



")
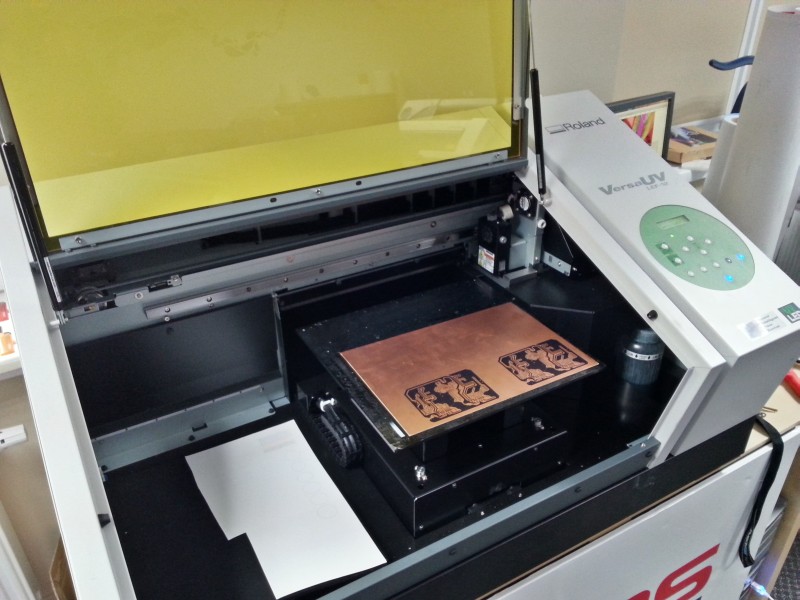
Do zrobienia płytek wykorzystałem ploter Roland VersaUV LEF-12. Maszyna jest w stanie drukować kolorami CMYK + Biały i lakier, więc właściwie można nią stworzyć dowolną płytkę PCB z opisem i maskami.
Super sprawa - wsadzamy płytkę do plotera, drukujemy i już... Niestety opcja dla zwykłego śmiertelnika niedostępna gdyż maszyna kosztuje około 20000€... :]
Chciałbym tutaj nadmienić, że normalnie służy do druku gadżetów a druk płytek PCB to mój wymysł
Trochę zdjęć aby pokazać jak to wyglądało:
Najpierw próba na płytce PCV jak wychodzi wydruk i czy jakość jest wystarczająca. Roland drukuje z rozdzielczością 1440dpi, więc musiało być ok.
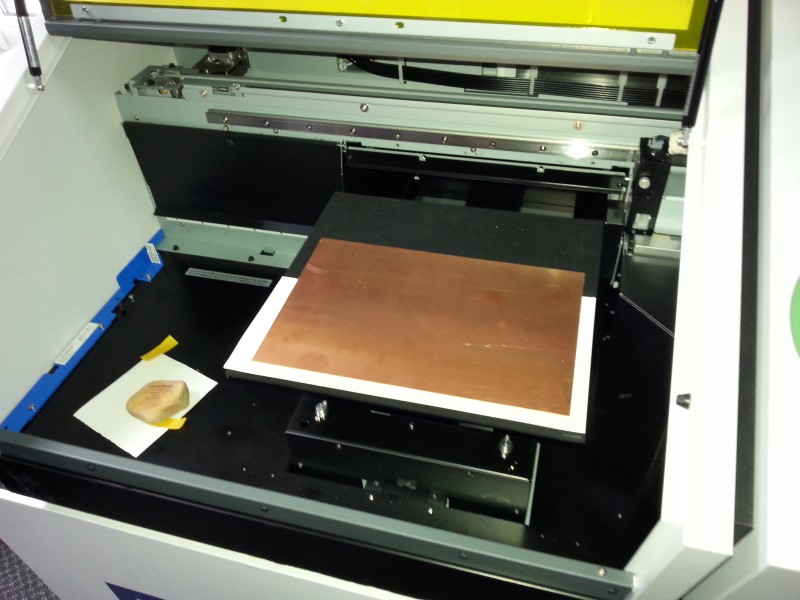
Wsadzamy laminat ustawiamy wysokość i drukujemy:
Zrobiłem dwie wersje, zadruk podwójnej grubości i pojedynczej okazało się, że zadruk pojedynczy był wystarczający.
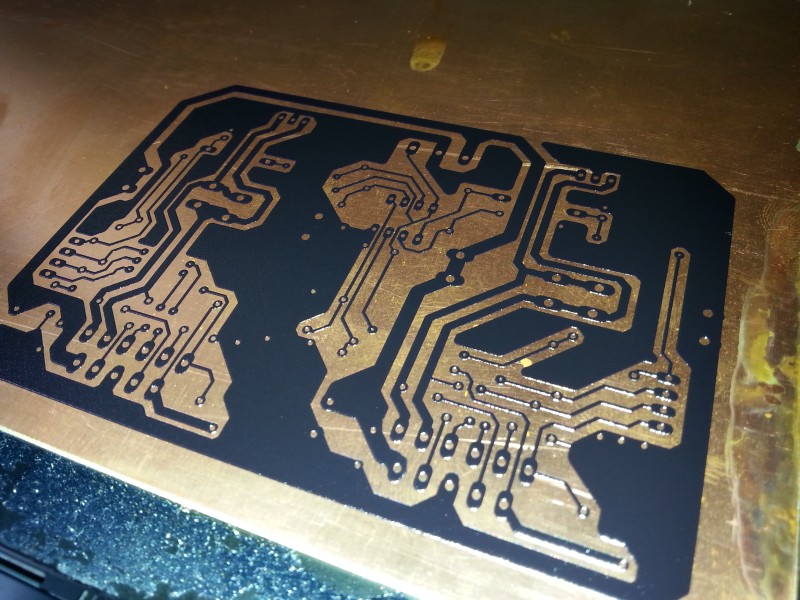
Trawienie:

