Strona 1 z 2
Robot - malujący
: 03 sie 2016, 19:29
autor: foreman
Witam
Jestem nowy i przepraszam z góry jeśli nie prawidłowy dział ale myślę że będzie ok.
Planuje wykonać robota do malowania który tak naprawdę będzie służył do malowania powierzchni płaskich i poruszał sie na samobieżnej maszynie.
Proszę o doradztwo na jakiej posuwnicy liniowej mógłby poruszać się pistolet ważący około 1.5kg. Długość listwy to 3m do pistoletu będą podłączone przewody doprowadzające powietrze i płyny, które zapewne też będą stanowiły jakiś opór.
Najważniejszą kwestią tego rozwiązania jest to że jest to praca która będzie powodowała pylenie i wymagane jest zastosowanie takiej posuwnicy lub wózka , który będzie na to odporny.
Dostałem specyfikację z pewnego sklepu internetowego ale nie wiem czy to będzie się do końca nadawało i przed zakupem chciałbym prosić o doradztwo fachowców lub sklepy zainteresowane sprzedażą podzespołów.
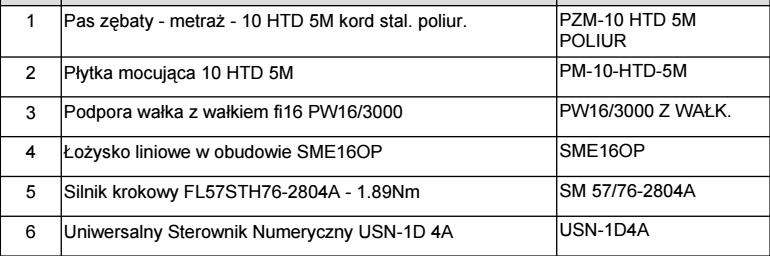
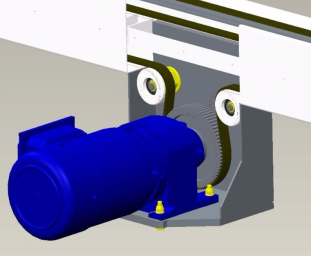
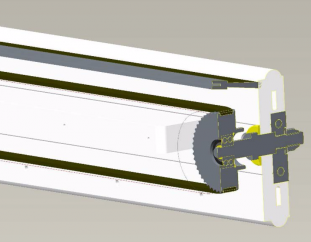
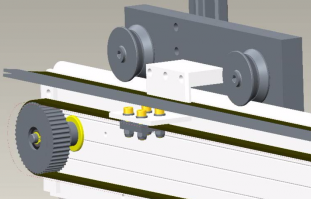
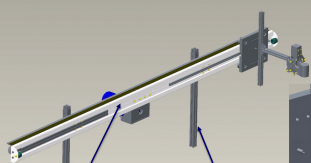
W załączniku info elementów jakie dostałem do zakupu i zdjęcia poglądowe tego co chce osiagnać
: 04 sie 2016, 12:51
autor: krzysiekgrab
Wszystko zależy jakie prędkości robocze kolega chce osiągnąć. Na liście nie ma koła zębatego - od jego średnicy zależy prędkość i 'siła'. Dla tego sterownika wybrałbym silnik 3008B ( 3.1Nm) - z oferty sponsora forum, tak aby maksymalnie wykorzystać potencjał układu. Myślę, że taki silnik będzie wystarczający dla 2kg masy...
: 04 sie 2016, 19:52
autor: foreman
Prędkość taka sama jak malowanie ręczne, i najlepiej aby była regulowana uzgodniłem już, że będzie to Generator impulsów prostokątnych GEN-01.
Tylko zastanawiam się jeszcze nad możliwością ograniczeń ruchu np: jeśli prowadnica będzie miała długość A1-A10 to chciałbym uzyskać możliwość poruszania się np: a1-a10, a1-a4, a3-a8. Czy to już wyzsza szkoła jazdy. Na odcinku 3m chciałbym zdefiniować około 10 takich punktów, które mogły by być definiowane na początku przystąpienia do prac. Komercyjne rozwiązania zawierają napędy łańcuchowe i tutaj nasuwa się również pytanie czy to nie lepsze rozwiązanie dla napedu pracującego w trudnych warunkach.
