




")
Instaluję do podwójnej piły taśmowej wskaźniki laserowe. Ze względów mechanicznych oraz na możliwość oślepiania operatora montaż ich na korpusach pił odpada.Piły rozsuwają się symetrycznie, napęd pozycji siłownik hydrauliczny, 2 prędkości przesuwu- szybko-wolno, odczyt położenia enkoder linkowy.
Lasery chcę umieścić nad stanowiskiem operatora, na jednej szynie i dwóch wózkach 15-tkach, sprzężone listwą zębatą jak na rysunku:
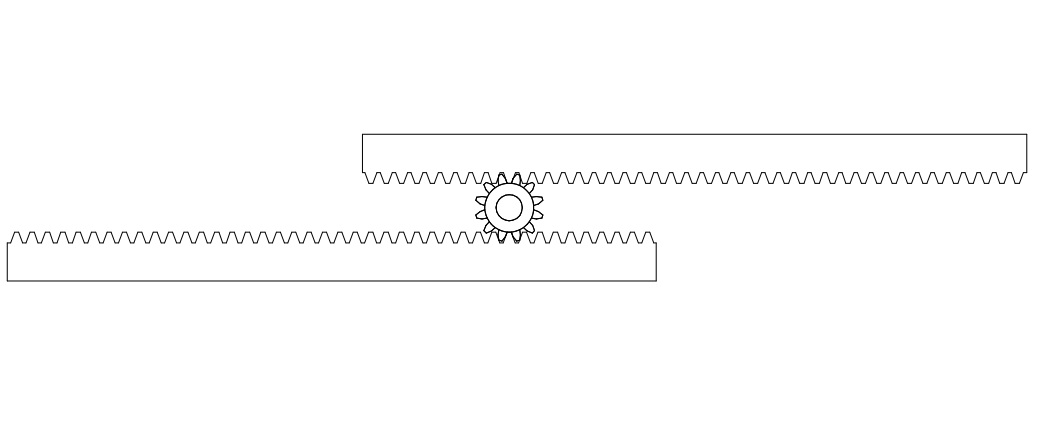
Zębatka napędzana krokówką.
Problem mam z połączeniem elektrycznym z istniejącym systemem pozycjonowania (o dokładności 0,2mm).
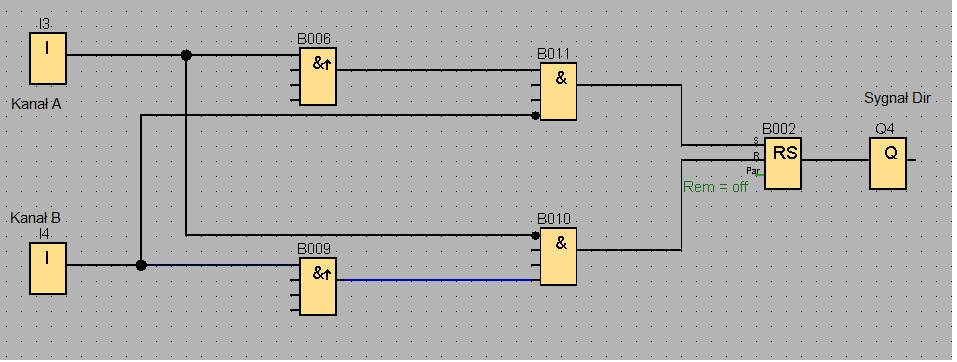
Pierwszy pomysł to wykorzystać sygnały sterujące elektrozaworami (poprzez przekaźniki) jako sygnały DIR, a impulsy z enkodera ( wystarczy z jednego kanału) jako Step.
Druga wersja to zamontować krokówkę + plus sterownik do hybrydy z wejściem enkoderowym tylko zamiast enkodera z silnika podać sygnał z enkodera pił. Sterownik powinien automatycznie korygować położenie.
Czy moje założenia są słuszne?



")






