Strona 1 z 1
Kalibracja stolu obrotowego w Linuxie
: 16 paź 2018, 02:26
autor: philips221
Witam mam problem z kalibracja stolu obrotowego(os A) .Stol ma zamontowany sinik krokowy,i jest na Linuxie .W stepkonf, wybralem wersje Frezarki X Y Z plus os A.Dane stolu:, przekladnia na pasku zebatym 1:1 , silnik 8,5Nm 8,8A stol 200mm , 30kg, 90 obrotow korbka=360 stopni czyli pelny obrot stolu.Czy ktos moze pomoc mi w kalibracji w stepkonf? Mam z tym problem , mecze sie juz godzine.Mam tez pytanie odnosnie maksymalnej szybkosci silnika w stepkonf jaka powienienem ustawic a takze w przyspieszeniu.Probowalem roznych wersji konfiguracji ale stopnie o ktore obracam os A na ekranie Linuxa nie zgadzaja sie z rzeczywistym katem obrotem stolu.
Zdjecia stolu sa w tym watku
wiertarka-ze-stolem-obrotowym-na-linuxie-t93998.html
Pozdrawiam
Re: Kalibracja stolu obrotowego w Linuxie
: 16 paź 2018, 09:29
autor: GumiRobot
A gdzie ten config z linuxcnc - z fusów mamy wróżyć?
Re: Kalibracja stolu obrotowego w Linuxie
: 16 paź 2018, 19:12
autor: philips221
Nie cwaniakuj i grzeczniej troche .Osoby chetne do pomocy prosze o pomoc.
Dodane 2 godziny 38 minuty 5 sekundy:
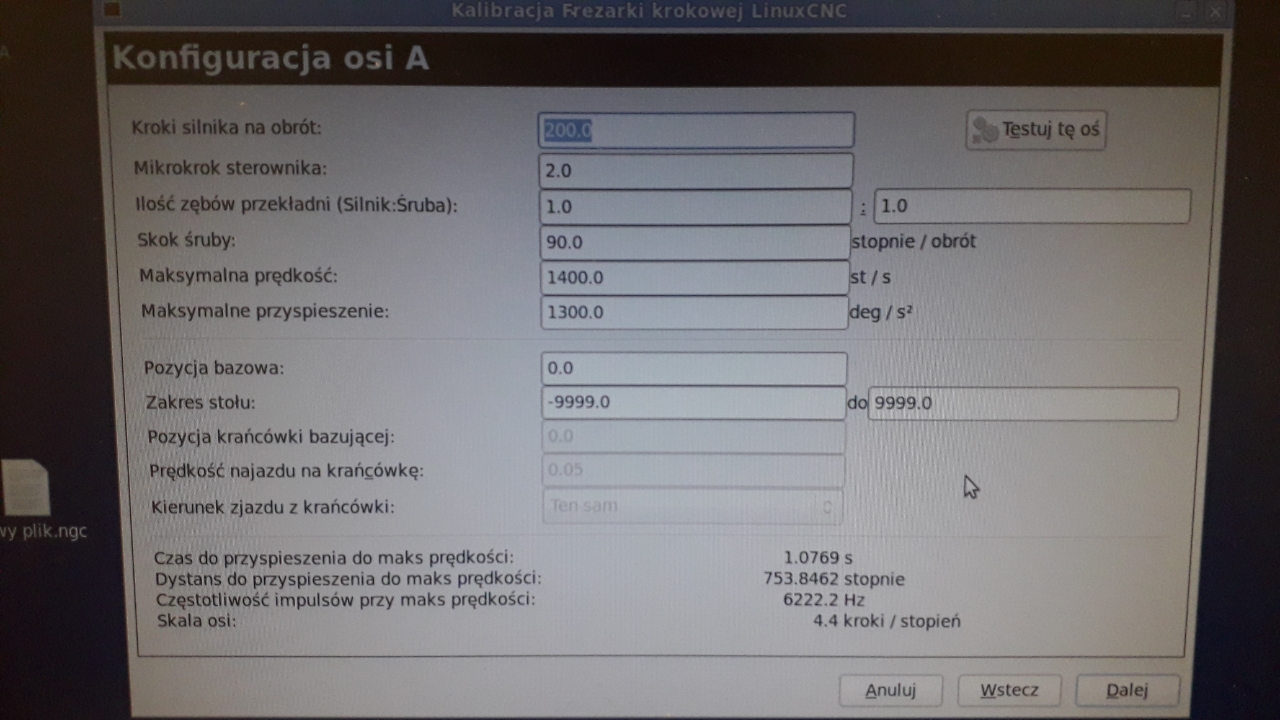
Tak wyglada zdjecie z kreatora stepkonf
Re: Kalibracja stolu obrotowego w Linuxie
: 19 paź 2018, 16:48
autor: markcomp77
Na zamieszczonym ekranie konfiguracji są odpowiedzi na zadane pytania.
Do zerowania stołu musi istnieć "krańcówka" określająca początek... może to być coś w rodzaju INDEX dla serwa czy osi obrotowej... Musi byś dostępny sygnał, ma który będzie robione zerowanie...
Prędkość?... Dla silnika dobrze zasilanego prędkość dla szczyt mocy powinna wypadać gdzieś w zakresie 5..10obr/sek (lub mniej przy braku właściwego zaspokajania potrzeb silnika).
Oczywiście sam linuxcnc też ma coś wspólnego z prędkością, jeśli Jitter komputera jest rozsądny (10..20us), to maksymalna częstotliwość pulsu będzie gdzieś w okolicach 40...60KHz.
i dalej.... staramy się zastosować największy podział kroku na sterowniku, który pozwoli na osiągnięcie potrzebnej prędkości na wyjściu (tutaj występuje zagadnienie dobrania przełożenia), a z drugiej strony -> puls kroku przy maksymalnej prędkości nie może przekroczyć tego 40..60KHz.
Można zerkać na "Częstotliwość impulsów..." z dołu ekranu przy wybieraniu podziału kroku na górze...
Re: Kalibracja stolu obrotowego w Linuxie
: 19 paź 2018, 21:30
autor: kamar
markcomp77 pisze: ↑19 paź 2018, 16:48
Do zerowania stołu musi istnieć "krańcówka" określająca początek... może to być coś w rodzaju INDEX dla serwa czy osi obrotowej... Musi byś dostępny sygnał, ma który będzie robione zerowanie...
Mało jest na tym świecie rzeczy bardziej zbędnych od krańcówki na osi obrotowej

Ustawiając zakresy na "+" i "-" zero i bazę masz zawsze tam gdzie ją zostawisz.
Skalę to najwygodniej ustawić bezpośrednio w pliku .ini
Czasem wartość skali trzeba podawać z trzema miejscami po przecinku aby 360 dawało faktycznie pełny obrót.
Bardziej przydatny jest pierścień na drugim końcu osi silnika (jak jest) z naniesionymi znakami.
Krokowiec przy starcie lekko skacze i to pozwala precyzyjnie wyzerować.
Re: Kalibracja stolu obrotowego w Linuxie
: 20 paź 2018, 13:50
autor: markcomp77
kamar pisze: ↑19 paź 2018, 21:30
Ustawiając zakresy na "+" i "-" zero i bazę masz zawsze tam gdzie ją zostawisz.
[...]
Bardziej przydatny jest pierścień na drugim końcu osi silnika (jak jest) z naniesionymi znakami.
Krokowiec przy starcie lekko skacze i to pozwala precyzyjnie wyzerować.
Czyli zerowanie na oko + ew. zerowanie przed przełożeniem, na osi silnika, co ma zapewnić większą dokładność