: 05 sie 2016, 06:58
autor: krzysiekgrab
Dla dwóch skrajnych punktów możliwe jest sterowanie generatorem. W takim przypadku sugeruję sterownik ssk-b13 -posiada on wbudowany generator z możliwością ustawienia rampy oraz obsługą krańcówek limitowych-ułarwi to zadanie. Ale jeżeli chodzi o 10 punktów pomiędzy którymi chcemy się poruszać, to przy pomocy generatora ciężko będzie to zrobić. Najłatwiej będzie w takim przypadku użyć sterownika plc z szybkimi wyjściami do sterowania kroków ki. Do tego jakiś wyświetlacz przy pomocy którego ustawimy parametry pracy i będzie fajne sterowanie.koszt prostego sterownika na jeden silnik to jakieś 500-600zl.panel kosztuje z 400zl. Do tego dochodzi koszt napisania programu.Mysle ze z 500-700zl. Program oczywiście można napisać samemu. Plc obsłuży również krańcówki, czy przyciski. Co do silnika i prędkości to myślę, że 3Nm w zupełności powinno wystarczyć. Napęd najprościej będzie chyba zrobić na pasku. Konstrukcję trzeba będzie tak rozwiazac, aby zabezpieczyć go przed farbą.
: 05 sie 2016, 16:23
autor: dance1
a nie lepiej już pełne 2 osiowe cnc? X,Y sterowane linuxem, machem itd, program prosty do bólu, do malowania wygląda jak program na frezarkę do planowania powierzchni, czy stołu

przynajmniej tak wygląda w moim robocie. Definiowanie punktów startowych, różnych obszarów roboczych bez żadnego ograniczenia.
: 05 sie 2016, 22:51
autor: foreman
Docelowo to ma być na dwie osie, ale jedynym problemem jest środowisko pracy tzn możliwość uszkodzenia napędów w pionie rozważałem napęd śróbowy tutaj pasuje mi listwa około 3 m, i to samo w poziomie. Na początek jednak chciałem sprawdzić poziom ponieważ, pion i sterowanie zawsze można będzie dołożyć. I tutaj pojawia się pytanie jaki napęd łąńcuch czy pas. Trudne warunki pracy i lepka substancja , któ®a może osadzać na elementach ruchomych może być nie lada problemem dla takiego rozwiązania. Najlepszym rozwiązaniem było by ramie typu uniwersalny robot ale to nie na mój budżet a tym samym o wiele trudniejsze do programowania.
: 06 sie 2016, 00:41
autor: krzysiekgrab
Z doświadczenia wiem, że niektórzy nie lubią komputera i monitora i wolą kompaktowe rozwiązania -stąd moja propozycja. Dwie czy trzy osie to nie problem. Na ruch poziomy listwy zębate jak najbardziej. W pionie juz trochę gorzej.Jest dużo konstrukcji. IMO kwestia zabezpieczenia, aby farba nie padła bezpośrednio na mechanizmy 'robota', które i tak pewnie będą za pistoletem malarskim. Do tego jakiś odciąg. ...
krzysiek
: 06 sie 2016, 09:59
autor: foreman
To ma być rozwiązanie jak najprostsze. Oparte praktycznie o regulacje potencjometrami prędkości pistoletu na szynie i prędkości posuwu pionowego. Z odciągiem będzie problem ponieważ ma to być urządzenie mobilne nie stacjonarne. Powłoki które będą natryskiwane będą mocno pylić i osiadać. Dlatego zastosowanie tego rozwiązania w pionie staje pod znakiem zapytania. Najlepszym rozwiązaniem było by ramie takie np jak uniwersal robot tylko pracujące w mniejszej ilości osi. Wówczas zakładamy rękaw ochronny który wymieniamy po każdym zapyleniu i po problemie. Jednak na takie rozwiązanie mnie nie stać. No i oczywiście dochodzi tam skomplikowane oprogramowanie i sterowanie, które w branży budowlanej nie bardzo się sprawdza.
: 06 sie 2016, 10:51
autor: dance1
w życiu robota do takich zadań bym nie polecił, nadaje się on jak byś miał serie kilkanaście setek, tysięcy w tym samym kolorze, do jednostkowych, małoseryjnych robót nie opłacalny, samo czyszczenie systemu to litry chemii w śmietnik, a musisz to robić co wymiana koloru lub zakończona praca, inaczej pompę/y zezłomujesz. Samo sterowanie to bułka z masłem
: 06 sie 2016, 17:31
autor: foreman
Nie sugerujcie się nazwą farba. Nie będzie żadnych zmian kolorów a pistolet będzie demontowalny. Przy ręcznej pracy jest tyle samo pracy przy konserwacji co przy zatomatyzowanej.
Tylko są ważne udogodnienia:
1. Robot raczej się nie męczy i jest w stanie zrobić około 50% więcej dziennie niż człowiek.
2. Nakłada równiej i dokładniej
Napewno się sprawdza ale dotychczasowe koszty komercyjnych rozwiązań są zbyt przesadzone co do ceny.
Jeśli to jest takie proste to proszę o wycenę i działamy.
1.Robot porusza się na wózku (1 silnik) , lewo-prawo (2 silnik on)
2.Robot nie porusza się (1 silnik 0ff) , lewo-prawo (2 silnik on) góra- dół (3 silnik on)
Substancja którą natryskuje jest lepka i przyczepia się do każdego materiału na który spadnie.