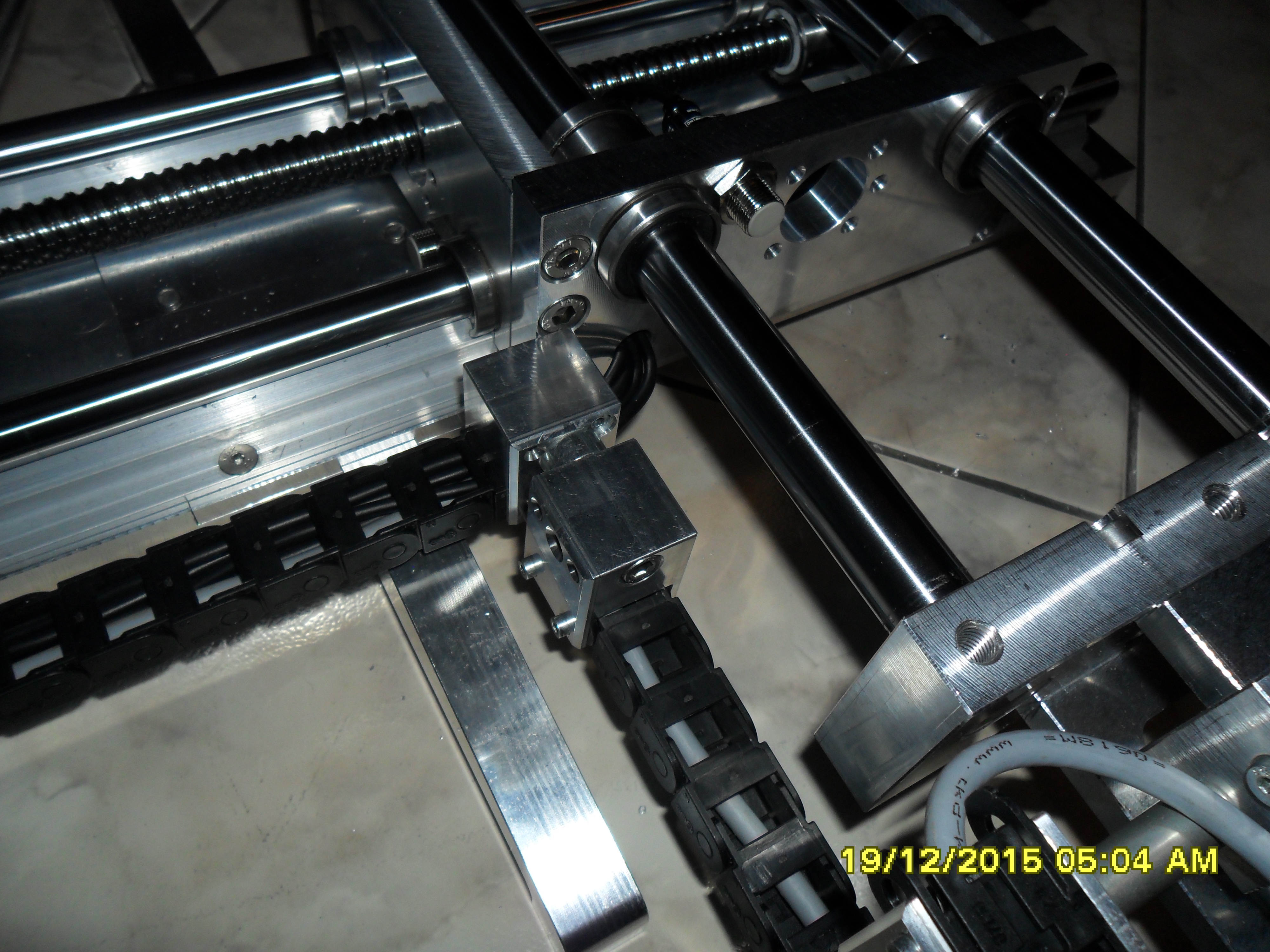
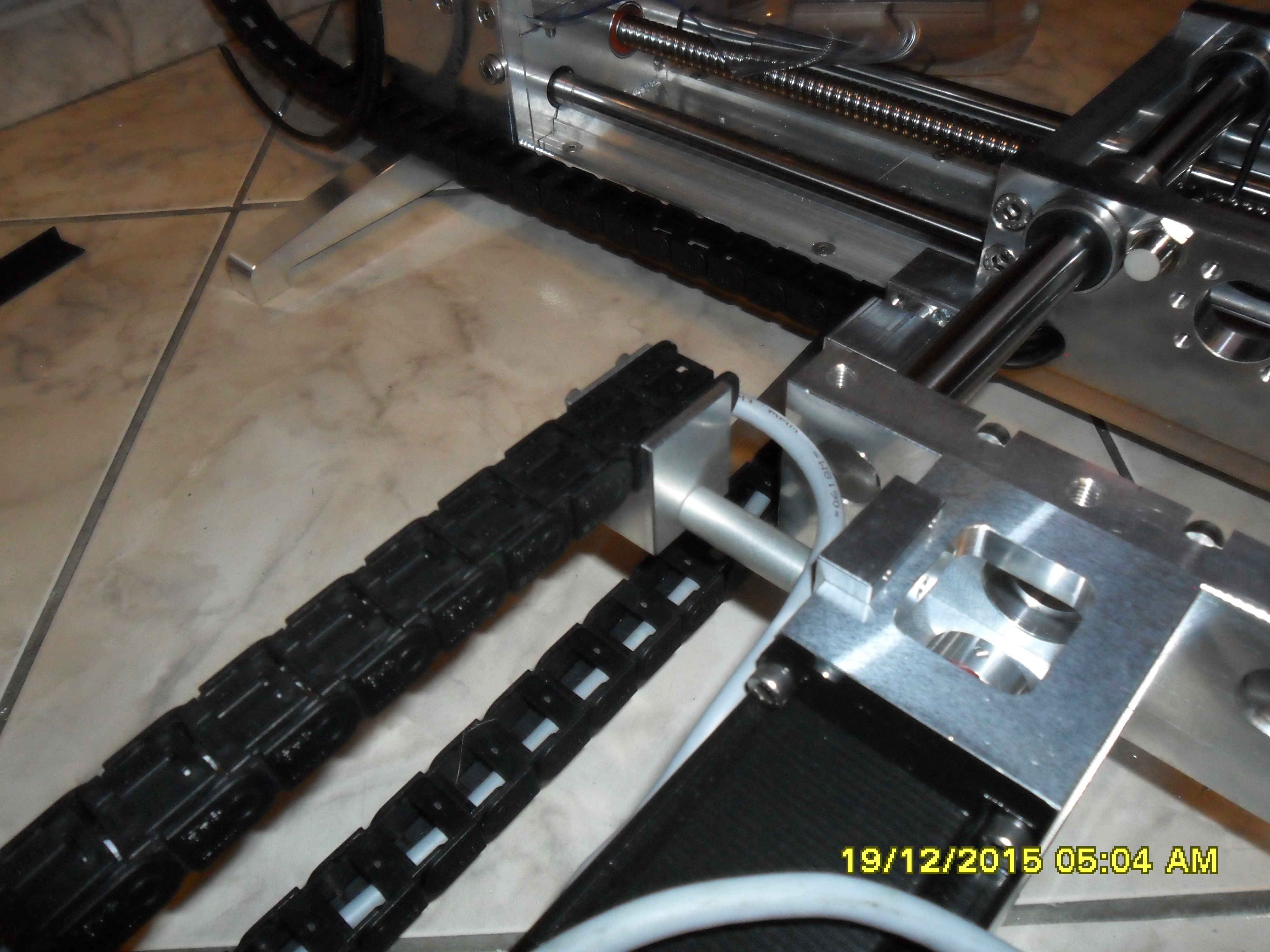
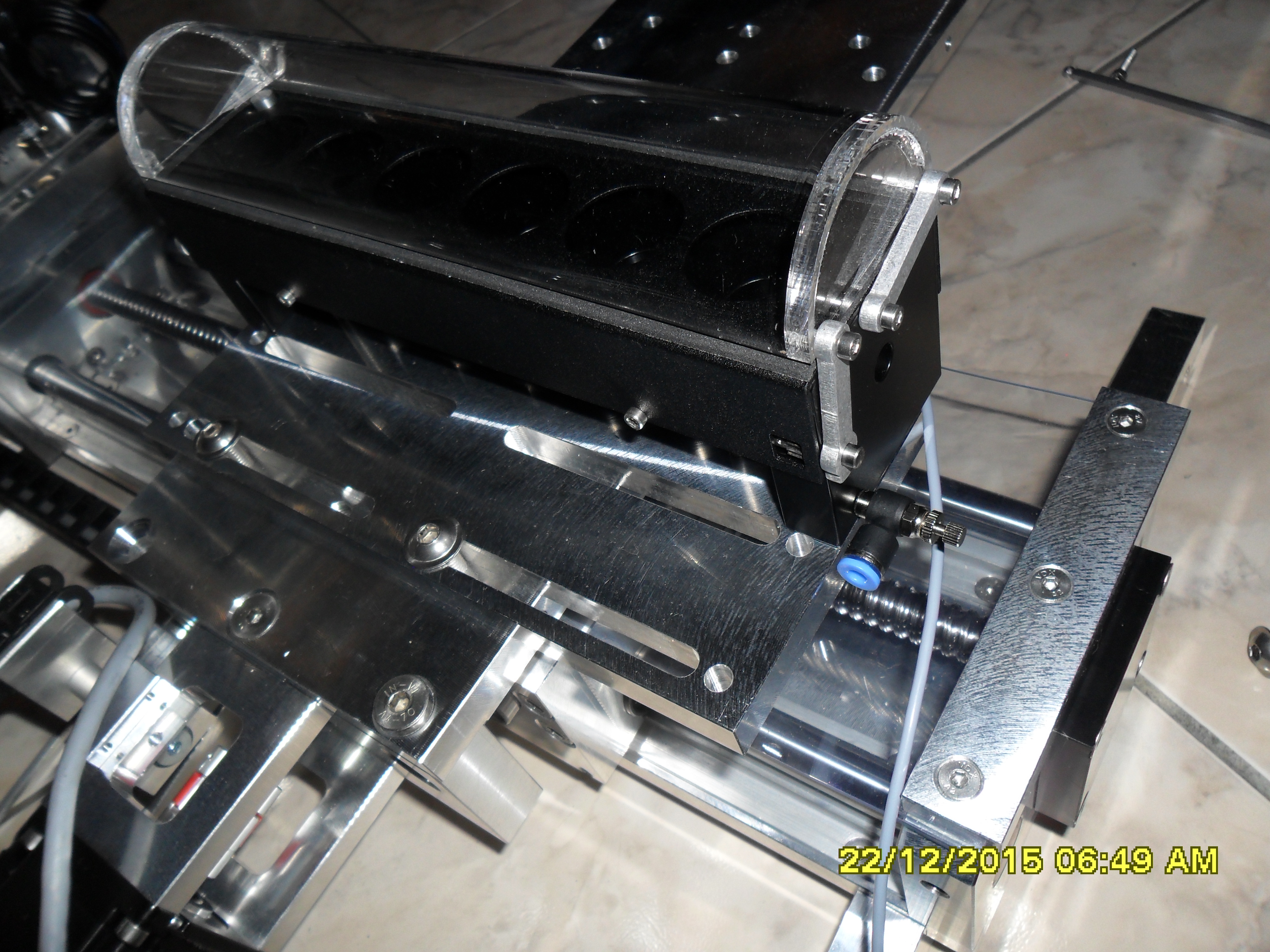
