



Zmieniam budowę swojej maszynki i przy okazji zmieniłem też sposób napędu z krokówek na serwo wybór padł na whale3
Usiłuję skonfigurować sterowniki ale mam straszny problem z podłączeniem się z nimi wczoraj po całym dniu walki, zmienianiu driverów (oryginalne ze strony FTDI), wymiany kabla USB, próbowanie na różnych komputerach XP i VISTA udało mi się podłączyć z jednym. Oczywiście łączenie polega na 20'krotnym kliknięciu na połącz i dopiero uzyskuję połączenie. Niestety drugi sterownik nie ma najmniejszej ochoty ze mną rozmawiać, servokonfigurator widzi go (numer seryjny) ale nie chce się z nim połączyć. Jakieś sugestie ? pomóżcie bo już mi ręce opadły.
Whale3 pomocy



")
-
 mumin
mumin
Autor tematu - Specjalista poziom 2 (min. 300)
")
- Posty w temacie: 6
- Posty: 577
- Rejestracja: 01 gru 2004, 14:44
- Lokalizacja: śląsk
Sterowniki są nowe, co prawda leżały w pudełku prawie dwa lata ale ...
Zaraz po zakupie jeden z nich podłaczyłem do silnika i bawiłem się w konfigurację, wtedy łaczyłem się z nim bez problemu za pierwszym razem, teraz sprawiał kłopoty.
Generalnie problem już nieistnieje chciałbym coś napisać żeby przydało się to innym ale ...
Sterownik który nie chciał ze mną rozmawiać rozpoczął współpracę po podłaczeniu encodera ? teraz łączę się bez problemu nawet bez podłaczenia jakiegokolwiek kabelka USB oczywiście tak. Wygląda że po prostu zardzewiały
Ustawiłęm silniki kręcą ok ale nie śpiewają czy ktoś mógłby mi podpowiedzieć jakie wartości wpisywać i skąd one się biorą ? na forum nic niestety nie znalazłem oprócz informacji aby obserwować "oscylogram" w servoconfig jaki powinien być prawidłowy ?
Zaraz po zakupie jeden z nich podłaczyłem do silnika i bawiłem się w konfigurację, wtedy łaczyłem się z nim bez problemu za pierwszym razem, teraz sprawiał kłopoty.
Generalnie problem już nieistnieje chciałbym coś napisać żeby przydało się to innym ale ...
Sterownik który nie chciał ze mną rozmawiać rozpoczął współpracę po podłaczeniu encodera ? teraz łączę się bez problemu nawet bez podłaczenia jakiegokolwiek kabelka USB oczywiście tak. Wygląda że po prostu zardzewiały
Ustawiłęm silniki kręcą ok ale nie śpiewają
-
muskiel
- Specjalista poziom 1 (min. 100)
- Posty w temacie: 4
- Posty: 152
- Rejestracja: 26 mar 2005, 16:25
- Lokalizacja: Starachowice
Witam,
Sterownik nie chciał się połączyć z 2 powodów:
1. Sterowniki (drivery) do USB powinny być zainstalowane z lokalizacji ../Servoconfig/USB drivers
2. Brak połączenia z enkoderem wywołuje w sterowniku błąd już na starcie.
Wyjaśnienie do pkt1.:
Przy pierwszej instalacji należy podac w/w ściezkę do sterowników USB. Jeżeli będą zainstalowane w trybie 'zainstaluj automatycznie' to XP weźmie dowolne sterowniki USB (np od aparatu cyfrowego który był wcześniej podłączany przez USB, albo pierwsze lepsze z Windows Update)
Wyjaśnienie do pkt.2:
Dzieje się tak dlatego, że sterownik musi mieć różne stany na wejściu enkodera (i do tego różnicowe, czyli 4 linie). Ma to zabezpieczyć przed "uciekaniem" silnika po zaniku sygnału z enkodera (np. uszkodzenie, rozłączenie) i tym samym zapobiec np. kolizji maszyny.
Ustawienia:
Napisz kolego jaki masz silnik?
Wykres: okno analizy jest wyskalowane na 1/3s (333ms)
Ustalenie sie silnika na pozycji po wydaniu komendy analiza powinno nastapić w jak najkrótszym czasie. Innymi słowy, większość lini pozycji aktualnej powinna się pokrywac z osią w wartości 0 (zero).
Po wydaniu komedy analiza, procesor sterownika ustawia pozycję zadaną na 100 (standardowe ustawienie ilości kroków przy przycisku analiza). Dlatego pierwsza linia jest pionowa, i wtedy błąd wynosi 100. Dzieje się to w praktycznie zerowym czasie.
