Witam,
razem ze znajomym chcemy wymienić do testów w jednej osi silnik krokowy 3Nm na domowej roboty serwomotor.
W osi zamontowana jest śruba kulowa o skoku 5 mm. Na maszynce są obrabiane głównie tworzywa sztuczne. Kolega narzekał na prędkość posuwu więc zasugerowałem wymianę krokówki na serwo.
Teraz zastanawiam się jak dobrać silnik DC tak, żeby mu mocy nie zabrakło. Silnik miałby przełożenie na pasku zębatym. Zastanawiam się nad silnikiem elektrycznym do roweru na przykład 500W, 2500 obr/min.
Gdyby zastosować przełożenie 1:2 to mamy teoretycznie 1250 obr/min co przy skoku 5 mm daje nam ponad 6 m/min czyli już bardzo dużo. Pytanie czy taki silnik nie będzie miał problemów z ruszeniem osi.
Co wy na to?
Parametry silnika prądu stałego w zastępstwie za krokówkę


-
 ursus_arctos
ursus_arctos
- Lider FORUM (min. 2000)
")
- Posty w temacie: 3
- Posty: 2083
- Rejestracja: 11 cze 2011, 18:29
- Lokalizacja: Warszawa / Lublin
A jakie tam są faktycznie siły? Bo krokówka musi mieć zapas, żeby się nie zgubić - serwo już niekoniecznie. Ja mam w swojej frezarynce silniki o mocy ciągłej chyba 60W i pędzę nimi śruby trapezowe (!) do 2000RPM. Opory są bardzo duże, a mimo to układ daje radę.
Serwa kupiłem używane na "starek CNC" czy jakoś tak.
Serwa kupiłem używane na "starek CNC" czy jakoś tak.
-
bmajkut
Autor tematu - Specjalista poziom 1 (min. 100)
")
- Posty w temacie: 18
- Posty: 284
- Rejestracja: 02 lis 2012, 18:59
- Lokalizacja: Wrocław
Wiedziałem że ty się zainteresujesz tym tematem  Widziałem twoją maszynę w akcji na jutube.
Widziałem twoją maszynę w akcji na jutube.
U ciebie jest mniejszy skok gwintu więc potrzeba mniejszej siły by tym zakręcić, z drugiej strony masz maszynę ze sklejki gdzie mogą pojawiać się niedociągnięcia które przeszkadzają silnikowi w jego pracy.
U kolegi są śruby kulowe ze skokiem 5 mm, skok niby większy ale śruby z nakrętką lepiej pracują, są też prowadnice Hiwin.
Koledze wystarczyło by gdyby posuw był w okolicach 2m/min więc ok 400 obr/min.
Chciałbym do testów wykorzystać silnik z allegro, jakiś chiński do roweru. Moc ok 500W i obroty rzędu 3000 obr/min. Tego typu silniki mają moment podany w dokumentacji niby 1 - 2 Nm przy maksymalnych obrotach to chyba jest podawane. Czyli jakbyśmy przekładnię na pasku zrobili w tym przypadku 1:6 to powinno być 6 - 12 Nm.
Nie wiem czy to w taki sposób działa, czy to można w ten sposób przeliczać.
Nad sterownikiem już pracuję, mózgiem będzie STM32F4-Discovery, do tego enkoder magnetyczny na śrubie AS5040 no i jakiś stopień mocy na mosfetach i driverach. Z wyborem mosfetów nie będzie problemu, gorzej z driverami.
U ciebie jest mniejszy skok gwintu więc potrzeba mniejszej siły by tym zakręcić, z drugiej strony masz maszynę ze sklejki gdzie mogą pojawiać się niedociągnięcia które przeszkadzają silnikowi w jego pracy.
U kolegi są śruby kulowe ze skokiem 5 mm, skok niby większy ale śruby z nakrętką lepiej pracują, są też prowadnice Hiwin.
Koledze wystarczyło by gdyby posuw był w okolicach 2m/min więc ok 400 obr/min.
Chciałbym do testów wykorzystać silnik z allegro, jakiś chiński do roweru. Moc ok 500W i obroty rzędu 3000 obr/min. Tego typu silniki mają moment podany w dokumentacji niby 1 - 2 Nm przy maksymalnych obrotach to chyba jest podawane. Czyli jakbyśmy przekładnię na pasku zrobili w tym przypadku 1:6 to powinno być 6 - 12 Nm.
