dobór steperów
: 05 maja 2010, 09:18
Witam!
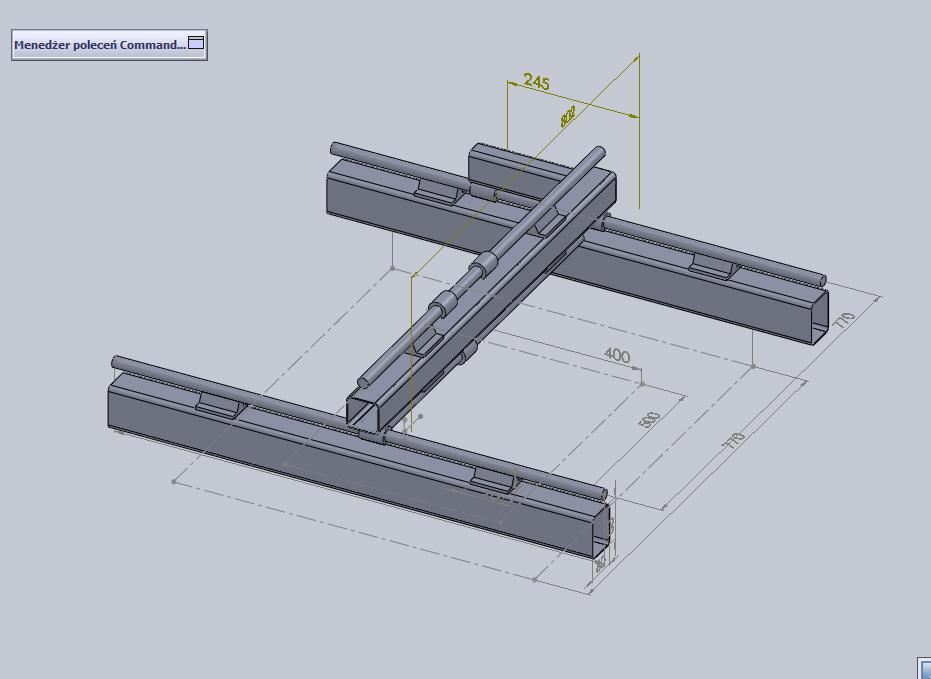
Kombinuję ploter CNC.
Pole a raczej przestrzeń robocza to x:400, y:500, z:100 (mm)
Materiał obrabiany: twarde pianki PS, poliuretanowe, spienione PCV, PM(plexi), MDF, drewno.
Ponieważ jestem amator!!!!!!!!!!!!!!!!! w tych „klockach” więc sprawę zacząłem „profesjonalnie inaczej”
Kupiłem 3 płytki pod sterowniki SSK-B02, skompletowałem części zlutowałem i są.
Pracując w CAD-zie cały czas nad konstrukcją plotera, zmieniając to i owo w miarę postępu prac doszedłem do problemu silników, sposobu ich montażu w ploterze itd
Czyli silniki.
I tu problem i prośba o pomoc!!!!!!!
Kilka uwag „profesjonalnego inaczej”
1 każda z osi x,y,z jest obciążona w różnym stopniu.
Najbardziej ( u mnie) x bo musi pokonać opory związane z frezowaniem, „wozić” oś y i z wraz z silnikami ( 2 razy po jakieś 0,7 kg lekko licząc) no i konstrukcją (też dobrych kilka kilogramów). Wozić musi precyzyjnie i powoli a jak trzeba szybko!!!
Tu planuję jakiś 6-cio przewodowy steper z momentem 1,5- 2 Nm i prądem 3 – 4 A
2 Druga oś y ma już tylko do pokonania opory frezowania plus „wożenie „ już tylko osi z.
Szacuję, że to gdzieś połowa tego co ma do roboty napęd osi x
Planuje to „załatwić” steperem gdzieś około 1Nm
3 Napęd osi z to „robota” tylko 10cm góra dół i to dosyć „radko” w porównaniu z resztą. Myślę, że 0,5 Nm da radę.
Do każdej z osi dobiorę inną średnicę śrub pociągowych tak by optymalizować wszystko, w tym wagę.
I teraz prośba!!!!!!!!!!!
