Witam,
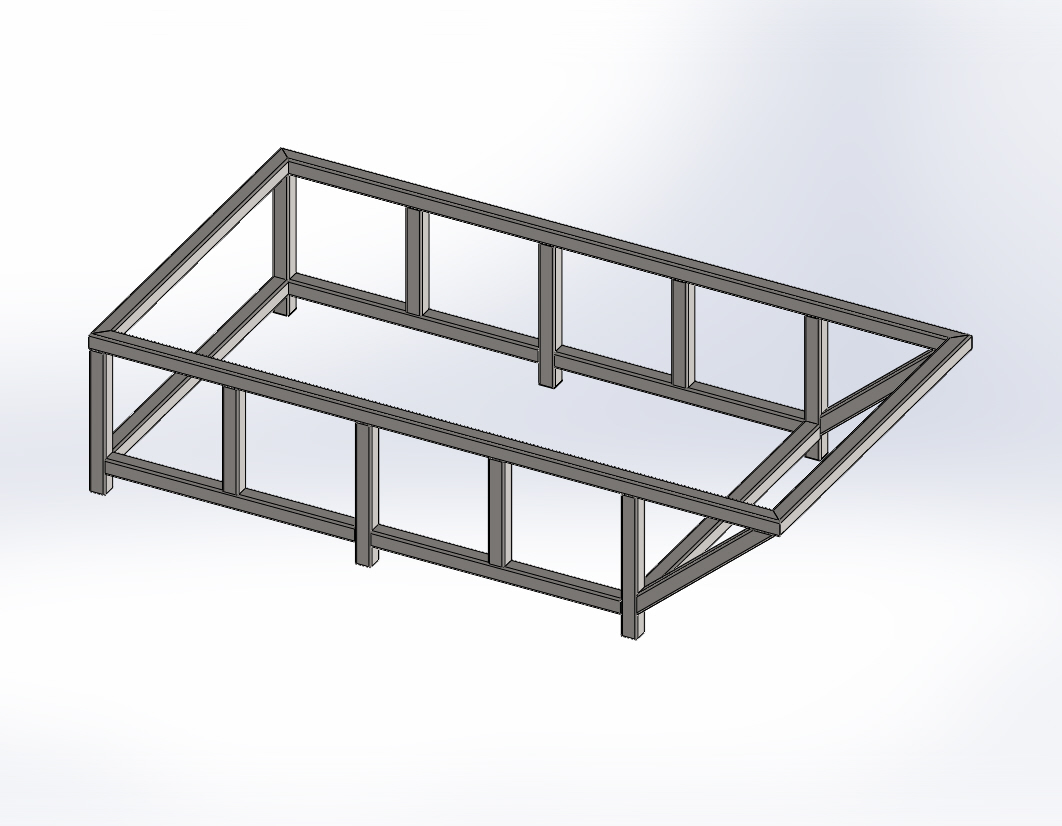
decyzja podjęta - budujemy. Co z tego wyjdzie zobaczymy.
Dokładność rzędu 0,2mm jest wystarczająca.
Pierwszym problemem jest sposób rozwiązania systemu przesuwu liniowego. Podoba mi się rozwiązanie kolanorękiego, ale nie jestem pewien co zastosować:
-wałek liniowy z łożyskiem w obudowie SME
-prowadnice szynowe HGR z wózkiem HGW.
Chciałbym, aby system przesuwu był zintegrowany ze stołem. Stół wodny w celu zminimalizowania zadymienia i zapylenia.
Poniżej jest jedno z rozwiązań, które mi się podoba. Problemem jest utrzymanie czystośći na prowadnicach.