Nie wiem czy to w taki sposób działa, czy to można w ten sposób przeliczać.
Nad sterownikiem już pracuję, mózgiem będzie STM32F4-Discovery, do tego enkoder magnetyczny na śrubie AS5040 no i jakiś stopień mocy na mosfetach i driverach. Z wyborem mosfetów nie będzie problemu, gorzej z driverami.
-
ursus_arctos
- Lider FORUM (min. 2000)
- Posty w temacie: 3
- Posty: 2083
- Rejestracja: 11 cze 2011, 18:29
- Lokalizacja: Warszawa / Lublin
Drivery: wiem, że drogie, ale HIP4081A są bezproblemowe i potężne.
Moja maszyna obecnie jest z granitu, nie ze sklejki - pędzę tym silnikiem (jednym!) 2 śruby trapezowe Tr16x4 - jak syfu nalezie do nakrętek to opory są takie, że niekiedy ciężko śrubę obrócić ręką - a silnik kręci.... Przyśpieszenia mam 0.6m/s^2, prędkości do 7m/min.
Moja maszyna obecnie jest z granitu, nie ze sklejki - pędzę tym silnikiem (jednym!) 2 śruby trapezowe Tr16x4 - jak syfu nalezie do nakrętek to opory są takie, że niekiedy ciężko śrubę obrócić ręką - a silnik kręci.... Przyśpieszenia mam 0.6m/s^2, prędkości do 7m/min.
-
bmajkut
Autor tematu - Specjalista poziom 1 (min. 100)
- Posty w temacie: 18
- Posty: 284
- Rejestracja: 02 lis 2012, 18:59
- Lokalizacja: Wrocław
Kupiłem silnik SKF 90VDC, 3300 rpm, 70W. Zdemontowałem fabryczny enkoder i przymocowałem AS5040, czyli enkoder magnetyczny o rozdzielczości 1024 impulsów na obrót. Enkoder sprawuje się doskonale.
Mam niestety problem ze zbudowaniem mostka H. Posiadam dwa drivery IR2101 i cztery mosfety IRF630N. Póki co tworzę prototyp w oparciu o Arduino Nano. Drivery są jakieś dziwne, bo kiedy wystawiam na ich wejściach stany wysokie, niskie na zmianę to silnik się nie kręci. Wszystko zaczyna działać kiedy podaję sygnał PWM na oba wejścia.
Czy ktoś potrafi mi wytłumaczyć dlaczego tak to działa? Może ten scalak się nie nadaje do takiego zastosowania? Szukałem na TME i nic sensownego nie znalazłem. Zaczynam się zastanawiać czy zamiast driverów nie wykorzystać tranzystorów bipolarnych.
Mam niestety problem ze zbudowaniem mostka H. Posiadam dwa drivery IR2101 i cztery mosfety IRF630N. Póki co tworzę prototyp w oparciu o Arduino Nano. Drivery są jakieś dziwne, bo kiedy wystawiam na ich wejściach stany wysokie, niskie na zmianę to silnik się nie kręci. Wszystko zaczyna działać kiedy podaję sygnał PWM na oba wejścia.
Czy ktoś potrafi mi wytłumaczyć dlaczego tak to działa? Może ten scalak się nie nadaje do takiego zastosowania? Szukałem na TME i nic sensownego nie znalazłem. Zaczynam się zastanawiać czy zamiast driverów nie wykorzystać tranzystorów bipolarnych.
-
atom1477
- Lider FORUM (min. 2000)
- Posty w temacie: 12
- Posty: 2785
- Rejestracja: 21 kwie 2011, 10:58
- Lokalizacja: ::
Nadaje się. Ale nie bezpośrednio. Bo po pierwsze:
1. Mają układ detekcji zbocza na wejściach. Wykryją tylko zmianę z 0 na 1, albo z 1 na 0. Trochę to wkurzające dla mnie było, bo teoretycznie układ może przeoczyć zbocze i nie wykryje już stanu 0 nie pozwalając wyłączyć silnika.
Mnie wkurzyło akurat coś odwrotnego, bo układ nie chciał mi się załączyć. Gdy podawałem stan 1 równocześnie z podaniem napięcia zasilania. Po prostu gdy układ wstał to już miał 1 na wejściu i nie widział zbocza (narastającego, czyli zmiany z 0 a 1).
