



")
Maszyna już pracowała na innym kompie, połączenia przetestowane, nie mam tego kompa ani konfiguracji, zaczynam przygodę
Mam problem z wstępną konfiguracją w step conf, mianowicie:
Posiadam SSK-MB :
https://www.akcesoria.cnc.info.pl/242-s ... nc-ssk-mb1
zwory ustawione na pół kroku (wszystkie jumpery rozwarte).
1. nie znalazłem informacji, co to dokładnie oznacza: czy pracę półkrokową, czy ogólnie mikrokrokową (ponieważ sterowniki silników mam ustawione na 1/8 kroku)?
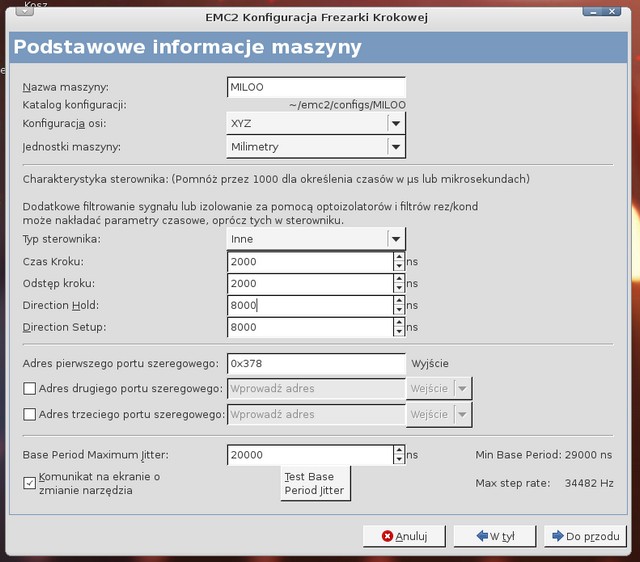
2. Jakie czasy ustawić w bazowej konfiguracji?
http://www.linuxcnc.org/docs/2.7/html/c ... nformation
znalazłem kilka opcji:
a) Gecko 540, (coś tam kręci silnikami, ale da się zatrzymać ręką, co moim zdaniem nie powinno występować przy silniku 1.5A)
b)
c) linuxcnc-problem-z-konfiguracja-t36365- ... mb#p262863
Konfiguracja osi.
http://www.linuxcnc.org/docs/2.7/html/c ... figuration
Mam sterowniki praktycznie identyczne z tymi:
http://www.ottop.republika.pl/sterownik8435.shtml
ustawione na 1/8 kroku (wszystkie jumpery rozwarte) + śruba metryczna 1.25mm skoku.
3. Co ustawić w parametrze mikrokroki? Jest jedynie objaśnione, że dla półkroku wpisać 2, czyli 8 dla 1/8 kroku? Pytam ponieważ silnik jedzie poprawnie zadaną ilość milimetrów (np. 30mm) jak wpiszę 4...
Wspomniałem, że silniki mam 1.5A, i że podczas pracy można je zatrzymać ręką (za oś napędową - gwint metryczny 1.25 skok). Chciałbym zwiększyć moment silnika.
4. Czy zmniejszyć ilość mikrokroków na sterowniku, aby zwiększyć prąd cewek i zwiększyć moment silnika? Jak to jest liczone? (ogarniam stronę elektroniczną, miernik i oscyloskop nie są obce
5. Czy prąd nominalny silnika to prąd jednej cewki w momencie momentu trzymającego i co za tym idzie praca mikrokrokowa polega na zmniejszeniu prądu pojedynczych mikrokroków przez 2,4,8 itp?
Reszta pytań później, nie chcę przeginać na początek.
pozdrawiam,



")