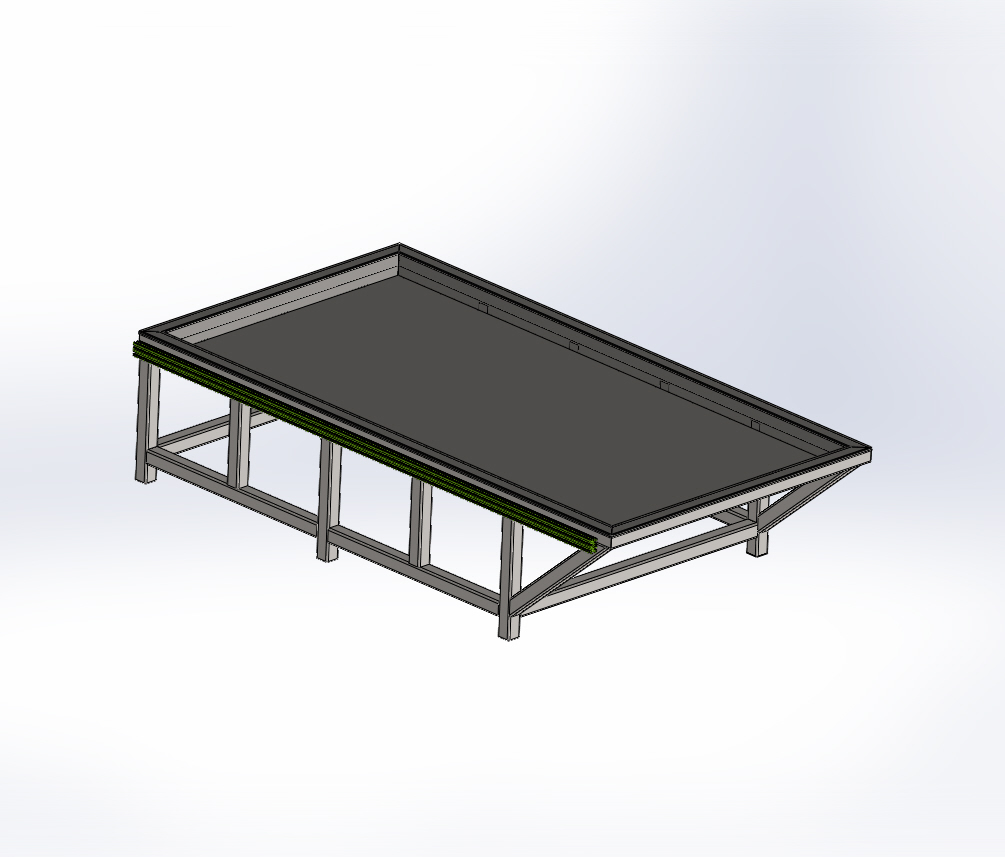
To rozwiązanie jest już chyba trochę lepsze jeśli chodzi o możliwość uszkodzenia i czystość prowadnic:

Czy silnik krokowy jako napęd bramy można montować w dowolnej pozycji czy raczej montuje się je w poziomie?
Proszę o komentarze i rzeczową dyskusję.
Pozdrawiam
Olenek
[ Dodano: 2013-05-04, 13:09 ]
Czy są listwy zębate, które maja otwory montażowe z boku a nie od spodu? W znaczący sposób ułatwiłoby to montaż na belce.
Dzisiaj wieczorem postaram sie podesłać jakąś koncepcje przesuwu bramy.
1 sinik ok 5Nm do przesuwu po jednej stronie wystarczy. W jaki sposób można uniknąć skoszenia bramy? Czy to już same prowadnice liniowe eliminują?
Czy lepiej żeby silnik bezpośrednio miał zębatke na osi, która będzie poruszać sie po listwie zębatej czy zrobić jakieś przełożenie?
Pozdrawiam
Olenek
[ Dodano: 2013-05-04, 21:05 ]
Witam,
zamieszczam rozwiązanie, które na szybko narysowałem. Rozwiązanie ma racje bytu pod warunkiem możliwości montażu listwy zębatej bokiem. Jeśli nie to przesunę listwę zębatą pod profil.
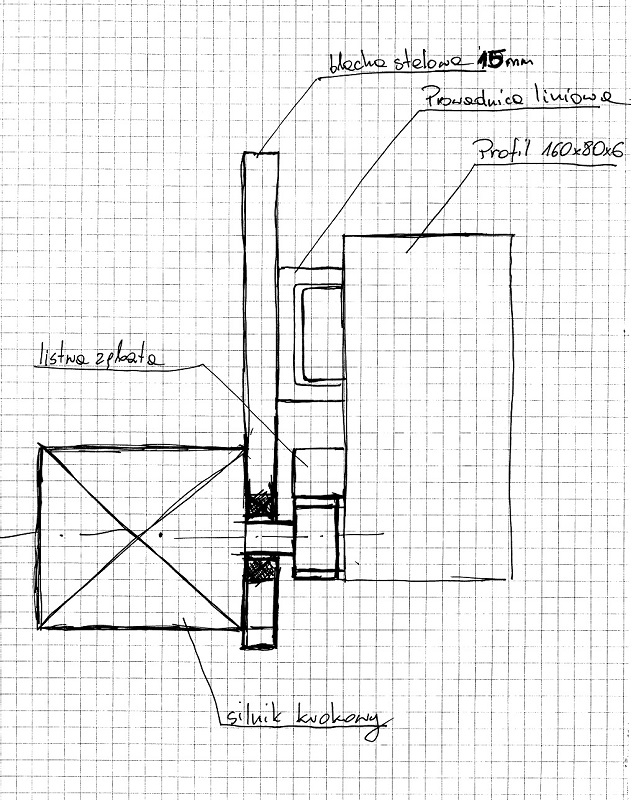
Czy nie powinno być przełożenia pomiędzy silnikiem krokowym a zębatką poruszającą się po listwie?
Czy profil 160x80x6 przy polu roboczym plazmy nie będzie za mały/duży?
Pozdrawiam
Olenek