Sami zrobicie bo już blisko.MAAK pisze:Kto w końcu to zrobi co nas interesuje
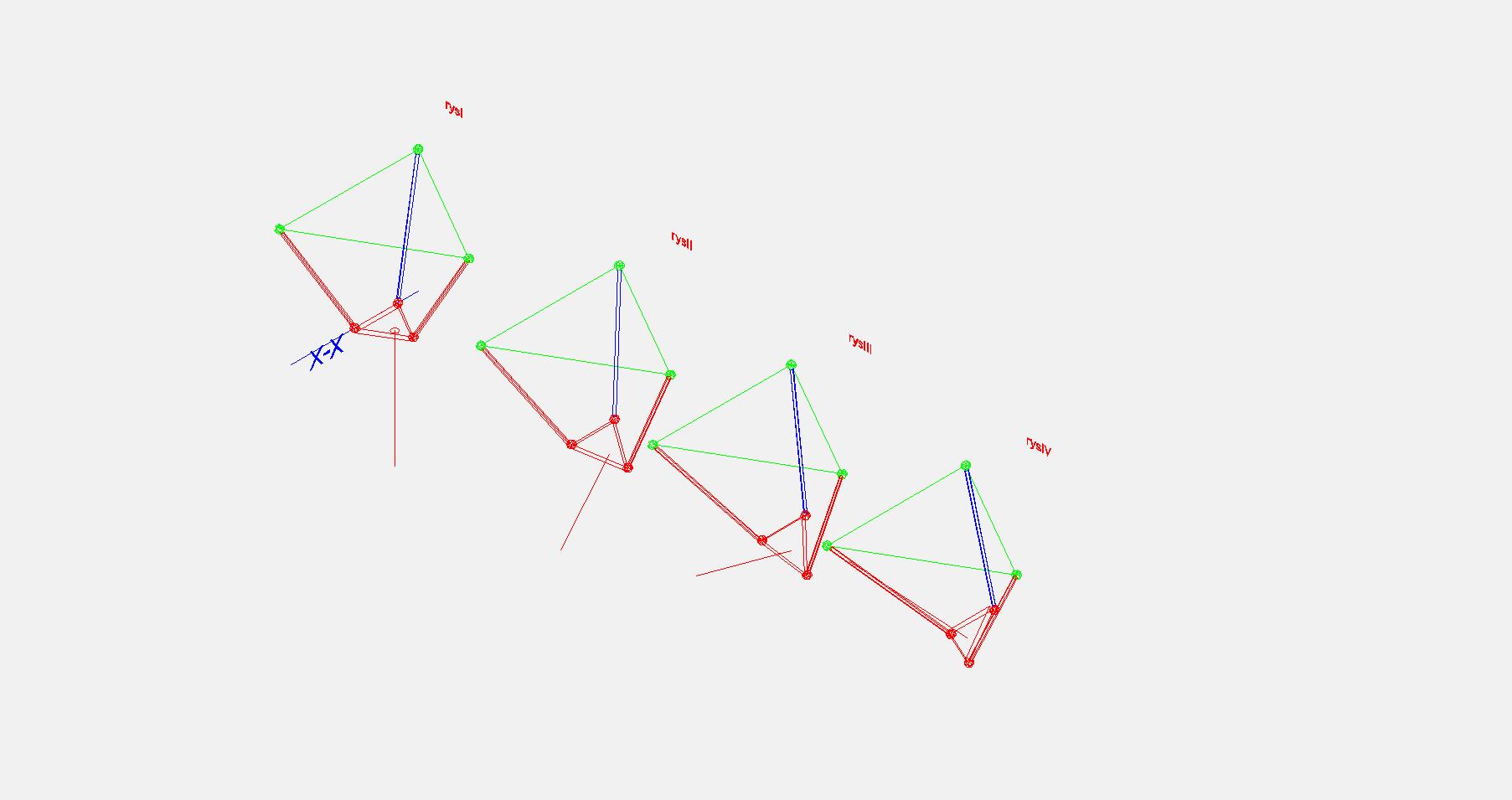
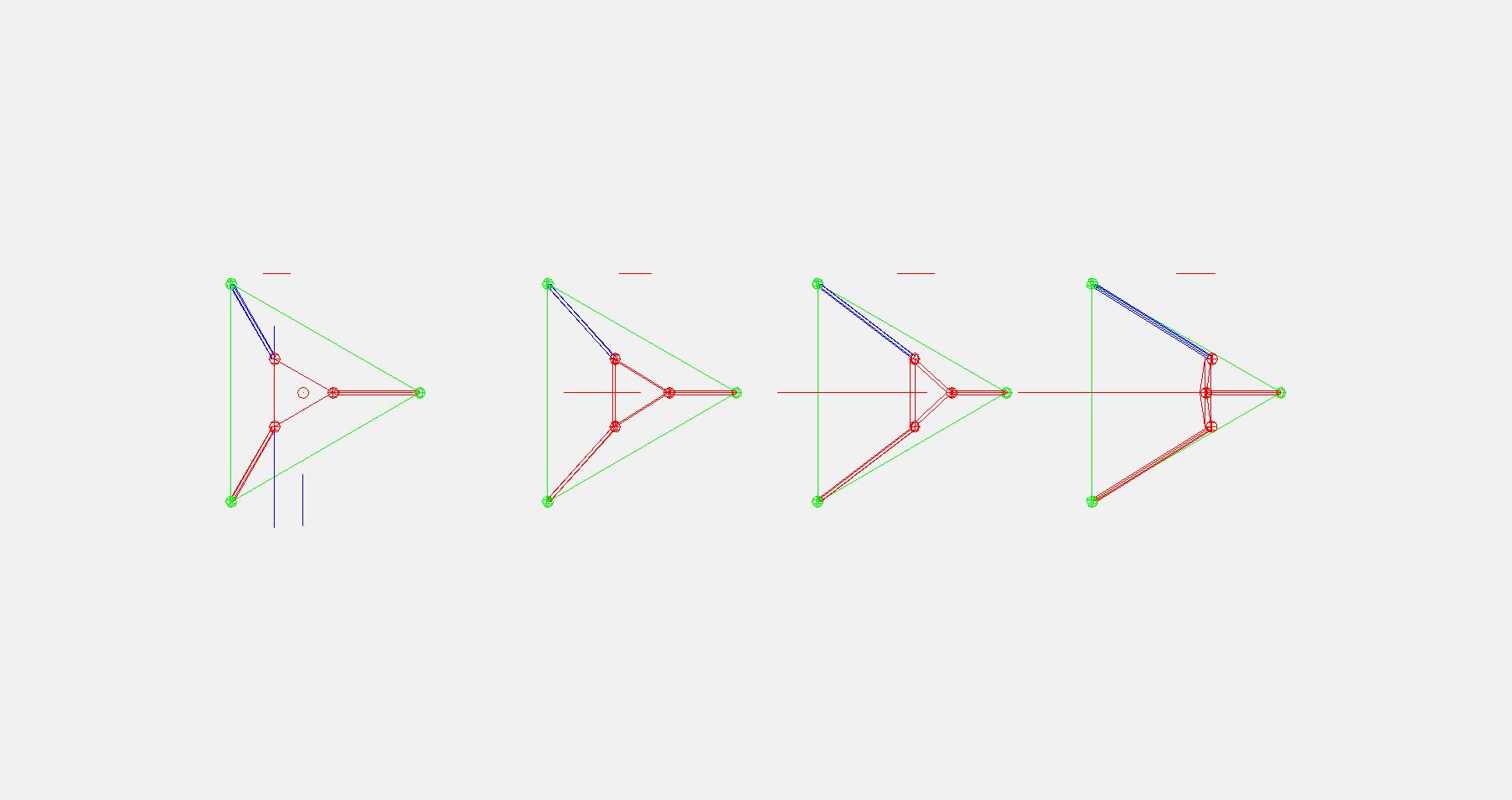
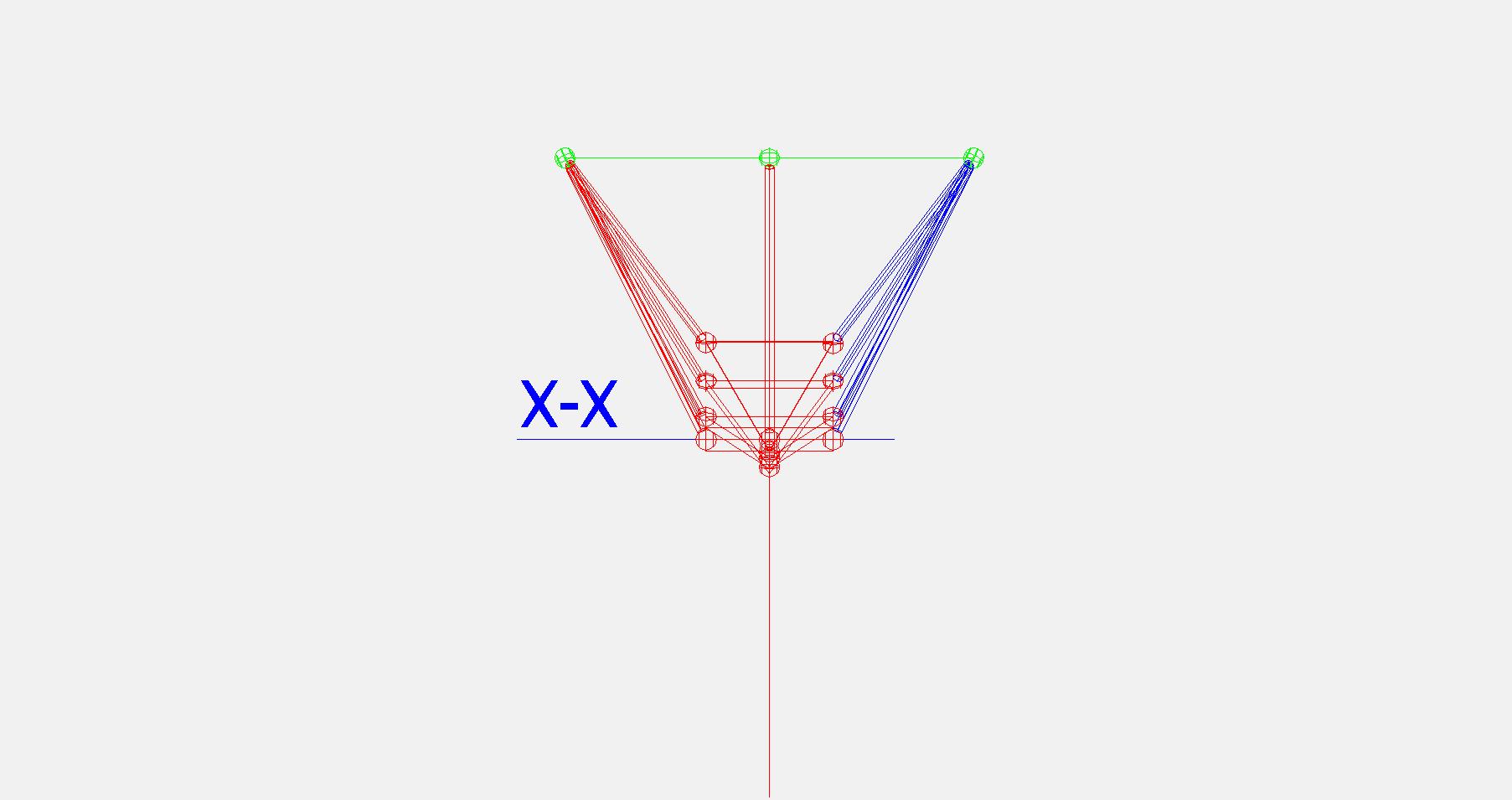
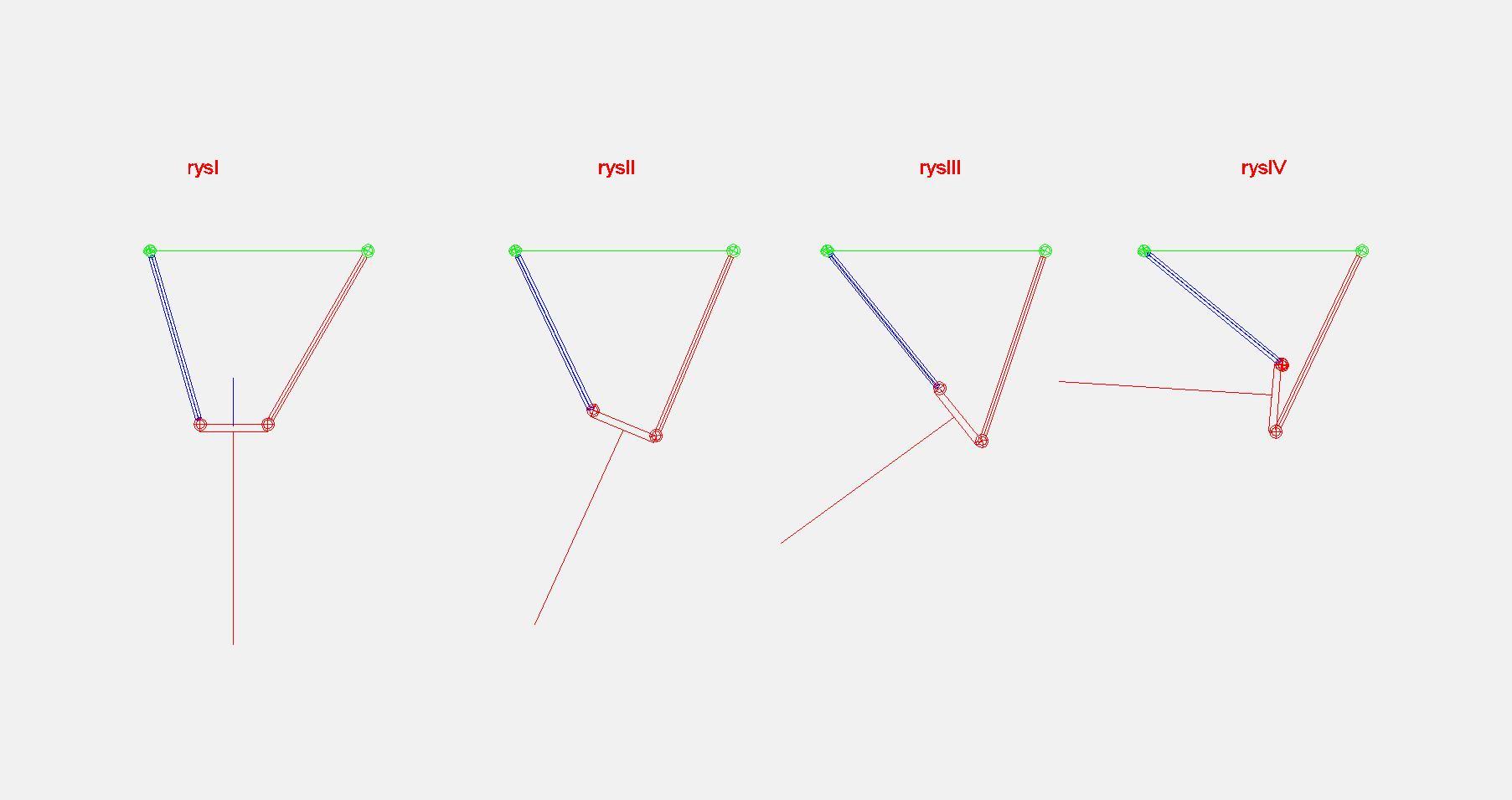
Kol ezbig ułożył równania i jeździ w animacji platformą.
Czy może kolega dołożyć przycisk ruchu skośnego - jednocześnie np