mc2kwacz pisze:1. czy zanim napisałeś kolejny post, użyłeś wyszukiwarki ze słowami kluczowymi NA PRZYKŁAD: "microcontroller features quadrature encoder debugger" albo "hadware debugger programmer low cost"?
Google pisze:Nie znaleziono żadnych wyników wyszukiwania dla hasła "microcontroller features quadrature encoder debugger".
Bez cudzysłowu padają zasadniczo wyniki ze słowami ARM-Cortex.
32-bitowy procesor do liczenia enkodera to stanowcza przesada.
Natomiast jeśli chodzi o duet AT89C2051 + 74HCT86, to sprawa jest prostsza niż myślisz, po prostu przerwanie ma być wywołane na
każdym zboczu
każdego sygnału.
Standardowo układy przerwań w mikrokontrolerach są inaczej budowane, zresztą może jakiś procek ma taką możliwość, ale ja akurat nie znam jego architektury i asemblera, a 74HCT86 to układ popularny i tani.
Co do twoich trollowskich wrzasków, to też nie masz racji.
Układ 8051 nie wszedł masowo na rynek piętnaście lat temu, ten układ ma ponad trzydzieści wiosen, konkretnie jego premiera to rok 1980.
I nic nie zapowiada jego śmierci, bo po prostu jest dobry i tani.
Układ z tej rodziny DS89C400 wyciąga ponad trzydzieści mipsów i ma 64 kB flasha.
Więc jest w czym wybierać.
Ja nikogo nie zamierzam przekonywać do tych układów, nawet myślę że jak ktoś ma zaczynać naukę od zera, to powinien jednak wybrać coś nowszego i ambitniejszego.
Ale twoje wrzaski że '51 to średniowiecze, po pierwsze mają się nijak do rzeczywistości, a po drugie są poniżej krytyki.
W celach edukacyjnych polecam Ci wycieczkę na najbliższą budowę.
Znajdź tam murarzy i powiedz im że młotek i siekiera to narzędzia z epoki kamienia łupanego (i to wcale nie w przenośni), a oni są debilami jeśli ich używają w XXI wieku.
To by było na tyle.
-------------------------------
pioterek pisze:Jeżeli chodzi o temat "metody kwadraturowej (poszukaj w sieci co o jest)" to wymaga to dodatkowągo, źródła impulsów a sygnały nie są dostosowane do 40110.
Analiza przebiegu kwadraturowego jest bardzo prosta.
To są dwa przebiegi przesunięte w fazie o 90°.
Bierzesz jeden z tych przebiegów i przy wystąpieniu dowolnego zbocza sprawdzasz stan drugiego przebiegu.
Załóżmy że kręci się w lewo, na zboczach rosnących jest zawsze stan wysoki na drugim przebiegu, a na zboczach opadających stan niski.
Jeśli teraz zacznie się kręcić w drugą stronę, to sytuacja się odwróci i na zboczach rosnących jest zawsze stan niski na drugim przebiegu, a na zboczach opadających stan wysoki.
To jest proste, tu masz fajny rysunek z elektrody.pl :
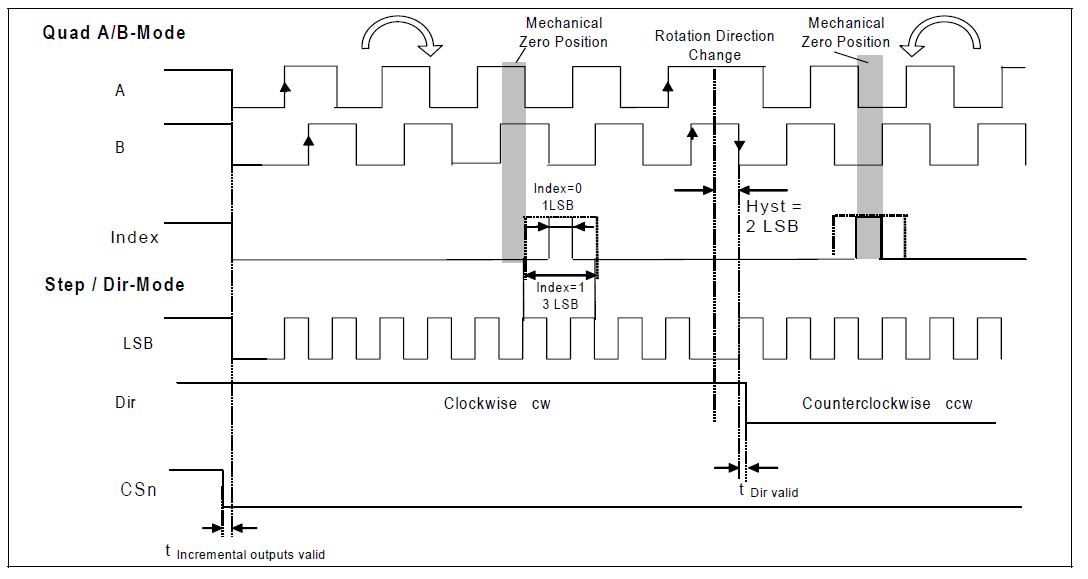
Tylko tyle że łatwiej napisać program na mikrokontroler niż złożyć odpowiedni układ z bramek logicznych.
.










