



To jest mój plik ini
# Generated by stepconf 1.1 at Sun Feb 9 16:54:21 2020
# Jeśli zmodyfikujesz ten plik zmainy zostaną
# nadpisane gdy uruchomisz ponownie Stepconf
[EMC]
MACHINE = huanyang
DEBUG = 0
VERSION = 1.1
[DISPLAY]
DISPLAY = axis
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MIN_FEED_OVERRIDE = 0.000000
MAX_FEED_OVERRIDE = 1.200000
MAX_SPINDLE_OVERRIDE = 1.5
MIN_SPINDLE_OVERRIDE = 0.1
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 5
PROGRAM_PREFIX = /home/cnc/linuxcnc/nc_files
INCREMENTS = 5mm 1mm .5mm .1mm .05mm .01mm .005mm
POSITION_FEEDBACK = ACTUAL
DEFAULT_LINEAR_VELOCITY = 6.000000
MAX_LINEAR_VELOCITY = 83.3333
MIN_LINEAR_VELOCITY = 0.500000
DEFAULT_ANGULAR_VELOCITY = 12.000000
MAX_ANGULAR_VELOCITY = 180.000000
MIN_ANGULAR_VELOCITY = 1.666667
EDITOR = gedit
GEOMETRY = xyz
PYVCP = custompanel.xml
TKPKG = Ngcgui 1.0
NGCGUI_FONT = Helvetica -12 normal
NGCGUI_PREAMBLE = mm_std.ngc
NGCGUI_SUBFILE = kanalek.ngc
NGCGUI_SUBFILE = kanalek_y.ngc
NGCGUI_SUBFILE = otwor.ngc
NGCGUI_SUBFILE = otwory_po_okregu.ngc
NGCGUI_SUBFILE = przejazd.ngc
NGCGUI_SUBFILE = kieszen.ngc
NGCGUI_SUBFILE = frezowanie_po_obwodzie.ngc
NGCGUI_SUBFILE = otwory_linia.ngc
NGCGUI_SUBFILE = luk.ngc
NGCGUI_SUBFILE = powierzchnia.ngc
NGCGUI_SUBFILE =
[KINS]
JOINTS = 3
KINEMATICS = trivkins coordinates=XYZ
[FILTER]
PROGRAM_EXTENSION = .png,.gif,.jpg Greyscale Depth Image
PROGRAM_EXTENSION = .py Python Script
PROGRAM_EXTENSION = .nc,.tap G-Code File
png = image-to-gcode
gif = image-to-gcode
jpg = image-to-gcode
py = python
[TASK]
TASK = milltask
CYCLE_TIME = 0.010
[RS274NGC]
PARAMETER_FILE = linuxcnc.var
SUBROUTINE_PATH = ../../nc_files/ngcgui_lib:../../ngcgui_lib/utilitysubs:/home/j/linuxcnc/nc_files/ngcgui
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
BASE_PERIOD = 39062
SERVO_PERIOD = 1000000
[HAL]
HALUI = halui
HALFILE = huanyang.hal
HALFILE = custom.hal
HALFILE = xhc-whb04b-6.hal
POSTGUI_HALFILE = custom_postgui.hal
[HALUI]
MDI_COMMAND=(debug,00)
MDI_COMMAND=(debug,macro1)
MDI_COMMAND=(debug,macro2)
MDI_COMMAND=(debug,macro3)
MDI_COMMAND=(debug,macro4)
MDI_COMMAND=G1 G53 X0 Y0 Z0 F4000
MDI_COMMAND=(debug,macro6)
MDI_COMMAND=G1 X0 Y0 Z0 F4000
MDI_COMMAND=(debug,macro8)
MDI_COMMAND=(debug,macro9)
MDI_COMMAND=(debug,macro10)
MDI_COMMAND=(debug,macro11)
MDI_COMMAND=(debug,macro12)
MDI_COMMAND=(debug,macro13)
MDI_COMMAND=(debug,macro14)
MDI_COMMAND=(debug,macro15)
MDI_COMMAND=(debug,macro16)