Wszystko na prawo od tej linii pokazuje jak sterownik stara się przywrócić oś silnika do pozycji zerowej (czyli wyeliminować uchyb). I tak, oś jest obracana w kierunku zmniejszania błędu, następnie błąd przechodzi w odwrotny znak (silnik nie może zahamować w zerowym czasie) i dalej ma dążyć do zera. Jakość sprzężenia to jak najkrótszy czas powrotu do pozycji zerowej, brak oscylacji po stawieniu na pozycji oraz brak samowzbudzania (drgania bez zadanej zmiany pozycji)
Spróbuj dać Ap bardzo małe, np 100, a zobaczysz jak wydłuża się czas ustawienia na pozycji.
Pozdrawiam
Piotr
Sterownik nie chciał się połączyć z 2 powodów:
1. Sterowniki (drivery) do USB powinny być zainstalowane z lokalizacji ../Servoconfig/USB drivers
2. Brak połączenia z enkoderem wywołuje w sterowniku błąd już na starcie.
Wyjaśnienie do pkt1.:
Przy pierwszej instalacji należy podac w/w ściezkę do sterowników USB. Jeżeli będą zainstalowane w trybie 'zainstaluj automatycznie' to XP weźmie dowolne sterowniki USB (np od aparatu cyfrowego który był wcześniej podłączany przez USB, albo pierwsze lepsze z Windows Update)
Wyjaśnienie do pkt.2:
Dzieje się tak dlatego, że sterownik musi mieć różne stany na wejściu enkodera (i do tego różnicowe, czyli 4 linie). Ma to zabezpieczyć przed "uciekaniem" silnika po zaniku sygnału z enkodera (np. uszkodzenie, rozłączenie) i tym samym zapobiec np. kolizji maszyny.
Ustawienia:
Napisz kolego jaki masz silnik?
Wykres: okno analizy jest wyskalowane na 1/3s (333ms)
Ustalenie sie silnika na pozycji po wydaniu komendy analiza powinno nastapić w jak najkrótszym czasie. Innymi słowy, większość lini pozycji aktualnej powinna się pokrywac z osią w wartości 0 (zero).
Po wydaniu komedy analiza, procesor sterownika ustawia pozycję zadaną na 100 (standardowe ustawienie ilości kroków przy przycisku analiza). Dlatego pierwsza linia jest pionowa, i wtedy błąd wynosi 100. Dzieje się to w praktycznie zerowym czasie.
Wszystko na prawo od tej linii pokazuje jak sterownik stara się przywrócić oś silnika do pozycji zerowej (czyli wyeliminować uchyb). I tak, oś jest obracana w kierunku zmniejszania błędu, następnie błąd przechodzi w odwrotny znak (silnik nie może zahamować w zerowym czasie) i dalej ma dążyć do zera. Jakość sprzężenia to jak najkrótszy czas powrotu do pozycji zerowej, brak oscylacji po stawieniu na pozycji oraz brak samowzbudzania (drgania bez zadanej zmiany pozycji)
Spróbuj dać Ap bardzo małe, np 100, a zobaczysz jak wydłuża się czas ustawienia na pozycji.
Pozdrawiam
Piotr
-
mumin
Autor tematu - Specjalista poziom 2 (min. 300)
- Posty w temacie: 6
- Posty: 577
- Rejestracja: 01 gru 2004, 14:44
- Lokalizacja: śląsk
To akurat jest dla mnie bardzo jasne i tak właśnie zrobiłem pisałem zresztą w pierwszym poście że zainstalowałem najnowsze drivery ze strony producentamuskiel pisze: Wyjaśnienie do pkt1.:
Przy pierwszej instalacji należy podac w/w ściezkę do sterowników USB. Jeżeli będą zainstalowane w trybie 'zainstaluj automatycznie' to XP weźmie dowolne sterowniki USB (np od aparatu cyfrowego który był wcześniej podłączany przez USB, albo pierwsze lepsze z Windows Update)
To akurat nie ma żadnego znaczenia, przy próbie łączenia się ze sterownikiem na "sucho" w celu wpisania parametrów pracy można się z nim połączyć używając jedynie kabla usb nie jest konieczne podpinanie jakichkolwiek innych przewodów (sprawdzone)muskiel pisze: Wyjaśnienie do pkt.2:
Dzieje się tak dlatego, że sterownik musi mieć różne stany na wejściu enkodera (i do tego różnicowe, czyli 4 linie). Ma to zabezpieczyć przed "uciekaniem" silnika po zaniku sygnału z enkodera (np. uszkodzenie, rozłączenie) i tym samym zapobiec np. kolizji maszyny.
