Dodane 30 minuty 13 sekundy:
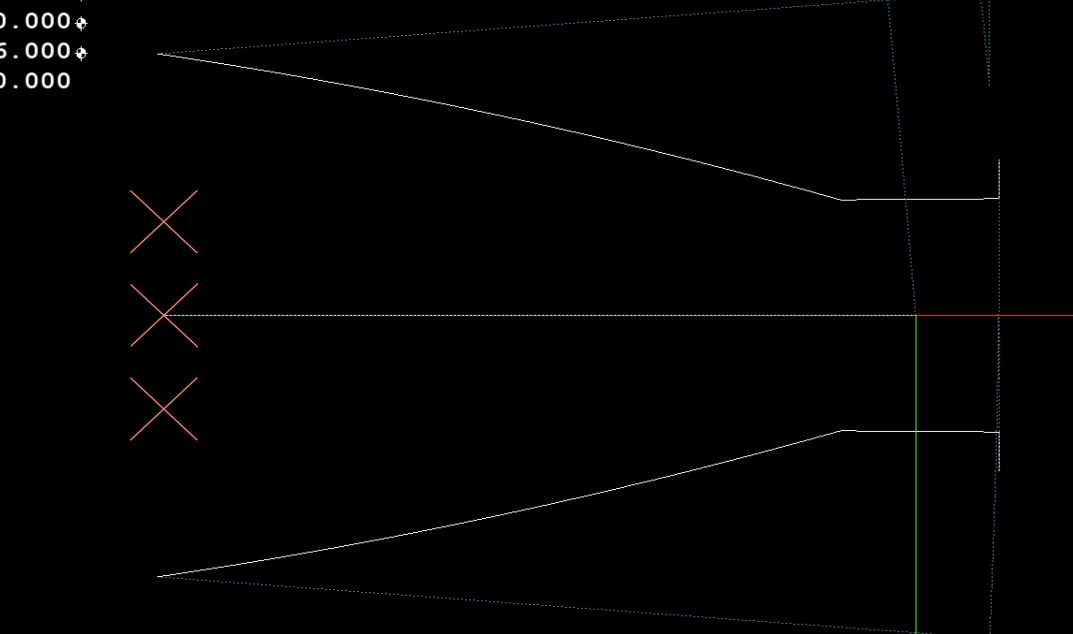
No właśnie. A mnie obrót koła przy rozjeźdzaniu to robił. Tylko podawany na oko, AI pewnie go wyliczy w zależności od długości zęba.
Już mu wrzucam.
Dodane 56 minuty 54 sekundy:
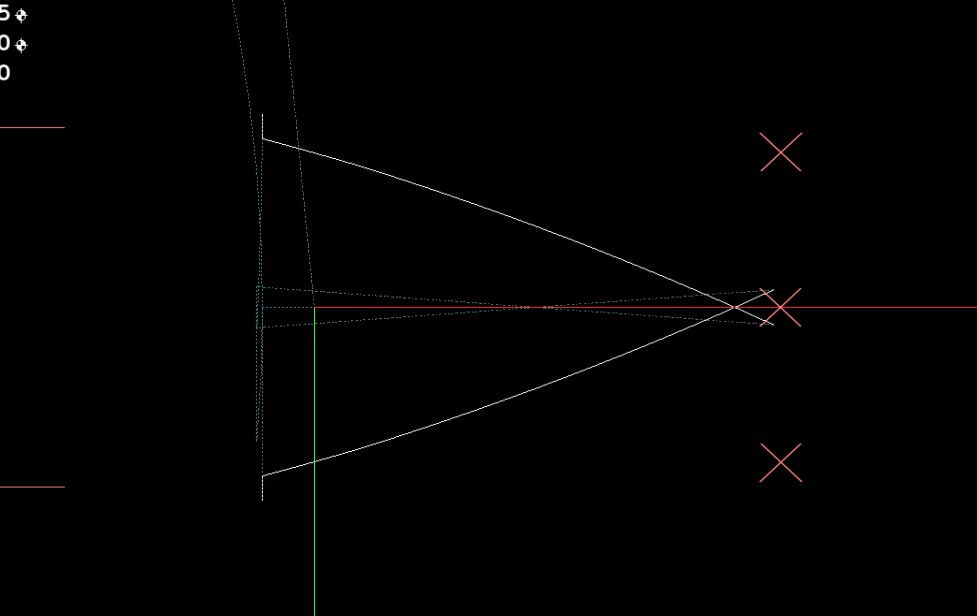
No nie pomógł
Obsługa, Programowanie i Budowa Maszyn Numerycznych




Wróć do „Modernizacja dłutownicy DAA 16”
No właśnie. A mnie obrót koła przy rozjeźdzaniu to robił. Tylko podawany na oko, AI pewnie go wyliczy w zależności od długości zęba.
A kolega wie, co to jest programowe kasowanie luzu nawrotnego ?
I na razie nie zobaczysz