MDI_COMMAND=G1 G53 Z0 F4000
MDI_COMMAND=(debug,macro17)
MDI_COMMAND=(debug,macro18)
MDI_COMMAND=(debug,macro19)
[TRAJ]
COORDINATES = X Y Z
LINEAR_UNITS = mm
ANGULAR_UNITS = degree
DEFAULT_LINEAR_VELOCITY = 8.00
MAX_LINEAR_VELOCITY = 80.00
[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = tool.tbl
[AXIS_X]
MAX_VELOCITY = 76.0009728125
MAX_ACCELERATION = 500.0
MIN_LIMIT = -0.001
MAX_LIMIT = 430.0
[JOINT_0]
TYPE = LINEAR
HOME = 0.0
MIN_LIMIT = -0.001
MAX_LIMIT = 430.0
MAX_VELOCITY = 76.0009728125
MAX_ACCELERATION = 500.0
STEPGEN_MAXACCEL = 625.0
SCALE = 320.0
FERROR = 1
MIN_FERROR = .25
HOME_OFFSET = 0.000000
HOME_SEARCH_VEL = -1.500000
HOME_LATCH_VEL = -1.500000
HOME_OFFSET = 0.0
HOME_SEQUENCE = 1
[AXIS_Y]
MAX_VELOCITY = 76.0009728125
MAX_ACCELERATION = 500.0
MIN_LIMIT = -0.001
MAX_LIMIT = 510.0
[JOINT_1]
TYPE = LINEAR
HOME = 0.0
MIN_LIMIT = -0.001
MAX_LIMIT = 510
MAX_VELOCITY = 76.0009728125
MAX_ACCELERATION = 500.0
STEPGEN_MAXACCEL = 625.0
SCALE = 320.0
FERROR = 1
MIN_FERROR = .25
HOME_OFFSET = 0.000000
HOME_SEARCH_VEL = -1.500000
HOME_LATCH_VEL = -1.500000
HOME_OFFSET = 0.0
HOME_SEQUENCE = 2
[AXIS_Z]
MAX_VELOCITY = 60.0
MAX_ACCELERATION = 500.0
MIN_LIMIT = -170.0
MAX_LIMIT = 0.001
[JOINT_2]
TYPE = LINEAR
HOME = 0.0
MIN_LIMIT = -170.0
MAX_LIMIT = 0.001
MAX_VELOCITY = 60.0
MAX_ACCELERATION = 500.0
STEPGEN_MAXACCEL = 625.0
SCALE = 320.0
FERROR = 1
MIN_FERROR = .25
HOME_OFFSET = 0.000000
HOME_SEARCH_VEL = 1.500000
HOME_LATCH_VEL = 1.500000
HOME_OFFSET = 0.0
HOME_SEQUENCE = 0
Znaleziono 3 wyniki
Wróć do „Po zamianie silników i sterowników serwo problem.”
- 15 lis 2022, 11:08
- Forum: CNC podstawy
- Temat: Po zamianie silników i sterowników serwo problem.
- Odpowiedzi: 7
- Odsłony: 1291
- 11 lis 2022, 19:23
- Forum: CNC podstawy
- Temat: Po zamianie silników i sterowników serwo problem.
- Odpowiedzi: 7
- Odsłony: 1291
Re: Po zamianie silników i sterowników serwo problem.
Wstawiłem G61 i jest ok .
A to dlaczego wcześniej na starych podzespołach napędu było ok ?
Silniki mają takie same parametry ?
Czy te przyspieszenia ustawiam w konfiguracji Linuxcnc w Maksymalne Przyspieszenie ?
A to dlaczego wcześniej na starych podzespołach napędu było ok ?
Silniki mają takie same parametry ?
Czy te przyspieszenia ustawiam w konfiguracji Linuxcnc w Maksymalne Przyspieszenie ?
- 11 lis 2022, 14:45
- Forum: CNC podstawy
- Temat: Po zamianie silników i sterowników serwo problem.