MINERTIA J-series UGJMEE-03L0D11 nie udało mi się znaleźć jakiejkolwiek informacji w necie na jego temat jeśli ktoś ma coś na ich temat to chętnie się zapoznałbym.muskiel pisze: Napisz kolego jaki masz silnik?
Jeśli chodzi o nastawy to ustawiłem tak:
AP - 800
AD - 500
AI - 20
Ale nie jestem ich pewien może można by było coś lepiej ustawić ? generalnie silniki kręcą się spokojnie bez szarpnięć i oscylacji więc chyba w miarę ok
JG
-
muskiel
- Specjalista poziom 1 (min. 100)
- Posty w temacie: 4
- Posty: 152
- Rejestracja: 26 mar 2005, 16:25
- Lokalizacja: Starachowice
Tak, pisałeś że ze strony producenta FTDI. Ja pisałem o producencie sterownika...To akurat jest dla mnie bardzo jasne i tak właśnie zrobiłem pisałem zresztą w pierwszym poście że zainstalowałem najnowsze drivery ze strony producenta
Mozliwe, jak masz wersje sprzed 2 lat...To akurat nie ma żadnego znaczenia, przy próbie łączenia się ze sterownikiem na "sucho" w celu wpisania parametrów pracy można się z nim połączyć używając jedynie kabla usb nie jest konieczne podpinanie jakichkolwiek innych przewodów (sprawdzone)
Teraz juz bez enkodera nie wystartuje (DG2S-08020 i 16035)
A moze screen wykresu?AP - 800
AD - 500
AI - 20
Ad duuzo za male, prawdopodobnie silnik jest ślamazarny.
Li powinno byc max (65535)
Coż, do ustawien pasowaloby wiedziec chocby prad silnika. Najlepiej zwiekszyc Ad na max a Ap zmniejszyc np na 500. Potem Ap zwiekszac (np po 100) a Ad zmniejszac (np po 2-3000). Ai jak dasz 30-40 to bedzie szybciej reagowal, ale stanie sie bardziej niestabilny.
Pzdr
Piotr
-
mumin
Autor tematu - Specjalista poziom 2 (min. 300)
- Posty w temacie: 6
- Posty: 577
- Rejestracja: 01 gru 2004, 14:44
- Lokalizacja: śląsk
Li mam ustawione na 65000
Prąd silnika 0,54A przy 24V (nie mam pojęcia jak duże napięcie mogę zastosować)
Silnik jest faktycznie ślamazarny
Początkowo miałem ustawienia :
AP- 3000
AD- 55000
AI - 30
Ale podczas przesuwu silnik dostawał jakiś uderzeń co jakiś czas co mi się nie podobało i zacząłem eksperymenty teraz pracuje płynnie ale wolno.
ekran aż wstyd pokazywać chyba nie tak to miało wyglądać

Po prostu zmieniałem dane nie patrząc na wykres aż otrzymałem płynną pracę silników, dzisiaj wykonałem próbne frezowanie idzie dobrze ale wolno i nie wiedzieć dlaczego napis grawerowany na plexi jest czytelny (poprawny) ale od spodu ?
Prąd silnika 0,54A przy 24V (nie mam pojęcia jak duże napięcie mogę zastosować)
Silnik jest faktycznie ślamazarny
Początkowo miałem ustawienia :
AP- 3000
AD- 55000
AI - 30
Ale podczas przesuwu silnik dostawał jakiś uderzeń co jakiś czas co mi się nie podobało i zacząłem eksperymenty teraz pracuje płynnie ale wolno.
ekran aż wstyd pokazywać chyba nie tak to miało wyglądać
Po prostu zmieniałem dane nie patrząc na wykres aż otrzymałem płynną pracę silników, dzisiaj wykonałem próbne frezowanie idzie dobrze ale wolno i nie wiedzieć dlaczego napis grawerowany na plexi jest czytelny (poprawny) ale od spodu ?
-
muskiel
- Specjalista poziom 1 (min. 100)
- Posty w temacie: 4
- Posty: 152
- Rejestracja: 26 mar 2005, 16:25
- Lokalizacja: Starachowice
Zaznaczyłem na wykresie jak to powinno wygladac.
