IMPULS3 pisze:można by wtedy mieć uniwersalnego suba na wszelkie regulacje kątowe.
Kod to g68 ale jakiś Linux nie za bardzo chce współpracować.
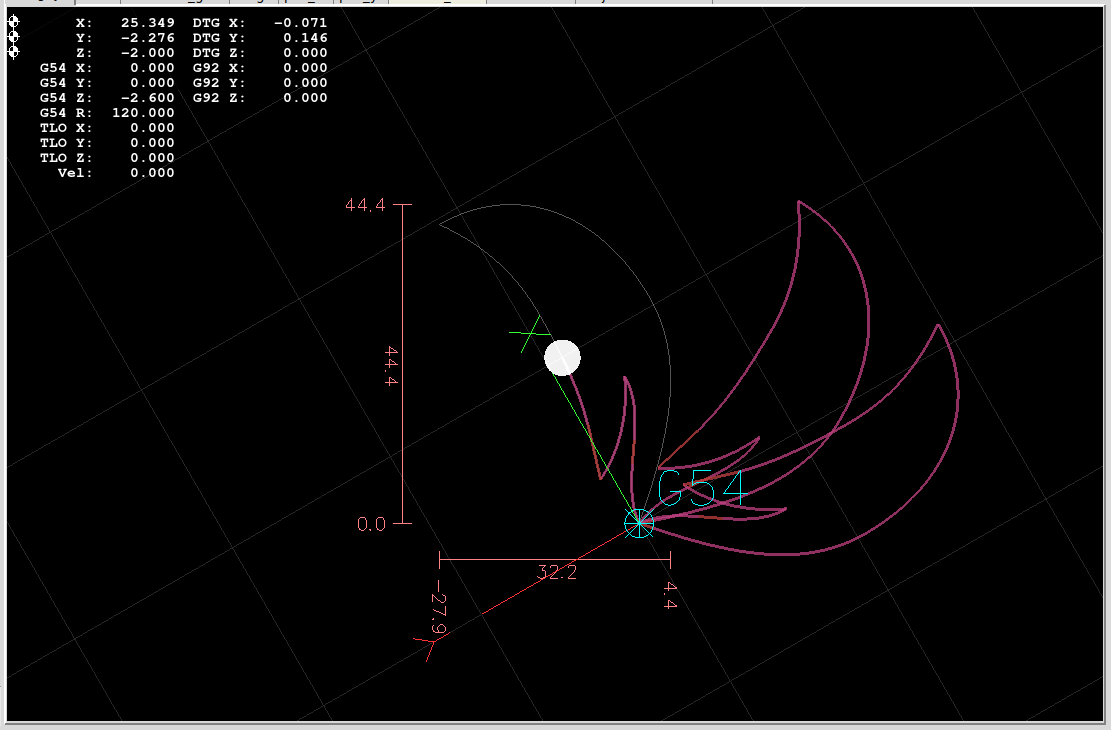
faktycznie wygląda że G68 nie zaimplementowano w LinuxCNC, jedyna możliwość uniwersalnego obrotu w osi Z to G10 L2 . Z ciekawości zrobiłem takiego suba z obrotem (powinien się nadawać jako uniwersalny szablon
Kod: Zaznacz cały
o<szablon_alfa> sub
(szablon testujacy obrot aktualnego ukladu G5x o zadany kat)
#<alfa> = #1 (=0 kat obrotu w stopniach )
(___przykladowe zmienne___)
#<posuw_z> = #2 (=200 posuw w osi Z )
#<posuw> = #3 (=300 posuw w osach X Y )
#<glebokosc> = #4 (=-2 współrzędna Z )
#<s> = #5 (=1 skala )
(___koniec przykladowych zmiennych___)
#<akt_uklad> = #5220
#<obrot_akt_ukladu> = #[5210 + 20 * #<akt_uklad> ]
G10 L2 P0 R#<alfa> (ustawienie obrotu aktualnego układu G5x)
(___przykładowe komendy do obrotu___)
G0 Z5.000
G0 X0.000 Y0.000
G1 Z#<glebokosc> F#<posuw_z>
G5 I[6.825*#<s>] J[-0.590*#<s>] P[-7.017*#<s>] Q[0.00*#<s>] X[18.80*#<s>] Y[-8.500*#<s>] F#<posuw>
G5 I[-5.417*#<s>] J[2.467*#<s>] P[1.883*#<s>] Q[-3.783*#<s>] X[8.00*#<s>] Y[1.60*#<s>] F#<posuw>
G5 I[6.883*#<s>] J[-1.933*#<s>] P[-14.076*#<s>] Q[0.00*#<s>] X[32.40*#<s>] Y[-2.50*#<s>] F#<posuw>
G5 I[6.595*#<s>] J[0.00*#<s>] P[-5.415*#<s>] Q[-3.838*#<s>] X[50.00*#<s>] Y[3.300*#<s>] F#<posuw>
G5 I[0.00*#<s>] J[-12.180*#<s>] P[14.100*#<s>] Q[0.00*#<s>] X[26.500*#<s>] Y[-17.000*#<s>] F#<posuw>
G5 I[-10.560*#<s>] J[0.000*#<s>] P[7.873*#<s>] Q[-9.099*#<s>] X[0.000*#<s>] Y[0.000*#<s>] F#<posuw>
G1 Z0.000 F#<posuw_z>
G0 Z5.000
(___koniec przykładowych komend do obrotu___)
G10 L2 P0 R#<obrot_akt_ukladu> (przywracanie obrotu aktualnego układu G5x )
o<szablon_alfa> endsub