



optoelektronika z myszki


-
SQ3VAZ
- Specjalista poziom 2 (min. 300)
")
- Posty w temacie: 11
- Posty: 313
- Rejestracja: 17 kwie 2009, 20:41
- Lokalizacja: Przylep
Ja bym przerobił tą tarczką i zostawił mniej otworów. Dajmy na to 10 symetrycznie rozłożonych. Generalnie im wyższa prędkość obrotowa tym mniej obrotów. Nie wiem ile jest przerw w orginalnej tarczy, jednak np. 70 przerw przy 1000 obrotach dale nam 1166 Hz przebieg na wejściu uP. Po co aż tyle. W sumie zależy jak chcesz rozwiązać kwestię pomiaru i jak dokładne wyniki są potrzebne.
- pomiar czasu obrotu poprzez pomiar czasu potrzebnego na zliczenie x impulsów;
- pomiar liczby impulsów na jednostkę czasu.
- pomiar czasu obrotu poprzez pomiar czasu potrzebnego na zliczenie x impulsów;
- pomiar liczby impulsów na jednostkę czasu.
"Wszyscy wiedzą, że czegoś nie da się zrobić, i przychodzi taki jeden, który nie wie, że się nie da, i on właśnie to robi." A.E.
Jeżeli pomogłem - kliknij pomógł. Konstruktywna krytyka mile widziana.
Jeżeli pomogłem - kliknij pomógł. Konstruktywna krytyka mile widziana.
-
SQ3VAZ
- Specjalista poziom 2 (min. 300)
- Posty w temacie: 11
- Posty: 313
- Rejestracja: 17 kwie 2009, 20:41
- Lokalizacja: Przylep
Przy małych prędkościach obrotowych i pomiarze ilości impulsów na jednostkę czasu większa ilość "otworów" zapewnia dokładniejszy wynik. Jednak zakładam, że wykraczamy tutaj poza strefę setek obr/min.
Wszystko jest sprawą względną.
Pozdrawiam.
Wszystko jest sprawą względną.
Pozdrawiam.
"Wszyscy wiedzą, że czegoś nie da się zrobić, i przychodzi taki jeden, który nie wie, że się nie da, i on właśnie to robi." A.E.
Jeżeli pomogłem - kliknij pomógł. Konstruktywna krytyka mile widziana.
Jeżeli pomogłem - kliknij pomógł. Konstruktywna krytyka mile widziana.
-
beowolf
Autor tematu - Specjalista poziom 2 (min. 300)
- Posty w temacie: 21
- Posty: 333
- Rejestracja: 06 kwie 2008, 09:46
- Lokalizacja: Rzeszów
chodzi mi właśnie o zliczanie impulsów. Chcę sterować silnikiem manipulatora. Myślałem, że zrobię to za pomocą potencjometru połączonego z osią obrotu ramienia i przetwornika ADC mikroprocesora. Ale niestety przetwornik jest mało dokładny i różnice w wartości zadanej a otrzymanej bardzo często się zmieniały. Nie wiem jak to jest zrobione w manipulatorach przemysłowych, ale ja chcę zastosować enkoder który będzie w pewnym sensie stabilizował silnik. Enkoder połącze z wałem silnika i zadam mu powiedzmy 100 impulsów do odmierzenia. Przekaładnia z silnika do ramienia (sam robiłem, większy moment 16 razy) powinna zapewnić bardzo mały ruch ramienia w momencie, gdy obciążenie spowoduje opuszczenie się tego ramienia (program mikroprocka będzie cały czas sterował silnikiem tak, aby liczba impulsów była równa 100). Myślicie że to się uda??
-
beowolf
Autor tematu - Specjalista poziom 2 (min. 300)
- Posty w temacie: 21
- Posty: 333
- Rejestracja: 06 kwie 2008, 09:46
- Lokalizacja: Rzeszów
kurde - Leoo a możesz mi wogóle napisać zasadę działania sterowników UHU?? Bo wszędzie pisze o tym sterowaniu PID a w sumie nie wiem jak to działa w tych sterownikach. Wiem co robi ten regulator ale jak realizuje to program?? Prędkości ramienia będą małe ze względu na przełożenie.
