Wasze rady są nieocenione.
radeko pisze:Pierwsze co powinieneś zrobić przy takim dosyć czytelnym komunikacie, to otworzyć sobie plik MILOO_4axis.tcl w jakimś edytorze tekstowym...
Porównałem plik przed i po edycji Post Builder, zauważyłem że następuje przesunięcie lekko o 10 linii (okolice 505 linii), przy zmianie Axis Rotation czy Axis Limits (Deg) wyskakiwał w/w błąd.radeko pisze:Spróbuj wpisać w tej tabeli którą załączyłeś Axis Limit deg MAX 360 MIN -360
Postanowiłem przeszukać plik *.tcl i odnaleźć specyfikacje kinematyczną 4 osi - znalazłem cały opis prościutki do edycji:
####### KINEMATIC VARIABLE DECLARATIONS ##############
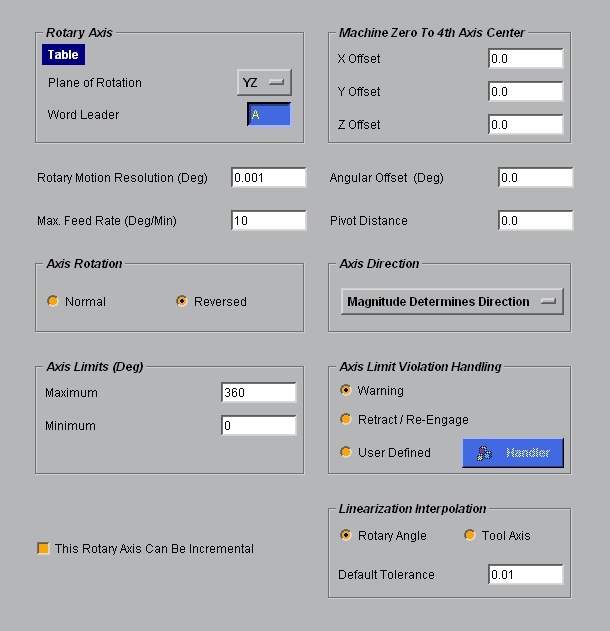
set mom_kin_4th_axis_ang_offset "0.0"
set mom_kin_4th_axis_center_offset(0) "0.0"
set mom_kin_4th_axis_center_offset(1) "0.0"
set mom_kin_4th_axis_center_offset(2) "0.0"
set mom_kin_4th_axis_direction "MAGNITUDE_DETERMINES_DIRECTION"
set mom_kin_4th_axis_incr_switch "OFF"
set mom_kin_4th_axis_leader "A"
set mom_kin_4th_axis_limit_action "Warning"
set mom_kin_4th_axis_max_limit "360"
set mom_kin_4th_axis_min_incr "0.001"
set mom_kin_4th_axis_min_limit "-360" (zamiast "0" wpisałem "-360")
set mom_kin_4th_axis_plane "YZ"
set mom_kin_4th_axis_point(0) "0.0"
set mom_kin_4th_axis_point(1) "0.0"
set mom_kin_4th_axis_point(2) "0.0"
set mom_kin_4th_axis_rotation "standard" (zamiast reversed wpisałem standard)
NX wygenerował kod który idealnie lata po wzorcu bez żadnych dzikich obrotów.
Mogę wreszcie odhaczyć kolejny sukces i brać się za następne zadanie.
radeko bardzo dziękuje za naprowadzenie, tak to jest jak się człowiek czegoś uczepi to nie widzi innego rozwiązania, punkt dla ciebie
Pozdrawiam
Paweł