Krótki impuls stanu niskiego rozwiązywał problem. Ale to wszystko przy zasilaniu strony wysokiej (High-Side) z osobnego zasilania. I tu dochodzimy do punktu:
2. Zasilanie strony wysokiej (High-Side) zwykle robi się układem Bootstrap. On się ładuje przy stanie niskim. W stanie wysokim zasila się z tego "naładowania". "Naładowanie" nie trwa wiecznie. Tak więc układ nie jest w stanie pracować w stanie wysokim dowolnie długo jeżeli będzie zasilany układem Bootstrap. W stanie wysokim może pracować dowolnie długo tylko jeżeli strona wysoka będzie zasilana z osobnego zasilania.
Pokaż schemat jak to podłączyłeś.
1. Mają układ detekcji zbocza na wejściach. Wykryją tylko zmianę z 0 na 1, albo z 1 na 0. Trochę to wkurzające dla mnie było, bo teoretycznie układ może przeoczyć zbocze i nie wykryje już stanu 0 nie pozwalając wyłączyć silnika.
Mnie wkurzyło akurat coś odwrotnego, bo układ nie chciał mi się załączyć. Gdy podawałem stan 1 równocześnie z podaniem napięcia zasilania. Po prostu gdy układ wstał to już miał 1 na wejściu i nie widział zbocza (narastającego, czyli zmiany z 0 a 1).
Krótki impuls stanu niskiego rozwiązywał problem. Ale to wszystko przy zasilaniu strony wysokiej (High-Side) z osobnego zasilania. I tu dochodzimy do punktu:
2. Zasilanie strony wysokiej (High-Side) zwykle robi się układem Bootstrap. On się ładuje przy stanie niskim. W stanie wysokim zasila się z tego "naładowania". "Naładowanie" nie trwa wiecznie. Tak więc układ nie jest w stanie pracować w stanie wysokim dowolnie długo jeżeli będzie zasilany układem Bootstrap. W stanie wysokim może pracować dowolnie długo tylko jeżeli strona wysoka będzie zasilana z osobnego zasilania.
Pokaż schemat jak to podłączyłeś.
-
etet100
- Specjalista poziom 2 (min. 300)
- Posty w temacie: 15
- Posty: 569
- Rejestracja: 24 lut 2008, 12:40
- Lokalizacja: Rybnik
- Kontakt:
Ten AS5040 naprawdę umożliwia uzyskanie stabilnych 10 bitów ? I to się nadaje do w pracy w "trudnych" warunkach ? Jakiego magnesu użyłeś i jak jest zamocowany na osi ?