Tarcza już działa. Głównym powodem był za duży rezystor diody oraz niedokładne stawienie elementów wobec siebie. Połączyłem równolegle 2 rezystory 330 ohm i teraz jest super. I troche źle tamten schemat narysowałem. Nie da się w nim wykorzystać obu fototranzystorów z tego jednego elementu. Załączam nowy, działąjący scehemat (w paincie:)
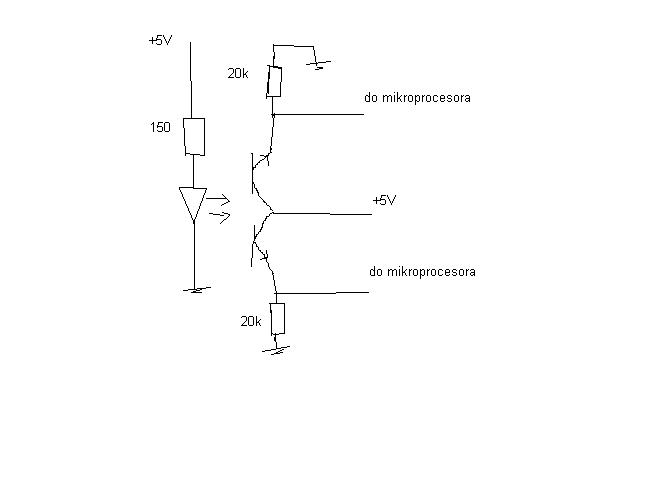
Tarcza już działa. Głównym powodem był za duży rezystor diody oraz niedokładne stawienie elementów wobec siebie. Połączyłem równolegle 2 rezystory 330 ohm i teraz jest super. I troche źle tamten schemat narysowałem. Nie da się w nim wykorzystać obu fototranzystorów z tego jednego elementu. Załączam nowy, działąjący scehemat (w paincie:)
-
Leoo
- Lider FORUM (min. 2000)
")
- Posty w temacie: 6
- Posty: 4017
- Rejestracja: 15 lis 2006, 22:01
- Lokalizacja: Tarnobrzeg
Ogólna zasada działania jest dość oczywista - serwosterownik.beowolf pisze:kurde - Leoo a możesz mi wogóle napisać zasadę działania sterowników UHU??
O szczegóły musisz pytać autora, którym jest Uli Huber.
Na temat implementacji regulatorów PID znajdziesz dużo na elektrodzie. Pozostanie problem dekodowania sygnałów enkodera kwadraturowego, którym jest podwójny transoptor z myszki.
-
SQ3VAZ
- Specjalista poziom 2 (min. 300)
- Posty w temacie: 11
- Posty: 313
- Rejestracja: 17 kwie 2009, 20:41
- Lokalizacja: Przylep
Przeszperaj sobie to:
- http://en.wikipedia.org/wiki/Rotary_encoder
- http://www.fpga4fun.com/QuadratureDecoder.html
Może zrobić tarczę jak na wiki. W sumie dlaczego nie zrobić całego enkodera od początku. Czy rzeczywiście musi być to tak malutkie?
- http://en.wikipedia.org/wiki/Rotary_encoder
- http://www.fpga4fun.com/QuadratureDecoder.html
Może zrobić tarczę jak na wiki. W sumie dlaczego nie zrobić całego enkodera od początku. Czy rzeczywiście musi być to tak malutkie?
"Wszyscy wiedzą, że czegoś nie da się zrobić, i przychodzi taki jeden, który nie wie, że się nie da, i on właśnie to robi." A.E.
Jeżeli pomogłem - kliknij pomógł. Konstruktywna krytyka mile widziana.
Jeżeli pomogłem - kliknij pomógł. Konstruktywna krytyka mile widziana.