Proszę o krytykę mojego zamysłu. Wylanie wszystkiego co tylko się da !!!!! Zniosę „z podniesionym czołem” bowiem nie liczy się etykieta lecz KTO krytykuje!!!!!
Czy pomysł aby „pomieszać” typy steperów będzie do strawienia dla moich sterowników?
Czy dam radę sterować tym „wynalazkiem” z np. Mach 2 lub 3?
Przekopałem forum, konstrukcje Kolegów i wszyscy stosują tzw „komplety” lub „zestawy” jak kto woli. Tzn te same zestawy sterownik – steper dla wszystkich osi.
Teraz odpowiedź na nie zadane pytanie: a po co to? „czemu to ma służyć” „ nudzisz się pan czy co”. Chcę mieć kompaktowe, lekkie, przenośne urządzenie ale o wymaganej sztywności i akceptowalnych parametrach do pracy w różnych pozycjach , także „do góry nogami”.
Ma to zapewnić specjalny sposób ustalania położenia „ustrojstwa” w przestrzeni, a to już mój osobisty wkład „w podbój kosmosu”
Pozdrówka
Kombinuję ploter CNC.
Pole a raczej przestrzeń robocza to x:400, y:500, z:100 (mm)
Materiał obrabiany: twarde pianki PS, poliuretanowe, spienione PCV, PM(plexi), MDF, drewno.
Ponieważ jestem amator!!!!!!!!!!!!!!!!! w tych „klockach” więc sprawę zacząłem „profesjonalnie inaczej”
Kupiłem 3 płytki pod sterowniki SSK-B02, skompletowałem części zlutowałem i są.
Pracując w CAD-zie cały czas nad konstrukcją plotera, zmieniając to i owo w miarę postępu prac doszedłem do problemu silników, sposobu ich montażu w ploterze itd
Czyli silniki.
I tu problem i prośba o pomoc!!!!!!!
Kilka uwag „profesjonalnego inaczej”
1 każda z osi x,y,z jest obciążona w różnym stopniu.
Najbardziej ( u mnie) x bo musi pokonać opory związane z frezowaniem, „wozić” oś y i z wraz z silnikami ( 2 razy po jakieś 0,7 kg lekko licząc) no i konstrukcją (też dobrych kilka kilogramów). Wozić musi precyzyjnie i powoli a jak trzeba szybko!!!
Tu planuję jakiś 6-cio przewodowy steper z momentem 1,5- 2 Nm i prądem 3 – 4 A
2 Druga oś y ma już tylko do pokonania opory frezowania plus „wożenie „ już tylko osi z.
Szacuję, że to gdzieś połowa tego co ma do roboty napęd osi x
Planuje to „załatwić” steperem gdzieś około 1Nm
3 Napęd osi z to „robota” tylko 10cm góra dół i to dosyć „radko” w porównaniu z resztą. Myślę, że 0,5 Nm da radę.
Do każdej z osi dobiorę inną średnicę śrub pociągowych tak by optymalizować wszystko, w tym wagę.
I teraz prośba!!!!!!!!!!!
Proszę o krytykę mojego zamysłu. Wylanie wszystkiego co tylko się da !!!!! Zniosę „z podniesionym czołem” bowiem nie liczy się etykieta lecz KTO krytykuje!!!!!
Czy pomysł aby „pomieszać” typy steperów będzie do strawienia dla moich sterowników?
Czy dam radę sterować tym „wynalazkiem” z np. Mach 2 lub 3?
Przekopałem forum, konstrukcje Kolegów i wszyscy stosują tzw „komplety” lub „zestawy” jak kto woli. Tzn te same zestawy sterownik – steper dla wszystkich osi.
Teraz odpowiedź na nie zadane pytanie: a po co to? „czemu to ma służyć” „ nudzisz się pan czy co”. Chcę mieć kompaktowe, lekkie, przenośne urządzenie ale o wymaganej sztywności i akceptowalnych parametrach do pracy w różnych pozycjach , także „do góry nogami”.
Ma to zapewnić specjalny sposób ustalania położenia „ustrojstwa” w przestrzeni, a to już mój osobisty wkład „w podbój kosmosu”
Pozdrówka