- Odpowiedzi: 7
- Odsłony: 1291
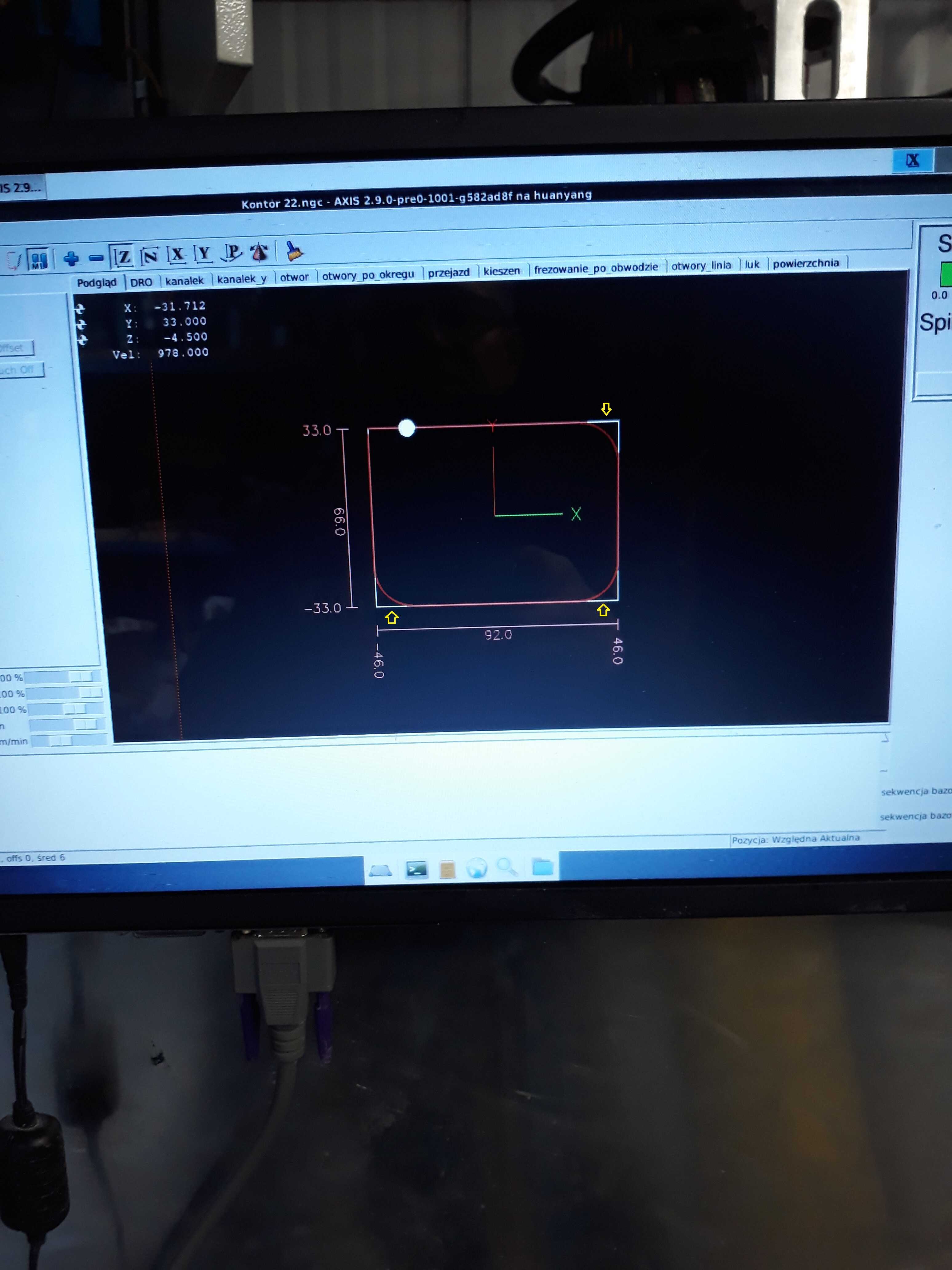
Po zamianie silników i sterowników serwo problem.
Po zamianie silników i sterowników maszynka nie pracuje poprawnie .
Przykład z frezowaniem prostokąta na kątach prostych robi mi łuki.
Gkod sprawdzony na starych silnikach i sterownikach było prawidłowo.
Stare silniki 60H86-3008B sterowniki 2M542
Oprogramowanie Linuxcnc
Nowe siniki i silniki
Serwo silnik krokowy model 86EBP111ALC-TK0
Sterownik serwo krokowy ZDM-2HA865
Przykład z frezowaniem prostokąta na kątach prostych robi mi łuki.
Gkod sprawdzony na starych silnikach i sterownikach było prawidłowo.
Stare silniki 60H86-3008B sterowniki 2M542
Oprogramowanie Linuxcnc
Nowe siniki i silniki
Serwo silnik krokowy model 86EBP111ALC-TK0
Sterownik serwo krokowy ZDM-2HA865






