Chcialbym zglebic wiedze na temat tego serwonapędu bo jest to ciekawy temat. Mam w zwiazku z tym 2 glowne pytania:
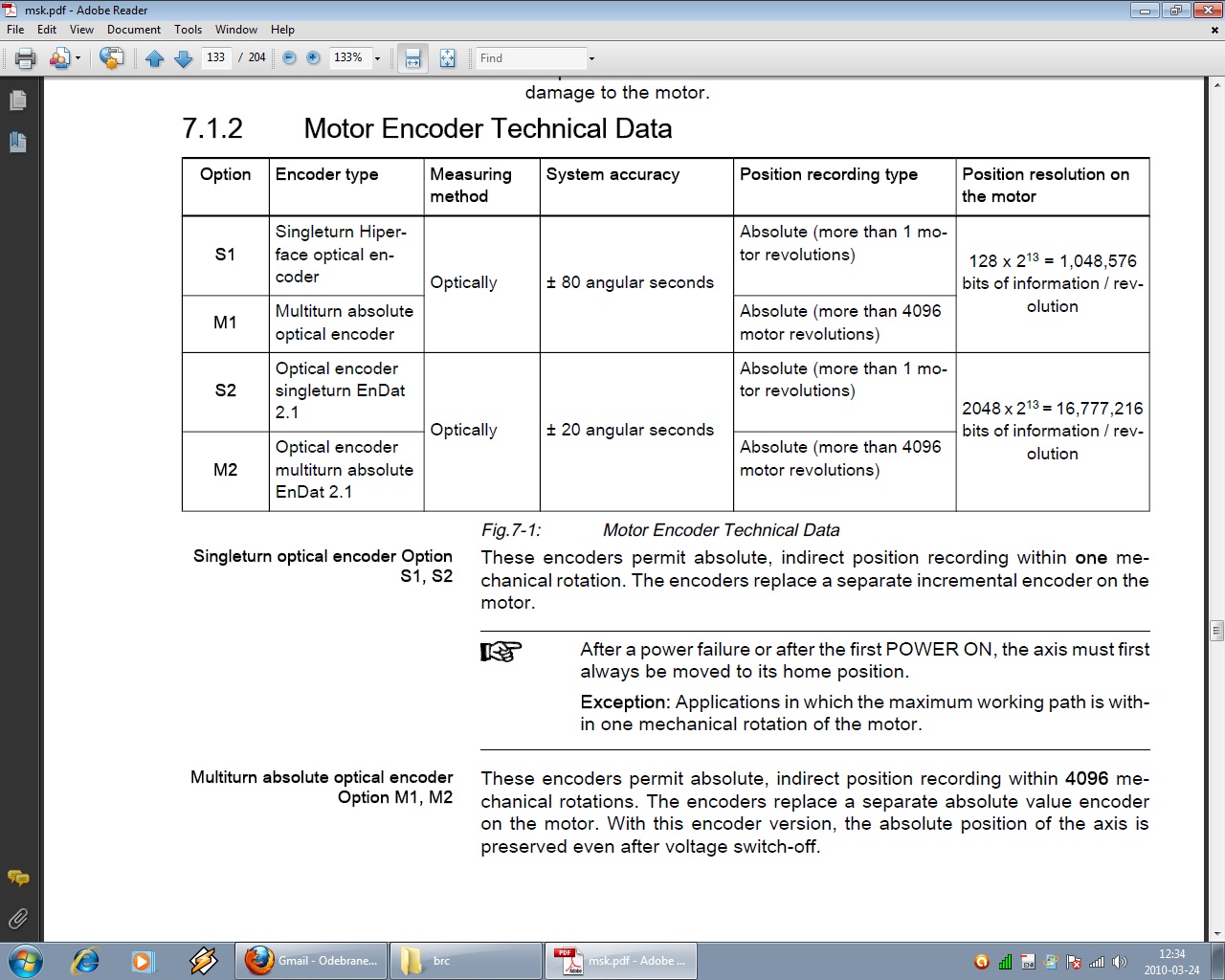
1. Na silniku jest enkoder absolutny optyczny wieloobrotowy. W danych technicznych napisane jest ze mierzy on 128 inkrementów i ponad 4096 obrotow. Nie rozumiem tego. Jesli enkoder jest absolutny to powinien odczytywac z tarczy polozenie wg kodu Graya itp i rozdzielczosc powinna byc jakas podana. A tutaj nic. Wiec czym sa te inkrementy? i jak to sie dzieje ze enkoder wie o ile obrotow sie przekrecil? Czyzby z jedna tarcza byla sprzeżona druga tarcza mowiaca o wykonanych obrotach?
2. Serwonaped ten mozna wykorzystywac w obrabiarkach (tak jest napisane w reklamowkach boscha). Do obslugi tego serwonapedu wykorzystuje IndraWorks. A do zaprogramowania PLC, jego podprogram czyli IndraLogic. Mozna tutaj zadawac predkosci, pozycje itp itd. Jednak jak mozna by wykorzystac ten naped w obrabiarce aby pracowal on w obrabiarce? tzn w czym napisac do niego program CNC? W indraworksie chyba sie nie da, chyba ze mam jakas uboga wersje.
Prosze o wytlumaczenie tych rzeczy.
Jest to serwonaped Boscha Rexrotha: modul zasilajacy HCS02-1e-w0012-a03
modul sterujacy csh01.1c pb ens mem ma1 s1 s
oraz serwosilnik synchroniczny MSK030B.
info z danych technicznych o ekoderze: