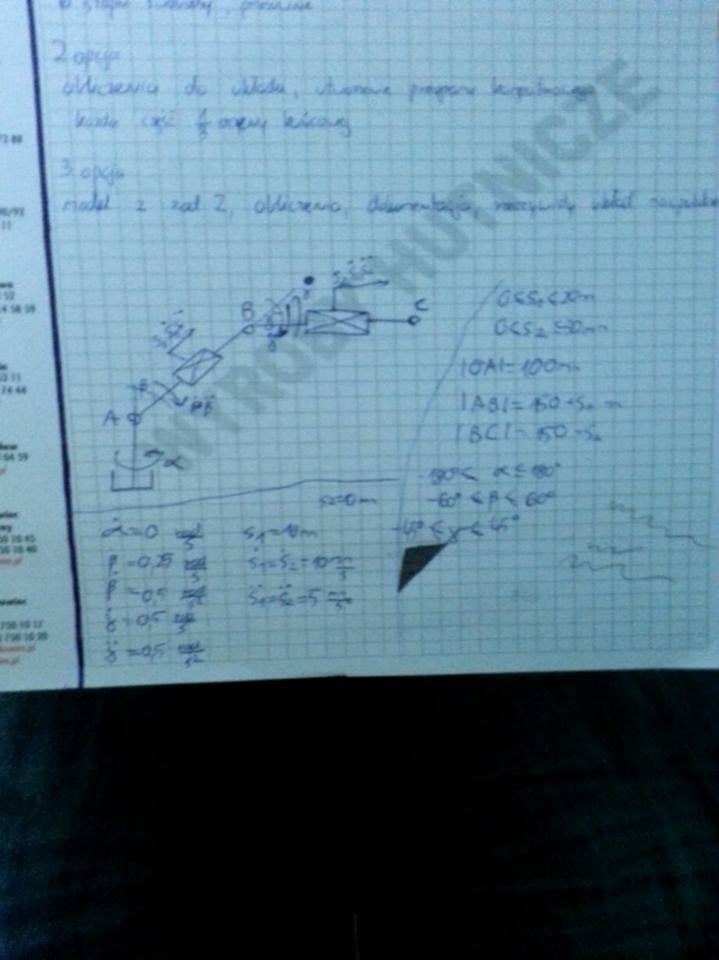
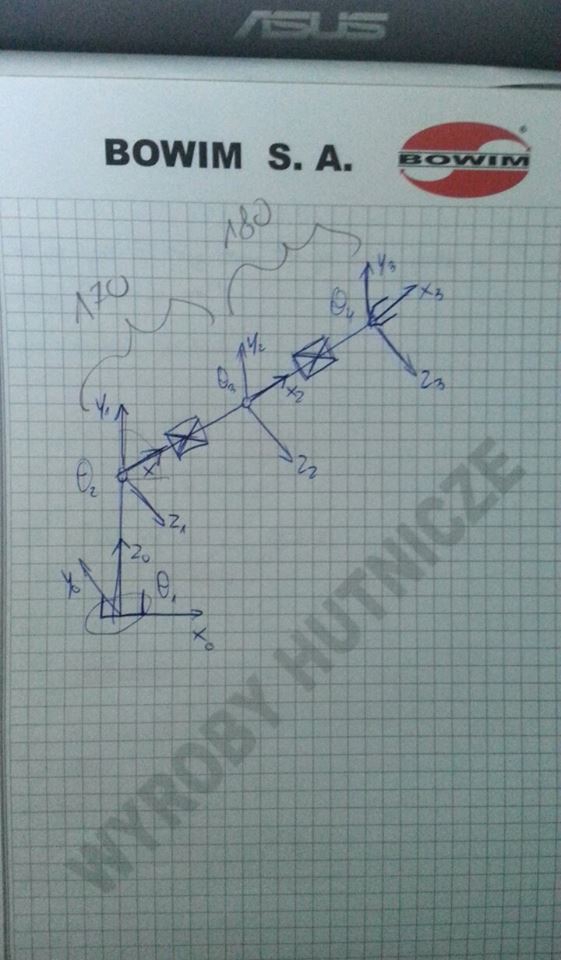
Jestem studentem 4 semestru Automatyki i Robotyki, mam do zrealizowania projekt robota na podstawie podanego schematu i danych. Szukam pomocy przy wyznaczeniu prędkości i przyśpieszeń metodą wykreślną (superpozycji) układu. Niestety kinematyka była moją najsłabszą stroną na mechanice i teraz to niestety daje o sobie znać. Jeśli jest tutaj ktoś z jakimiś propozycjami to byłbym bardzo wdzięczny za pomoc