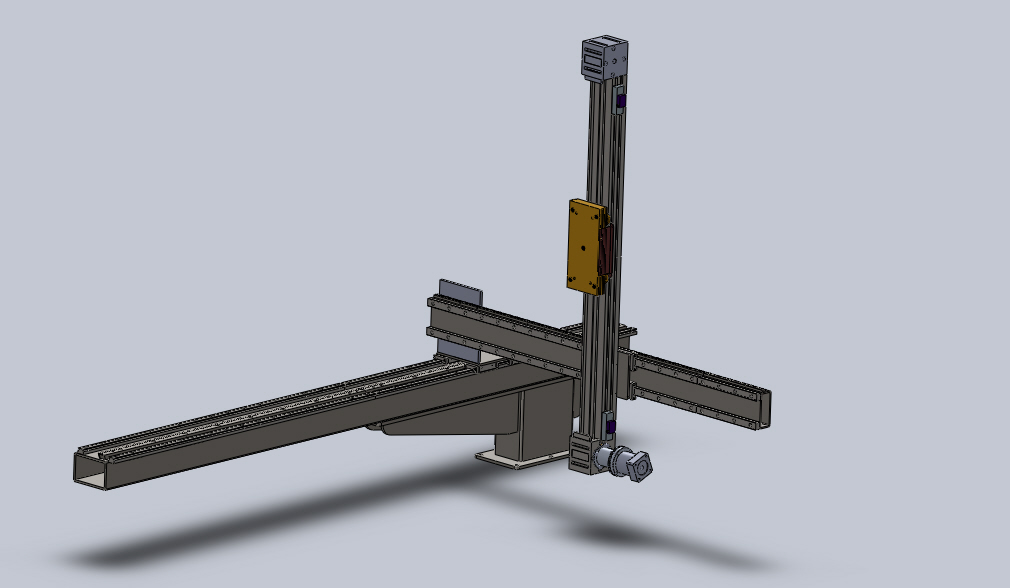
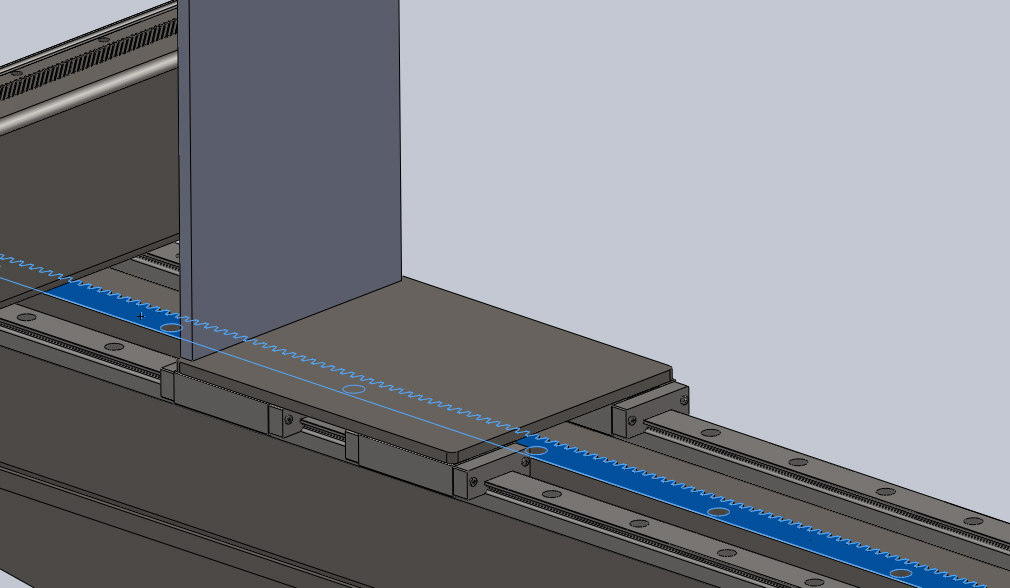
Mam problem polegajacy na tym ze nie wiem jak dobrać Serwomotor do robota trawersowego. To są 3 osie, 2 pierwsze napędzane ukladem z listwa zębatą i chcialbym zeby one "chodziły" z prędkością 0.8m/s ze skokiem: pierwsza 2000, druga 900, trzecia 1200 ( ta trzecia pracuje w pionie ma byc napedzana paskiem zębatym) To bedzie zrobione na profilach stalowych dosyc ciezkich, calosc wazy okolo180 kg. Zeby serwo dało rade osiagac takie predkosci - jak powinien byc dobrany moment obrotowy?? moze ktos ma czas zeby wyjasnic co to znaczy ze moment bezwladnosci obciazenia do momentu bezwł. ukladu napedowego musi pozostawac w stosunku 2:1 -tak znalazlem w sieci to slowa inzyniera z Rexrotha. Co w moim przypadku jest układem napedowym (sam rotor silnika??)a co obciazeniem ? Moze wystarczy przyjąc moment z odpowiednio wiekszy, jak z wyhamowywaniem wozka? jak sie rozbuja do 0.8m/s to moze wyleciec przez sciane do sąsiada. Pod spodem wstępny model w solidzie-obrazek 1 i wstępny wózek, wszelkie sugestie mile widziane na kazdy temat.