Jarekk,
koncowka mocy IGBT FSBB20CH60 (600VDC); obecny limit to 200V- nastepne wersje bedzie zdaje sie 350V. Obsluga silnikow krokowych jest juz w obecnym firmware, mozna sciagnac z netu.
Leoo,
Bezczujnikowe zgadza sie; po wlaczeniu kreci wirnikiem w lewo i prawo 1/4 obrotu i po sekundzie przalacza sie sie w tryb step/dir. Probowalem zasilanie 170VDC i sygnal Macha z portu drukarki- bez problemu.
Pomijajac oczywiscie fakt wlaczenia takiego zasilania do domowej sieci.
Dlaczego nie 2kW? Nie wiem, przypuszczam dlatego ze konstrukcja jest nowa i autorzy sa konserwatywni. Po pierwsze sprzedaja to bez radiatora- kazdy ma inny motor i trudno sprzedac 5 kilowy radiator komus kto ma 100W motor. Po drugie rating jest jak kazdy widzi i znajac matematyke oraz zasady wyciagniesz swoje 2kW, nie wierze zeby byl problem. A jesli ktos nie zna matematyki i nie umie sobie policzyc to tym bardziej nie powienien myslec o 2kW.
Fakt, jest to nowa niesprawdzona konstrukcja po wyjatkowo niskiej cenie. Jestem pewny ze takich konstrukcji jest mnostwo, nawet w tej cenie, wiec podalem to w ramach ciekawostki. Trudno jest w domowych warunkach obciazyc 1kW motor ale jak bede mial mozliwosc to zdam sprawozdanie.
Dla amatorow porownan napedow podaje tutaj wykaz producenta i dlaczego uwaza on ze przeskoczyl innych w tym polu- znawcow tematu jak Jarekk czy Leoo prosze o opinie i wziecie tego pod lupe, terminologia tu uzyta jest jasna czysta i przejrzysta; gdyby byly jakies luki to latwo je bedzie wylapac, zgadza sie?
(nie tlumacze tekstu bo wiekszosc tutaj doskonale daje sobie rade z angielskim)
QUOTE:
What makes this drive performance so good?
Fluxeon implements fully tunable field oriented flux vector torque control that has become an industry standard in top class AC servo drives. Vector control has been typically available only in much more expensive drives.
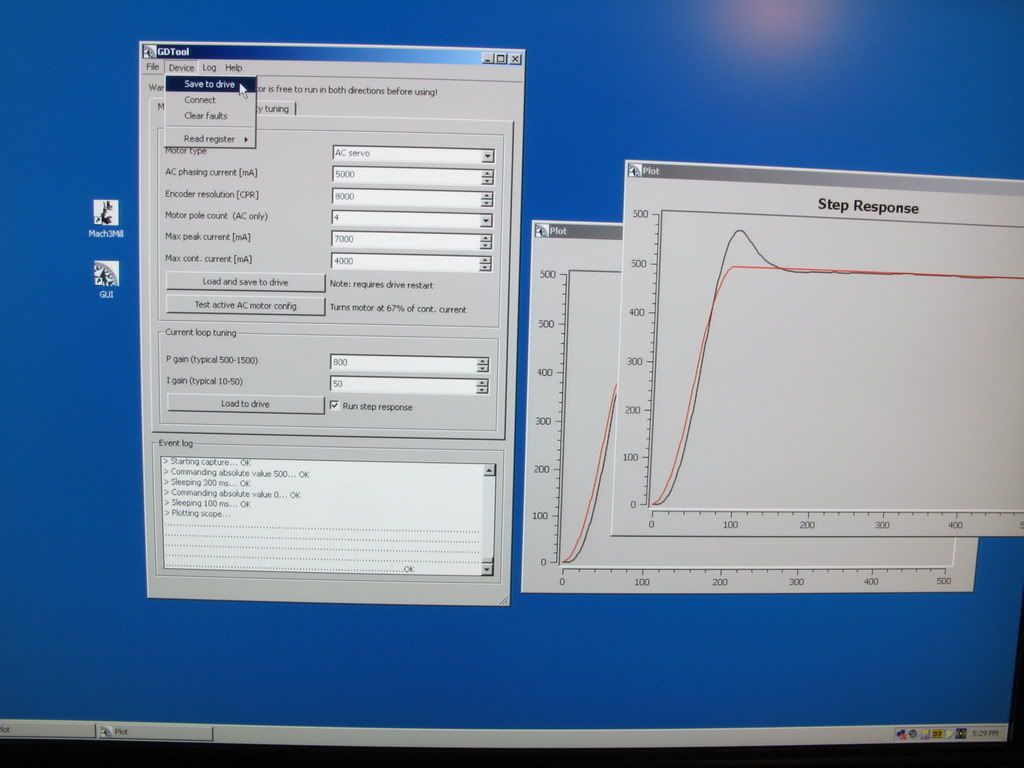
Fluxeon has been built around a high performance 60 MHz digital signal controller with 12 bit AD converter for precise, quiet and maximum troughput control.