Osobiście używam driverów ir2184 i większość projektów które widziałem tego używają. Mam też kilka HIP4081A ale od kilku lat nie udało mi się zabrać za testy.
Osobiście używam driverów ir2184 i większość projektów które widziałem tego używają. Mam też kilka HIP4081A ale od kilku lat nie udało mi się zabrać za testy.
-
bmajkut
Autor tematu - Specjalista poziom 1 (min. 100)
- Posty w temacie: 18
- Posty: 284
- Rejestracja: 02 lis 2012, 18:59
- Lokalizacja: Wrocław
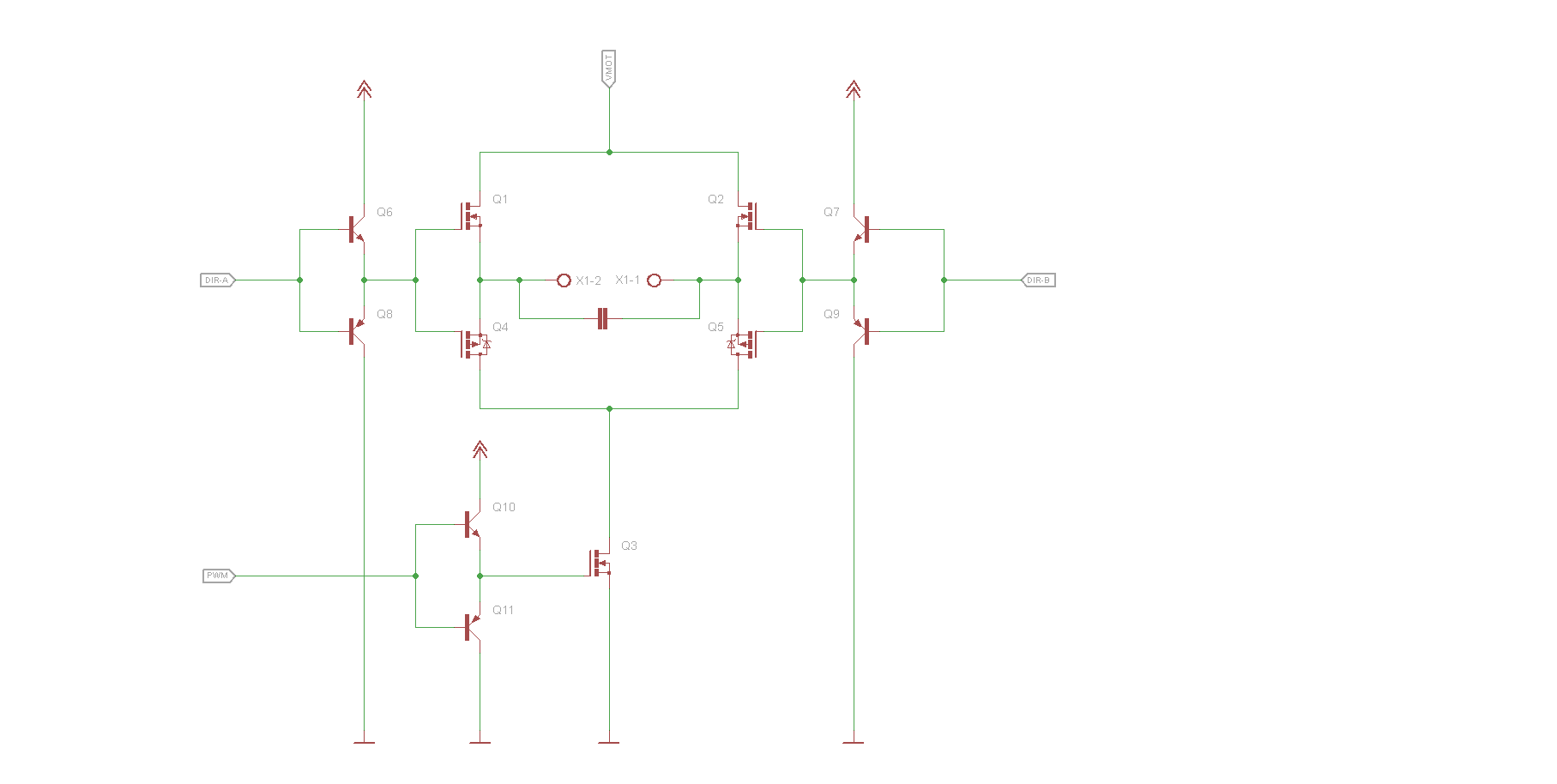
Porzuciłem projekt budowy mostka w oparciu o drivery. Poczytałem trochę w internecie i doszedłem do wniosku że nie będę pracował w aż tak dużych częstotliwościach. No bo jak często będę zmieniał kierunek obrotu silnika? Szybciej chyba będzie przełączany mosfet odpowiedzialny powiedzmy za prędkość silnika. Zastosuję dwa mosfety N na górze i dwa mosfety P na dole + jeden mosfet N na dole do sterowania prędkością. Każdą parą mosfetów mogę sterować przy pomocy dwóch tranzystorów bipolarnych NPN + PNP i myślę żę to wystarczy.
Powiedzmy, że coś na wzór tego chcę przetestować:
A tak wygląda moja konstrukcja z enkoderem:
Enkodery te sprawują się bardzo dobrze we wszelkich zastosowaniach. Scalaki i dedykowane do nich magnesy dostałem jako sample od producenta. Póki co magnes po prostu przyłożyłem do wirnika silnika i trzyma się bardzo mocno. Magnesy do tych enkoderów są niewyobrażalnie mocne. Chyba mocniejsze niż neodymowe podobnych rozmiarów.
Czujniki są tak dokładne że reagują na dmuchnięcie w stronę silnika i zmieniają wartość odczytu o 1 - 3 impulsów. Jak zrobię płytkę z STM32F103 to mogę ustawić odczyt enkodera na każdym zboczu i wtedy ma się rozdzielczość chyba nawet 4x większą i wszystko jest obsłużone sprzętowo.
Dodaję jeszcze schemat ideowy, mocno uproszczony. Nie mam jeszcze żadnych oporników dodanych bo muszę obliczyć ich wartości pod konkretne tranzystory. Zastanawiam się nad dodaniem jakiegoś układu abym mógł mostkiem sterować przy pomocy PWM + DIR.