x+ay. Jeżeli tak to w machu zamiast posługiwać się przyciskami w pracy recznej wyedytują koledzy przyciski uruchamiające makro które wykona skok w danej osi. I podobnie jak Mach w osiach XYZ może wykonywać skoki to makro w oparciu o DRO Macha policzy ile ma ruszyć kazdą z osi i wpisze do wykonania odpowiednie wartości. Niestety konwerter zewnętrzy do Gkodu nadal wydaje mi się konieczny ale akurat to nie jest problem.
Bo jak na razie to tylko w przyciskach pracy ręcznej widać problem.
( wcześniejsze marudzenie o trudnościach matematycznych z opisem pozycji wrzeciona wycofuję
A mechanikę teleskopowego ramienia ze stosunkowo dużą sztywnością można zrobić w oparciu o wałek wielowypustowy i zamek na łożyskach ( zamiast tuleji ) Trwałość nie będzie rewelacyjna ale z pewnoscią do frezowania w styrodurze wystarczy.
Potencjalny sponsor nawet tu na forum może się znajdzie? 5osi z zasięgiem 3m3 kubatury jest już atrakcyjne.
[ Dodano: 2011-01-11, 20:27 ]
Choć właściwie to szkoda czasu na bzdurne wynalazki - prowadnica prostokatna 20 z wózkiem ma wystarczajacy moment aby utrzymać kardany. Wiec żadnych wielowypustów.