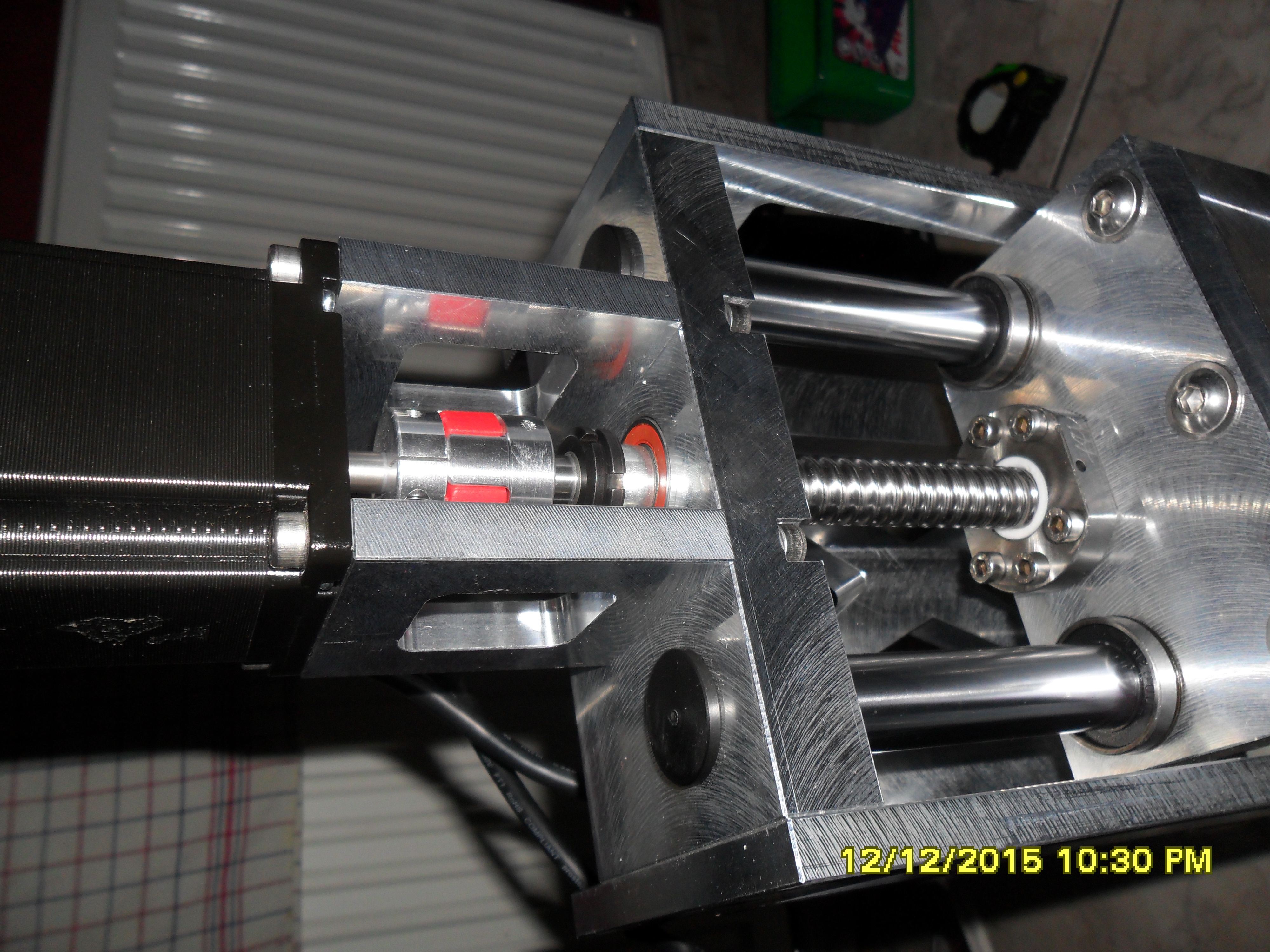
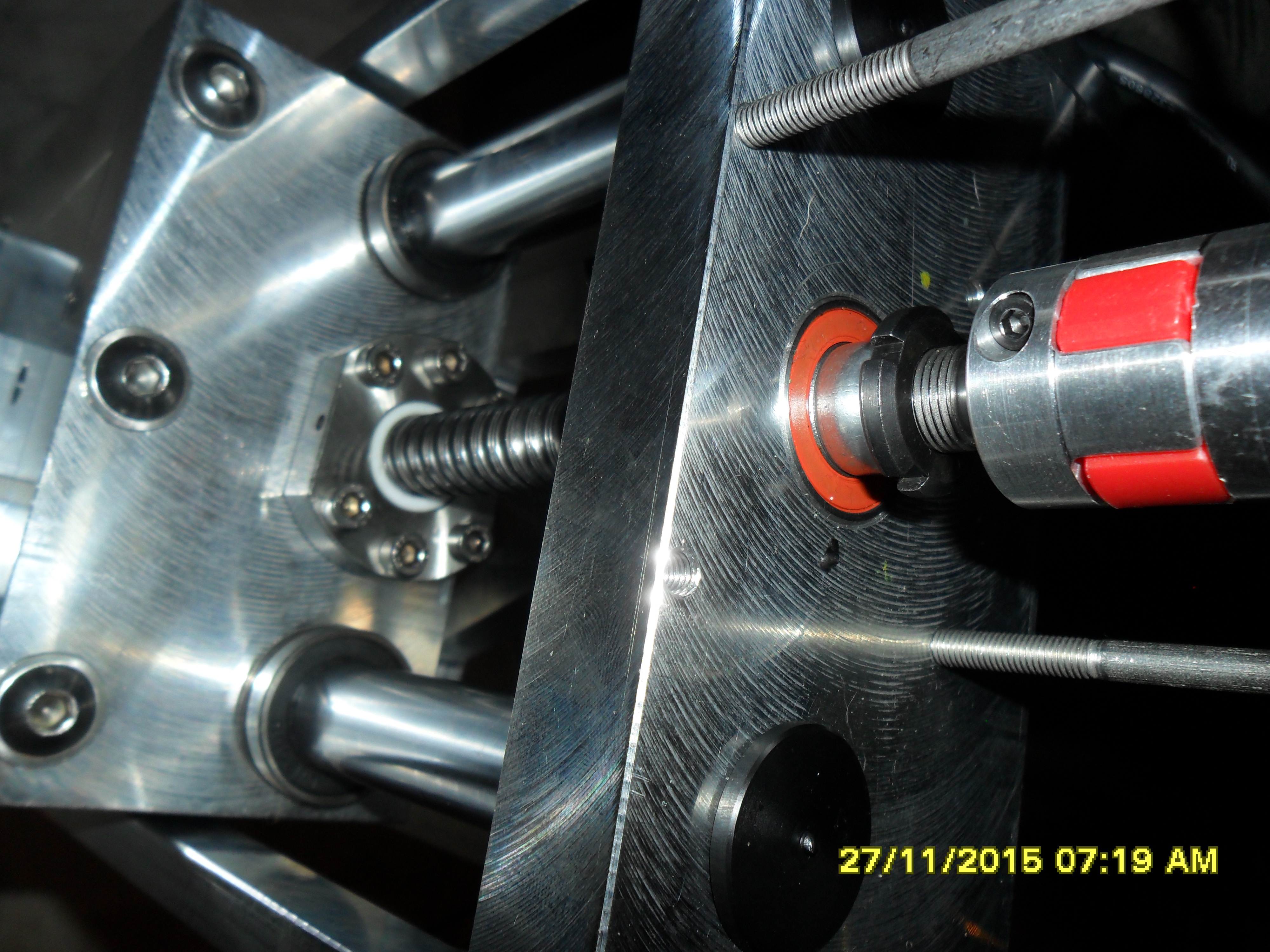