Na tym schemacie mam też tylko dolne tranzystory ze zintegrowanymi diodami, ale docelowo wszystkie muszą mieć te diody. Podobno jak są diody w mosfecie to nie trzeba już zewnętrznych montować.
Powiedzmy, że coś na wzór tego chcę przetestować:
A tak wygląda moja konstrukcja z enkoderem:
Enkodery te sprawują się bardzo dobrze we wszelkich zastosowaniach. Scalaki i dedykowane do nich magnesy dostałem jako sample od producenta. Póki co magnes po prostu przyłożyłem do wirnika silnika i trzyma się bardzo mocno. Magnesy do tych enkoderów są niewyobrażalnie mocne. Chyba mocniejsze niż neodymowe podobnych rozmiarów.
Czujniki są tak dokładne że reagują na dmuchnięcie w stronę silnika i zmieniają wartość odczytu o 1 - 3 impulsów. Jak zrobię płytkę z STM32F103 to mogę ustawić odczyt enkodera na każdym zboczu i wtedy ma się rozdzielczość chyba nawet 4x większą i wszystko jest obsłużone sprzętowo.
Dodaję jeszcze schemat ideowy, mocno uproszczony. Nie mam jeszcze żadnych oporników dodanych bo muszę obliczyć ich wartości pod konkretne tranzystory. Zastanawiam się nad dodaniem jakiegoś układu abym mógł mostkiem sterować przy pomocy PWM + DIR.
Na tym schemacie mam też tylko dolne tranzystory ze zintegrowanymi diodami, ale docelowo wszystkie muszą mieć te diody. Podobno jak są diody w mosfecie to nie trzeba już zewnętrznych montować.
-
etet100
- Specjalista poziom 2 (min. 300)
- Posty w temacie: 15
- Posty: 569
- Rejestracja: 24 lut 2008, 12:40
- Lokalizacja: Rybnik
- Kontakt:
Na pewno wiesz jak działają serwa ? Utrzymanie zadanej pozycji uzyskuje się właśnie przez szybką zmianę kierunku obrotu silnika. Nie są to oczywiście żadne gigaherce ale na pewno dużo szybciej niż by to wynikało z tego jak przesuwa się dana oś frezarki.bmajkut pisze:Porzuciłem projekt budowy mostka w oparciu o drivery. Poczytałem trochę w internecie i doszedłem do wniosku że nie będę pracował w aż tak dużych częstotliwościach. No bo jak często będę zmieniał kierunek obrotu silnika? Szybciej chyba będzie przełączany mosfet odpowiedzialny powiedzmy za prędkość silnika.
Zostań lepiej przy sprawdzonych driverach. Nie zrobisz nic prostszego i lepszego. Tak naprawdę część sprzętowa prostego sterownika serw jest dosyć banalna. Ostatecznie można też kupić gotowy mostek h za 20$ na ebayu. Prawdziwym wyzwaniem jest algorytm regulatora PID czyli część programowa.bmajkut pisze:Zastosuję dwa mosfety N na górze i dwa mosfety P na dole + jeden mosfet N na dole do sterowania prędkością. Każdą parą mosfetów mogę sterować przy pomocy dwóch tranzystorów bipolarnych NPN + PNP i myślę żę to wystarczy.
Aż ktoś dostanie w oko.bmajkut pisze:Enkodery te sprawują się bardzo dobrze we wszelkich zastosowaniach. Scalaki i dedykowane do nich magnesy dostałem jako sample od producenta. Póki co magnes po prostu przyłożyłem do wirnika silnika i trzyma się bardzo mocno.
I to dmuchnięcie obraca oś ? Mam kilka serw i nie wyobrażam sobie żeby tak było. Kiedyś mówiło się o niektórych miernikach czy czujnikach, że wynik zależy od wszystkiego łącznie z prędkością wiatru. Trochę tak to brzmi. A jak to reaguje na obecność jakiegoś dodatkowego pola magnetycznego ?bmajkut pisze:Czujniki są tak dokładne że reagują na dmuchnięcie w stronę silnika i zmieniają wartość odczytu o 1 - 3 impulsów. Jak zrobię płytkę z STM32F103 to mogę ustawić odczyt enkodera na każdym zboczu i wtedy ma się rozdzielczość chyba nawet 4x większą i wszystko jest obsłużone sprzętowo.