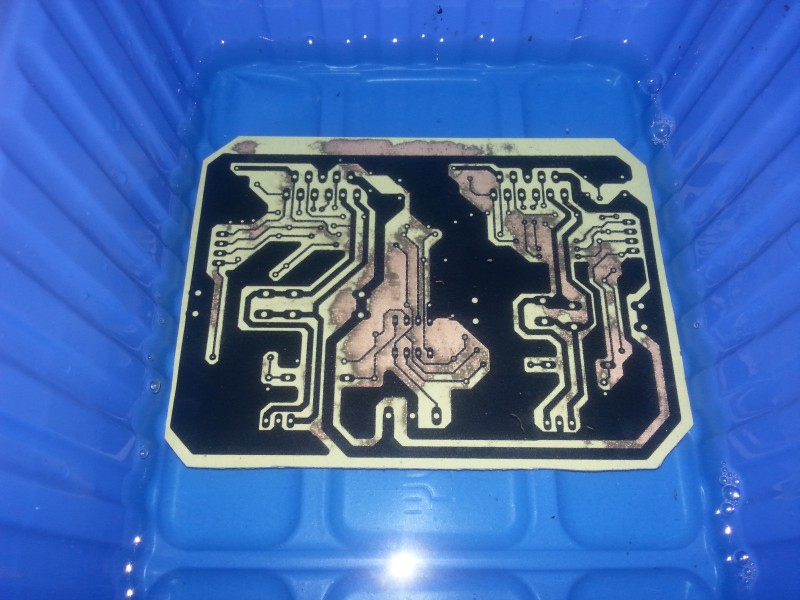
Po wytrawieniu farbę UV można usunąć poprzez odparzenie farby gorącą wodą.