wałki w Y podparte fi 16
reszta wałki fi 20
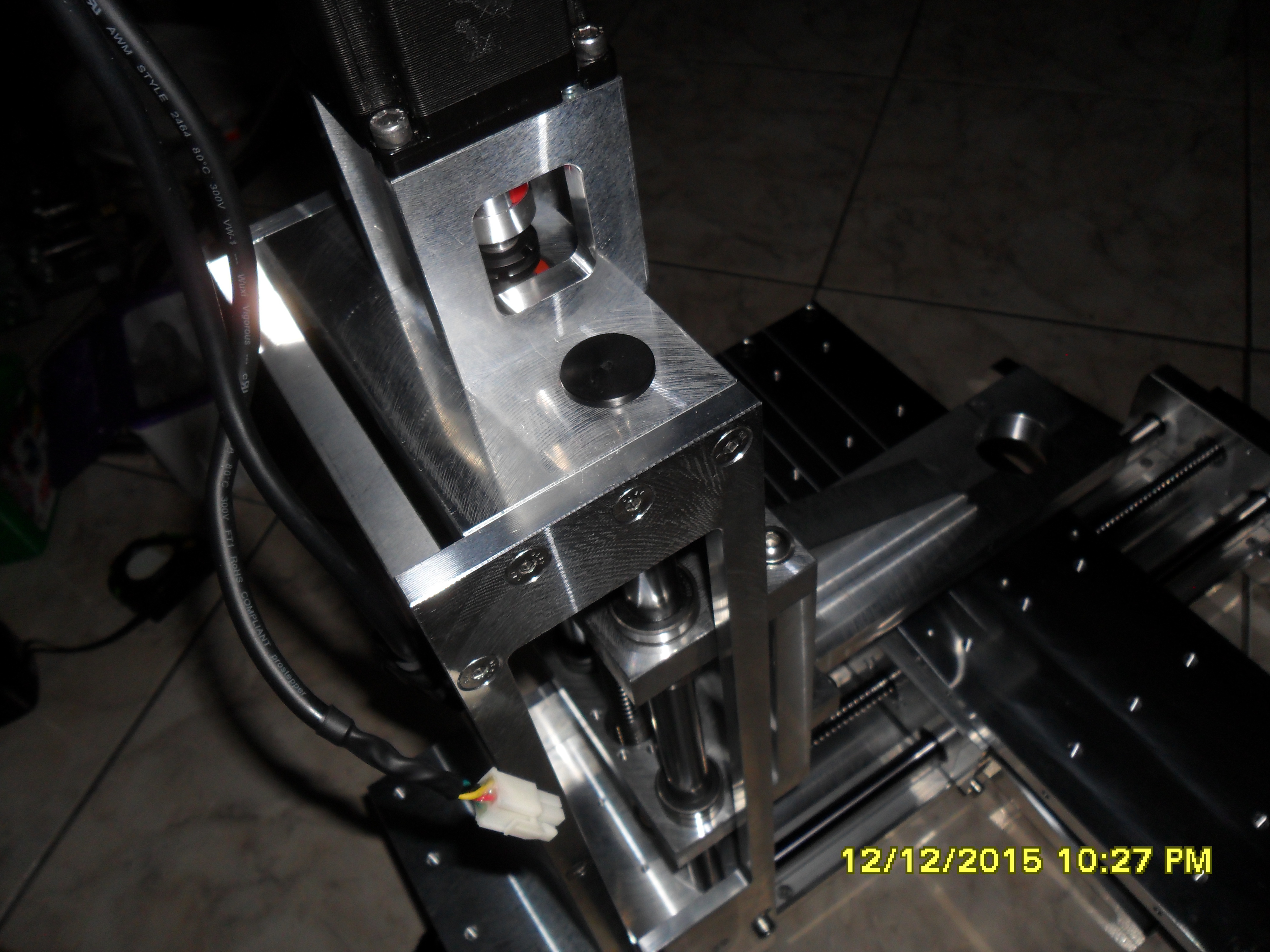
łożyska liniowe na wcisk plus blokowane robaczkiem M5 który nie jest widoczny bo zasłonięty innymi elementami
myślałem nad podpartymi wałkami, ale stwierdziłem że taki ukłąd wystarczy, stół 15 mm grubości, więc jest bardzo sztywny, wymiary stołu 160 x 540 mm
[ Dodano: 2015-12-13, 17:39 ]
adam Fx pisze:Tak bardzo ładnie wykonane urządzenie.