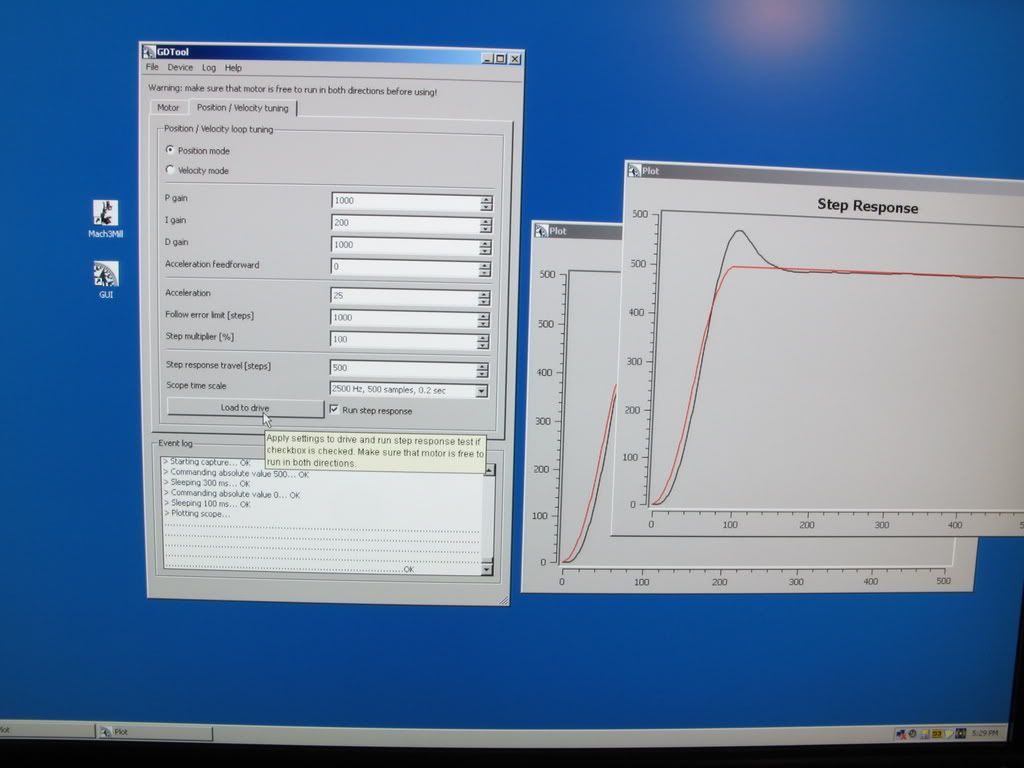
Fluxeon features also tunable acceleration and velocity feedforward paths for quicker response. Feedforward means direct path from commanded position input to motor torque output. In other words, feedforward eliminates the most position error before it even starts forming. A smaller residual position error is being corrected by a standard 32 bit PID feedback loop.
Why torque control is so important?
Torque control is an essential part of servo controls since motor position can be controlled ONLY by adjusting shaft torque. Most (if not all) low cost drives have no closed loop torque control. Instead these drives are based on voltage control which produces sluggish torque response mostly because of the effect of motor winding inductance.
In voltage control mode, the torque bandwidth is typically around 30-80 Hz (derived from motor inductance and resistance). In comparison, a closed loop torque control typically reaches 1500-3000 Hz bandwidth. Higher bandwidth makes it possible to use higher feedback gains to achieve stiffer and more precise position control.
Other key benefits compared to same price competitors
-Firmware (drive's internal software) upgradeable by user
-Easy set-up with guided tuning PC software
-Optional velocity mode for spindle use
-Arbitrary ratio input scaling and gearing (step multiplier/divider)
-High speed optoisolated inputs: up to 330 kHz step rate with standard optoisolator, and up to 2 MHz with socketet replacement
-One drive to rule them all: supports brushed DC, brushless DC and AC servo motors. Upgrade motors without need to replace drives.
http://www.cnczone.com/forums/showpost. ... ostcount=1
_




")



")
")






