




")
Pliki są w starej wersji Kicad, ale jakoś się otwierają.
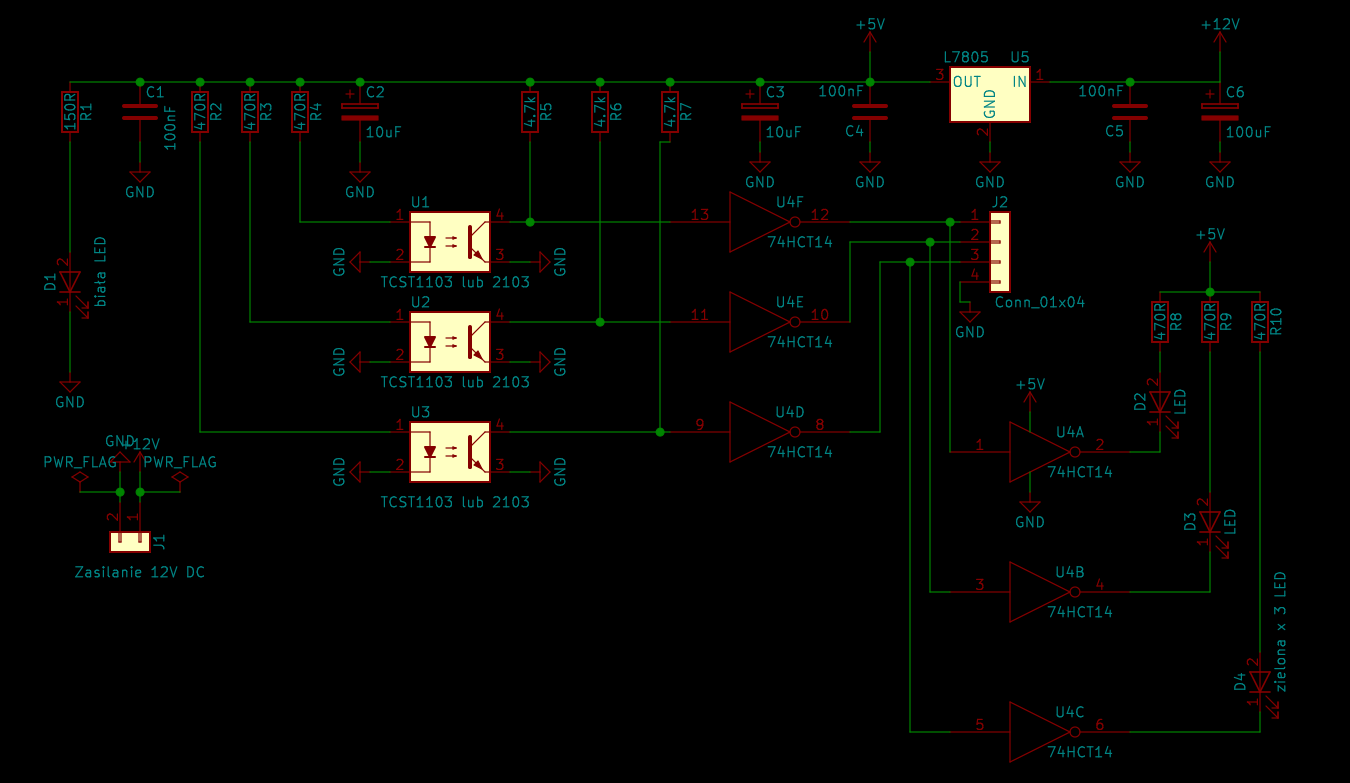
Schemat wygląda na prawidłowy, natomiast płytka jest totalnym absurdem i niech nikt nie próbuje jej robić.
Co do zasady, to transoptory muszą być rozmieszczone odpowiednio do mechanicznych wymiarów tarczy.
Transoptor indeksu musi widzieć tylko otwór indeksu, a transoptory A i B mają dawać przebieg przesunięty dokładnie o 90 stopni.
Natomiast tarcza musi być wykonana tak, żeby szerokość otworu i przerwy była taka sama.
Oczywiście Linuxcnc będzie tolerował kulawy przebieg, ale czym bardziej będzie się on różnił od idealnego, tym bardziej będzie spadała maksymalna częstotliwość pracy enkodera.
Nie należy też przesadzać z ilością otworów.
Przykładowo przy stu otworach i prędkości 2000 obr/min dostaniemy przebieg z jednego kanału o częstotliwości 3333 Hz. Przy enkoderze kwadraturowym trzeba sygnał próbkować czterokrotnie częściej, czyli minimalna częstotliwość próbkowania to 13333 Hz, czyli maksymalny base_thread=75000. To są jeszcze całkiem rozsądne wartości, ale ja uważam je za maksymalne.
Wyciągnąłem ten schemat, żeby nikt nie musiał instalować Kicada żeby go zobaczyć :



")
")
")