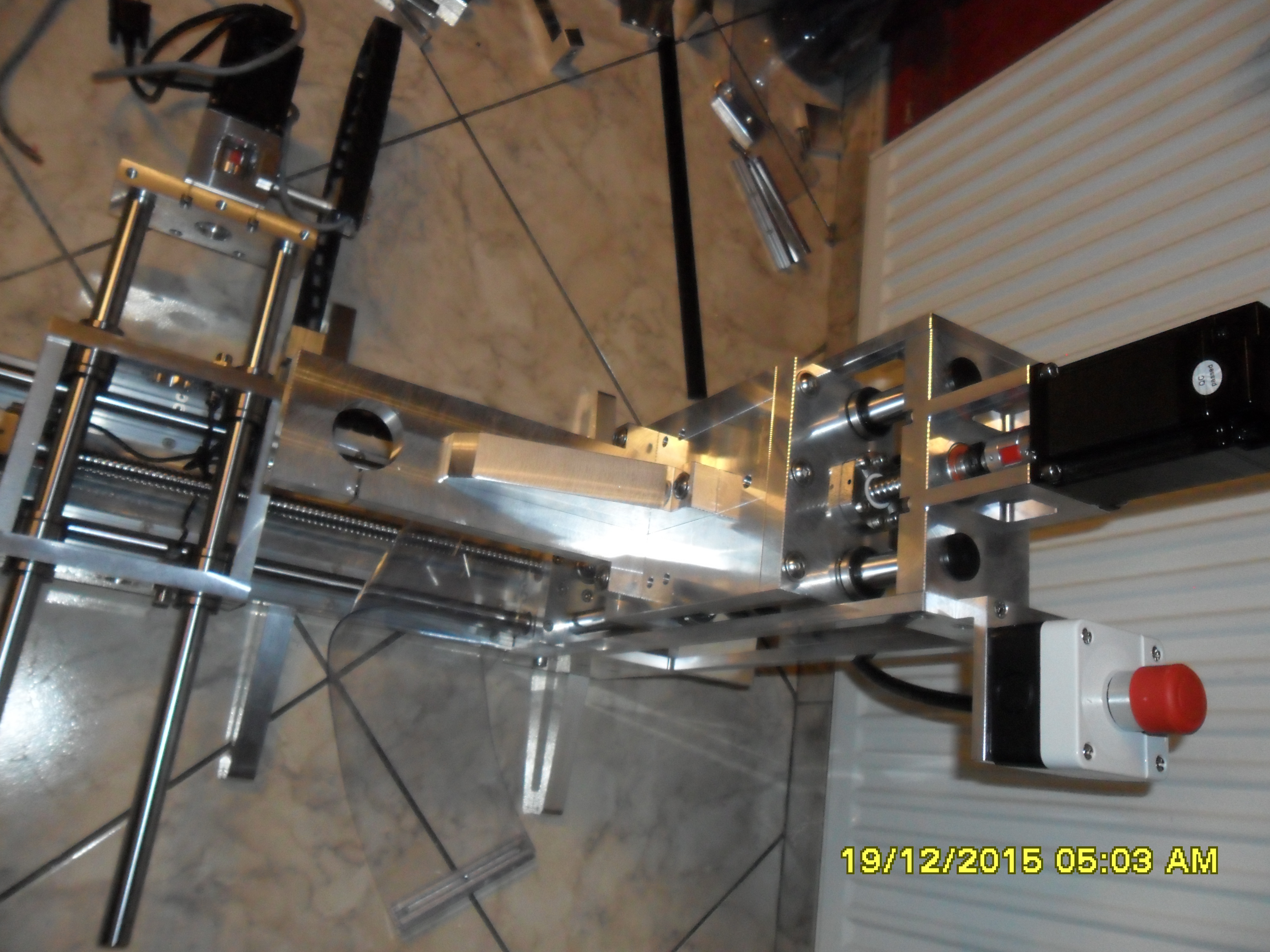
Rzadko na forum się przewijają krokówce z enkoderem. Jak to się steruje ? czy to już sam sterownik realizuje utrzymanie pozycji czy może dochodzi dodatkowa kontrola z programu ? Przy takiej konfiguracji maszyna potrafi być bardzo szybka i właściwiej 3Nm bez enkodera dadzą radę więc jaki jest powód ich zastosowania? Czy pozwolą zwiększyć prędkości a jeśli tak to czy port LPT się wyrobi? a może będzie sterowanie np. przez jakąś kartę. jakim programem ja będziesz poruszał? Mach, linuxCNC...?
silniki z enkoderem, bo dokładniejsze, nie zgubią się przy szybszych dojazdach, kupione na sorotec.de. Tam też kupione sterowanie do tych silników, sterownik ma własny program machopodobny, połączenie z kompem przez usb




")



















")


")