



Dzięki GumiRobot. Widziałem to już z pięć lat temu:) Z gościem jednak nie mogę się skontaktować.
Pytanie następne: mam jakąkolwiek kinematykę skompilowaną. Jak ją zastosować w konkretnej konfiguracji?
Na przykład dla robota scara? Uruchomić konfigurator z przykładową konfiguracją scara i przerobić pliki INI i HAL i w nich dodatkowo dać odnośnik do nowej kinematyki?
Znaleziono 3 wyniki
Wróć do „Dodatkowa kinematyka LinuxCNC”
- 08 maja 2017, 20:14
- Forum: LinuxCNC (dawniej EMC2)
- Temat: Dodatkowa kinematyka LinuxCNC
- Odpowiedzi: 61
- Odsłony: 20642
- 02 maja 2017, 05:02
- Forum: LinuxCNC (dawniej EMC2)
- Temat: Dodatkowa kinematyka LinuxCNC
- Odpowiedzi: 61
- Odsłony: 20642
Dzięki Tomasz_K za linki.
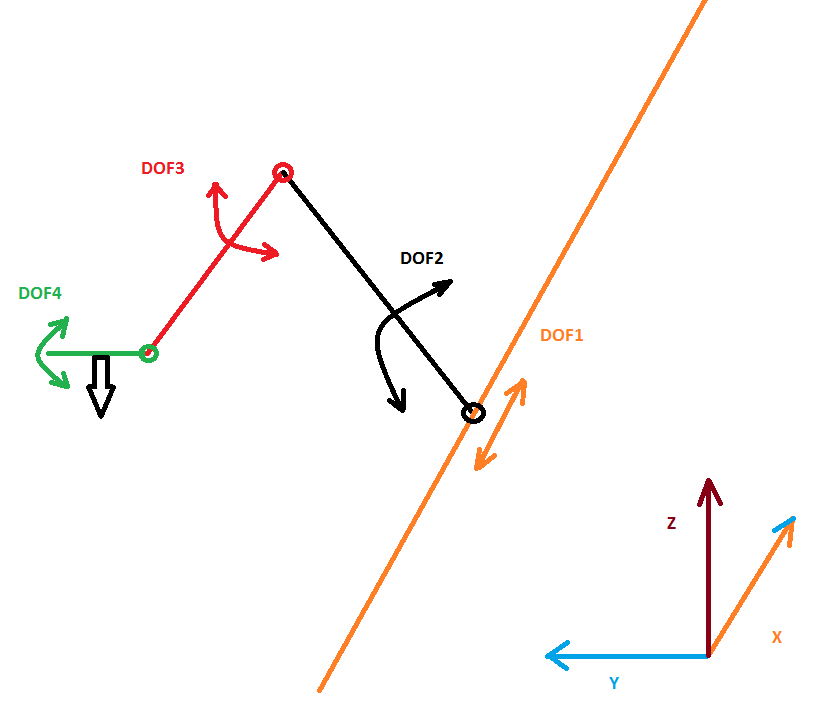
Ma ktoś pojęcie jak połączyć ramię typu scara z ruchem liniowym w jednej osi? chodzi mi o to, żeby w osi X jeździł wózek, na którym jest ramię, które realizuje tylko ruch w płaszczyźnie YZ. X ma być liniowe. Czyli idąc od bazy:
1. pierwszy DOF to oś liniowa (X)
2. drugi DOF to oś obrotowa
3. trzeci DOF to oś obrotowa
4. czwarty DOF też obrotowy, bo narzędzie (czarna strzałka na rysunku) musi być cały czas prostopadle do stołu wzdłuż którego jeździ sobie cały układ.
no za cholerę...
poniżej rysunek - wiem, że prymitywny, ale i tak lepszy od niektórych prac wiszących na ścianach w galeriach sztuki;P
Ma ktoś pojęcie jak połączyć ramię typu scara z ruchem liniowym w jednej osi? chodzi mi o to, żeby w osi X jeździł wózek, na którym jest ramię, które realizuje tylko ruch w płaszczyźnie YZ. X ma być liniowe. Czyli idąc od bazy:
1. pierwszy DOF to oś liniowa (X)
2. drugi DOF to oś obrotowa
3. trzeci DOF to oś obrotowa
4. czwarty DOF też obrotowy, bo narzędzie (czarna strzałka na rysunku) musi być cały czas prostopadle do stołu wzdłuż którego jeździ sobie cały układ.
no za cholerę...
poniżej rysunek - wiem, że prymitywny, ale i tak lepszy od niektórych prac wiszących na ścianach w galeriach sztuki;P
- 29 kwie 2017, 08:25
- Forum: LinuxCNC (dawniej EMC2)
- Temat: Dodatkowa kinematyka LinuxCNC
- Odpowiedzi: 61
- Odsłony: 20642
koledzy. Szukam materiałów, które pozwolą posiąść wiedzę na temat dodatkowej kinematyki dla linuxcnc. Widzę, że jakieś tutoriale były kilka lat temu, ale pliki z linków zostały usunięte:(
Nawet na stronie:
http://linuxcnc.org/docs/html/motion/kinematics.html
temat kinematyki jest tylko liźnięty. Chciałbym przerobić kinematykę scara dodając jeszcze jeden DOF.
Macie jakieś linki, źródła, tutoriale, które są dla ludzi(nie po robotyce)?:)
Nawet na stronie:
http://linuxcnc.org/docs/html/motion/kinematics.html
temat kinematyki jest tylko liźnięty. Chciałbym przerobić kinematykę scara dodając jeszcze jeden DOF.
Macie jakieś linki, źródła, tutoriale, które są dla ludzi(nie po robotyce)?:)