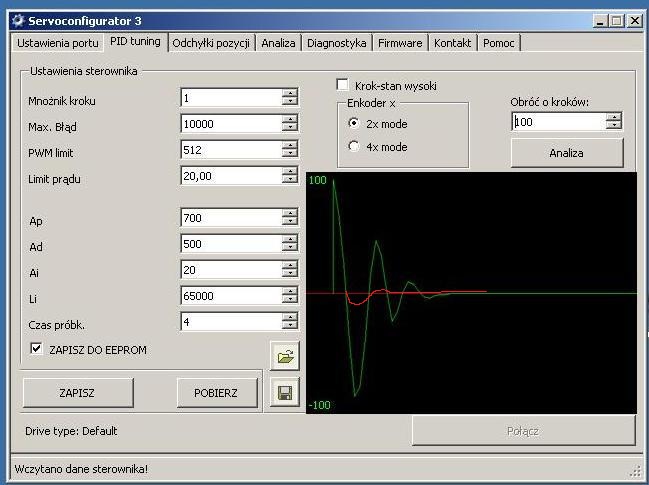
Powinno byc jedno przestrzelenie ponizej zera, potem wykres wzdluz osi.
Co do frezowania, to jezeli servo jest ślamazarne to beda wychodzic rozne dziwne rzeczy. Mozesz podczas frezowania otworzyć zakładkę odchyłki pozycji (Whale3 podlaczony USB), i zobaczyc jakie sa wartosci odchylek podczas frezowania. mozna to latwo przeliczyc na jednostki dlugosci.
Tak jak pisalem, Ad po kilka tysiecy, ale nie o rząd wielkości. to samo dotyczy Ap.
Warto jeszcze wiedziec jaka jest rozdizelczosc enkodera. Powyzej pewnej wartosci servo moze byc niestabilne.
Z doswiadczenia powiem ze Whale3 bedzie pracowal plynnie i szybko z enkoderem do 1000ppr (pulsów na obrót, czyli po zdekodowaniu). Zalezy to tez od jakosci silnika (i jego szybkosci reakcji na zmiane polozenia zadanego).
pzdr
Piotr
Powinno byc jedno przestrzelenie ponizej zera, potem wykres wzdluz osi.
Co do frezowania, to jezeli servo jest ślamazarne to beda wychodzic rozne dziwne rzeczy. Mozesz podczas frezowania otworzyć zakładkę odchyłki pozycji (Whale3 podlaczony USB), i zobaczyc jakie sa wartosci odchylek podczas frezowania. mozna to latwo przeliczyc na jednostki dlugosci.
Od tych parametrów zacznij strojenie. Jak bedzie niestabilny to obnizaj Ap i podwyzszaj Ad.AP- 3000
AD- 55000
AI - 30
Tak jak pisalem, Ad po kilka tysiecy, ale nie o rząd wielkości. to samo dotyczy Ap.
Warto jeszcze wiedziec jaka jest rozdizelczosc enkodera. Powyzej pewnej wartosci servo moze byc niestabilne.
Z doswiadczenia powiem ze Whale3 bedzie pracowal plynnie i szybko z enkoderem do 1000ppr (pulsów na obrót, czyli po zdekodowaniu). Zalezy to tez od jakosci silnika (i jego szybkosci reakcji na zmiane polozenia zadanego).
pzdr
Piotr
-
mumin
Autor tematu - Specjalista poziom 2 (min. 300)
- Posty w temacie: 6
- Posty: 577
- Rejestracja: 01 gru 2004, 14:44
- Lokalizacja: śląsk
Wczoraj ponownie zacząłem bawić się w dostrajanie ponieważ irytuje mnie jedna przypadłość - podczas pracy maszyny co jakiś czas słychać "uderzenia" w silnik (wszystkie osie) mimo chęci nie udało mi się tego efektu zniwelować.
Jednak nie jestem do końca pewien skąd może się brać taki efekt ?
- brak zestrojenia
- zakłócenia typu kabel, ekranowanie itp
- impulsy dodatkowe z komputera, kiedyś bawiąc się jeszcze silnikami krokowymi był to dla mnie podstawowy problem zabawy z silnikami pod windows ciągłe sprawdzanie systemu czy coś nie zostało podpięte do portu powodowało właśnie podobny efekt.
Miałbym jeszcze jedno pytanko o podłączenie enkodera, w instrukcji whale3 pisze że kabel powinien być dłuższy niż 1m o co chodzi ? zawsze myślałem że im krótszy tym lepszy.
o co chodzi ? zawsze myślałem że im krótszy tym lepszy.
Jednak nie jestem do końca pewien skąd może się brać taki efekt ?
- brak zestrojenia
- zakłócenia typu kabel, ekranowanie itp
- impulsy dodatkowe z komputera, kiedyś bawiąc się jeszcze silnikami krokowymi był to dla mnie podstawowy problem zabawy z silnikami pod windows ciągłe sprawdzanie systemu czy coś nie zostało podpięte do portu powodowało właśnie podobny efekt.
Miałbym jeszcze jedno pytanko o podłączenie enkodera, w instrukcji whale3 pisze że kabel powinien być dłuższy niż 1m