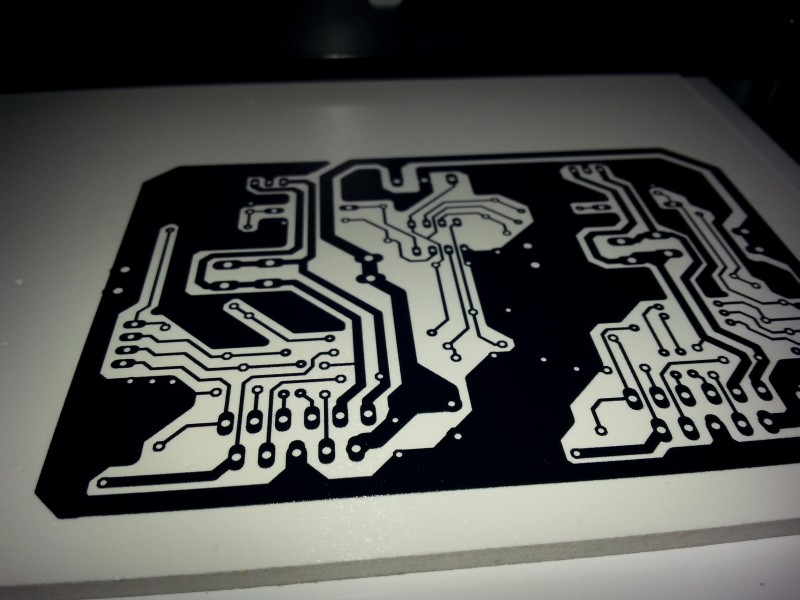
Tak wygląda efekt końcowy:
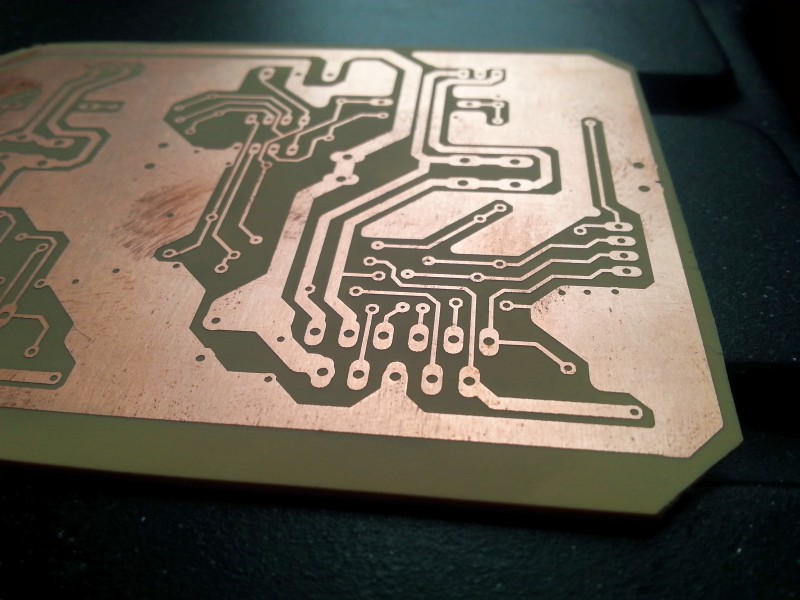
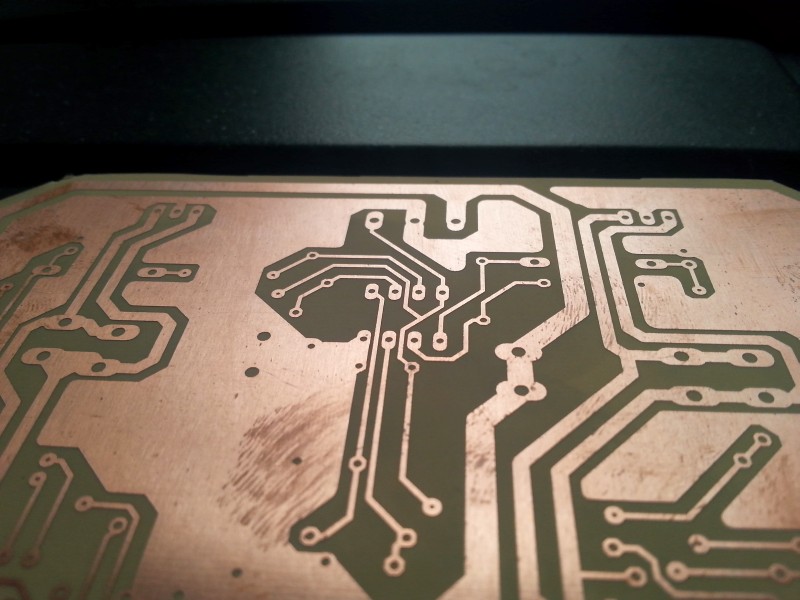
Jak oceniacie efekt końcowy?
Jutro druknę jakąś płytkę z malutkimi padami od scalaka powierzchniowego.
Zamieściłem tutaj ten opis jako ciekawostkę gdyż w ten sposób nikt raczej płytek nie wytwarzał... a na pewno nie na takim ploterze.



")

")


")






